国产Agibot®腔镜机器人首次人体试验手术3 例报道
2024-05-15徐林锋刘光香张顺郭宏骞
徐林锋 刘光香 张顺 郭宏骞
南京大学医学院附属鼓楼医院泌尿外科,南京大学泌尿外科学研究所,南京 210008
前列腺癌和肾癌均属于泌尿系统常见的恶性肿瘤,对人体健康和社会公共卫生造成了严重影响[1,2]。据流行病学调查,我国前列腺癌和肾癌的发病率均呈逐年上升趋势,这种增长趋势可能受人口老龄化、环境污染、不健康的生活方式等多种因素影响[3,4]。在局限性前列腺癌的临床治疗中,根治性前列腺切除术被视为主要的治疗手段,这种治疗手段能够彻底清除肿瘤,同时力求保留患者的尿控和勃起功能,从而延长患者的整体生存期并保证患者的生活质量[5]。大量研究证实,肾部分切除术对于肾癌具有显著的疗效,能够有效降低肾癌患者的疾病进展和死亡风险[6,7]。
传统腹腔镜下的肾部分切除术和根治性前列腺切除术因其创伤小、出血少、并发症少、术后恢复快等优点而得到广泛应用[8]。然而,腔镜器械的“筷子效应”使其在临床应用中带来一些挑战,如缝合困难和学习曲线长[9]、镜头的不稳定性,直杆器械自由度小,不符合术者人体工程学等[10]。随着da Vinci 腔镜机器人在泌尿外科领域的应用,达芬奇系统从根本上改变了传统的手术室布局,颠覆了外科手术的观念。在进行手术时,术者无需亲自刷手,只需通过操作平台操控灵活的机械臂及360°可旋转的腕关节器械,在高清晰度放大的三维手术视野中,如同操控游戏机一般进行手术。这种方式不仅能更好地保护重要解剖结构,实现更精细的操作,还能提高手术技巧、速度和精准度,将手术质量提升至全新水平。此外,达芬奇系统不断挑战手术禁区,其在手术复杂性和精细程度方面已超越传统腹腔镜技术[11]。手术关键步骤的掌握变得更为容易,初学者的学习曲线也相对更快[12]。机器人辅助的肾部分切除术、根治性前列腺切除术可以在更短时间内进行精细的缝合,且在人体工程学方面更具优势,临床应用日臻广泛[13]。南京大学医学院附属鼓楼医院泌尿外科于2023 年12 月开展了Agibot®腔镜手术机器人的首次人体试验(Firstin-Human clinical trial,FIH),完成了泌尿外科手术(1 例肾部分切除术、2 例根治性前列腺切除术)3 例,现报道如下。
1 临床资料
1.1 基本情况
患者Y01001,男,75 岁,术前总前列腺特异性抗原(prostate specific antigen,PSA)17.3 μg/L,术前行胸部CT+全腹部平扫及全身骨显像检查,综合影像学报告判断TNM 分期为cT2cNx-MO。
患者Y01002,男,57 岁,术前总PSA15.2 μg/L,术前行PET-CT 及全身骨显像检查,综合影像学报告判断TNM 分期为cT2bNxMO。
患者Y01003,男,44 岁,既往行开放性阑尾切除术。肾脏CT 示:右肾下极占位,边界清晰,大小约3.4 cm×2.8 cm,考虑肾癌可能。
1.2 手术方法
1.2.1Agibot®机器人辅助根治性前列腺切除术 患者全身麻醉,头低脚高位。取脐上2 cm 处纵行切口,建立气腹。置入10 mm 套管作为Agibot®机器人镜头孔(2 号臂),另取左、右锁骨中线上距离镜头8 cm 置入8 mm 套管作为左右器械孔(1 号臂、3 号臂)。取右侧近腋前线,器械孔外侧8 cm 作为第三器械孔(4 号臂)。取患者左侧近腋前线,距离器械孔外侧8 cm 作为主辅助孔。镜头孔和器械孔之间,取一副辅助孔,使之构成等腰三角形。布孔见图1。

图1 手术布孔
连接机器人系统,置入高清3D 腹腔镜镜头和双极弧形电凝钳、单极弧剪等器械。经腹腔入路,首先打开盆内筋膜,充分显露前列腺尖部和背深静脉复合体,缝扎阴茎背深静脉复合体(dorsal vascular complex,DVC)。4 号臂无创抓钳牵拉膀胱,判断膀胱颈位置后用3 号臂单极弧剪解剖分离前列腺膀胱连接部(见图2)。

图2 单极弧剪解剖分离前列腺膀胱连接部
切开膀胱颈后壁,暴露离断双侧输精管后分离精囊。锐性切开狄氏筋膜,游离至前列腺尖部,锐性加钝性分离前列腺侧韧带,此操作过程中尽量避免使用电凝,防止过多损伤神经血管束。逐步切断DVC,3 号臂剪刀离断尿道(见图3),尽可能多地保留功能尿道。

图3 单极弧剪离断前列腺与尿道
移除手术标本,仔细检查术野有无出血。4号臂换持针钳采用倒刺线双针双向连续吻合法吻合尿道与膀胱颈(见图4),检查无明显漏尿后,留置盆腔引流管1 根,脐下切口完整取出标本。
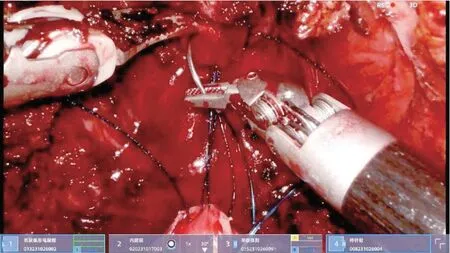
图4 吻合尿道与膀胱颈
1.2.2Agibot®机器人辅助肾部分切除术 患者取健侧70°~90°侧卧位,升高腰桥,头低足低。于患侧脐旁切开皮肤约2 cm,用Veress 针穿刺法建立气腹并置入鞘卡,作为镜头孔(2 号臂),分别于患侧锁骨中线附近,距离镜头孔10 cm(3 号臂)、髂前上极水平(1 号臂)切开1.5 cm 并穿刺作为左右器械孔,分别取患者正中线脐下和脐上,距离镜头孔10 cm(A)切开2 cm,置入套管,作为辅助孔。布孔见图5。
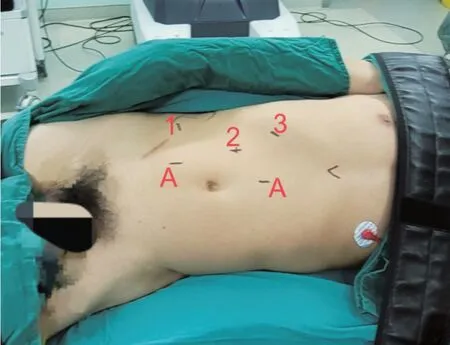
图5 布孔规划
建立气腹后,在腹腔镜监视下进入腹腔,固定机械臂于各鞘卡内,连接机器人手术操作系统,沿结肠外侧Toldt 线切开侧腹膜,下至髂血管水平,向上延至肝下缘或脾下缘,并沿肝下缘横行延长腹膜切口至下腔静脉右缘或沿脾下缘至左侧肾上腺缘。沿Gerota 筋膜前层和结肠融合筋膜之间分离,使结肠坠向腹中线,从而显露肾脏前面轮廓。根据术前CT 影像在肾静脉上下寻找肾动脉,并将其游离,以利于阻断(见图6)。
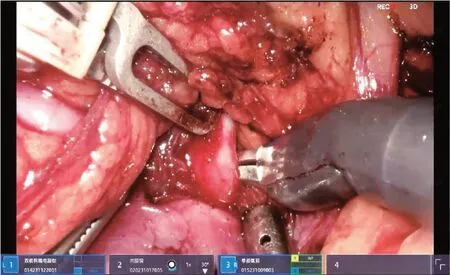
图6 游离显露肾动脉并夹闭
沿肾脏纵行切开肾周脂肪囊,充分显露肿瘤。临时阻断肾动脉,以电刀距肿瘤包膜外处切除肿瘤,注意保持肿瘤完整(见图7)。
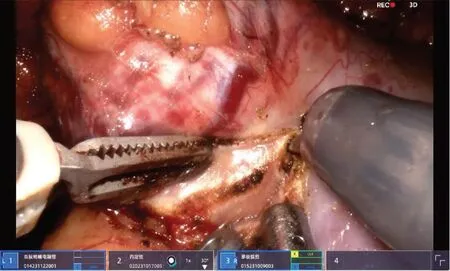
图7 切除肿瘤
将切除肿瘤置入标本袋中,用双极电凝在创面电凝止血,以2-0 及1-0 单乔线间断全层缝合创面,以Hem-o-lok 加压钳夹后打结(见图8)。松开阻断钳,记录阻断时间,观察创面无渗血。留置腹腔引流管,取出标本,逐层关闭切口。
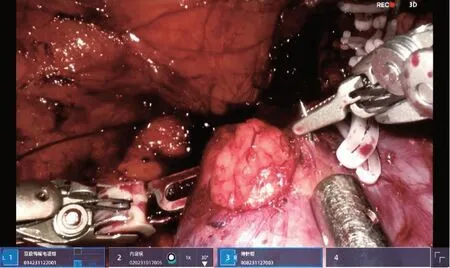
图8 缝合创面并用Hem-o-lok 加压打结
1.3 观察指标
记录安装时间、手术时间、热缺血时间、手术是否中转、并发症、输血情况、器械缺陷、不良事件以及Clavien-Dindo 并发症等指标,并采用满意度评分量表对主刀医师及助手开展泌尿外科手术的体验和满意度进行评分。在术后(24±4)h采用数字评定量表(numerical rating scale,NRS)对患者术后疼痛情况进行评分[14]。
1.4 伦理审查
本研究由南京大学医学院附属鼓楼医院伦理委员会批准实施,批准号:2023-532-01。
1.5 手术系统
Agibot®腔镜机器人系统(图9)由内置高清3 D 监视器的医师控制台、具有部署引导功能的四臂患者手术平台、内置3 D 融合视频图像处理器的图像平台、可重复使用的10 多种多自由度手术器械、及配套附件组成,并与适配的腹腔镜、电刀设备配合使用。该系统可兼容第三方3 D 内窥镜的成像,为主刀医师提供沉浸式的实时高清术野,其患者手术平台提供集成高清摄像头的对接引导功能,并为术中不同用户角色提供实时智能化交互界面,以实现机器人辅助手术的良好开展。

图9 Agibot®腔镜机器人系统
2 结果
3 例患者手术均顺利完成,无中转开放或普通腹腔镜手术,无术中及当天术后并发症发生,无输血,无器械缺陷。2 例根治性前列腺切除术的机器安装时间4~8 min,手术时间132~141 min,术中估计失血量50~100 ml,引流管引流时间3 d,术后住院时间3~5 d。1 例肾部分切除术的机器安装时间6 min,手术时间87 min,术中估计失血量100 ml,热缺血时间24 min,引流管引流时间3 d,术后住院时间7 d。患者术后有轻微疼痛感,术后第2 天即可下地活动。患者手术结果见表1。出院后对患者进行常规随访。患者术后病理情况见表2。主刀医生及助手对3 例Agibot®腔镜机器人手术的性能评估及满意度评分结果见表3。
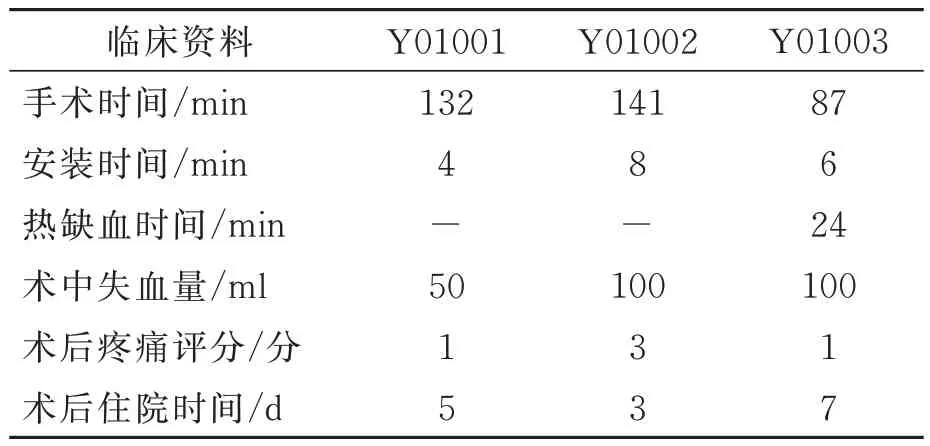
表1 手术指标结果
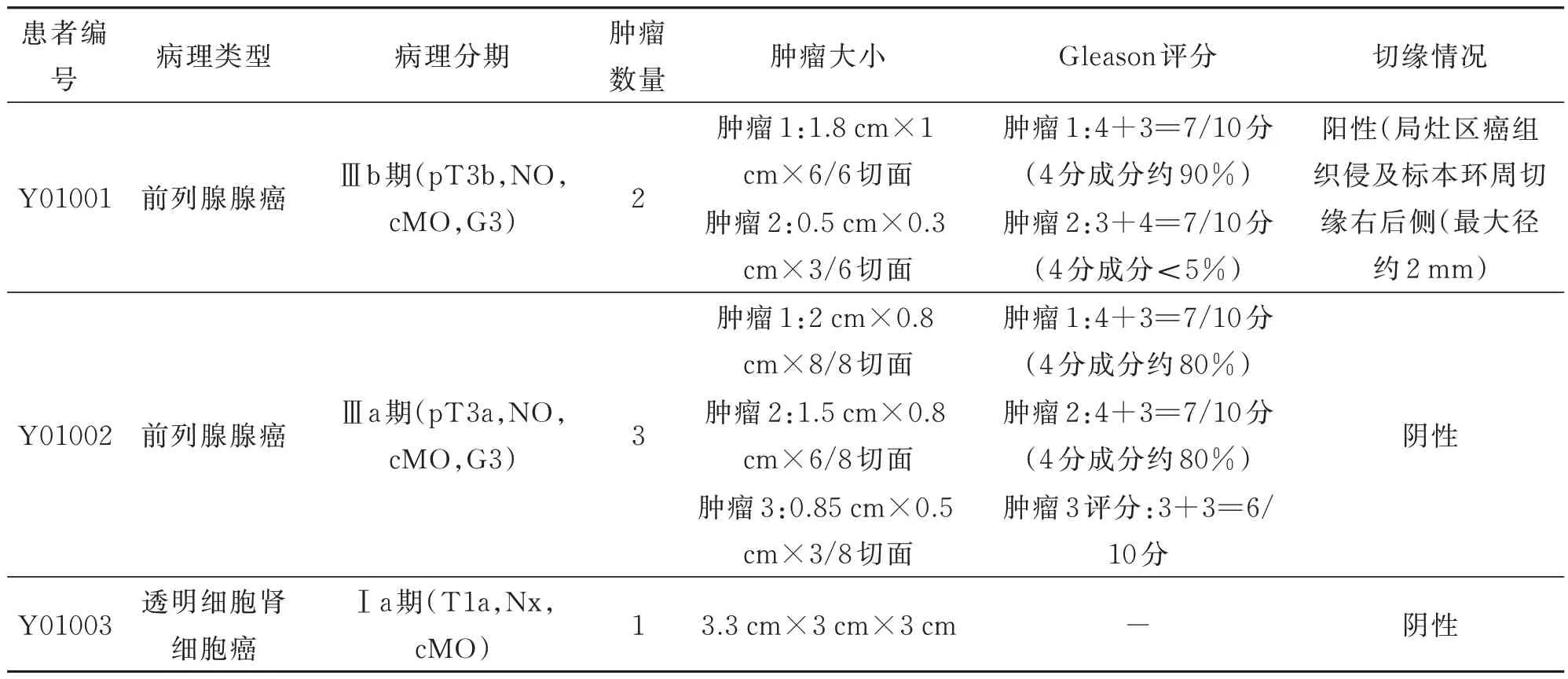
表2 术后病理情况
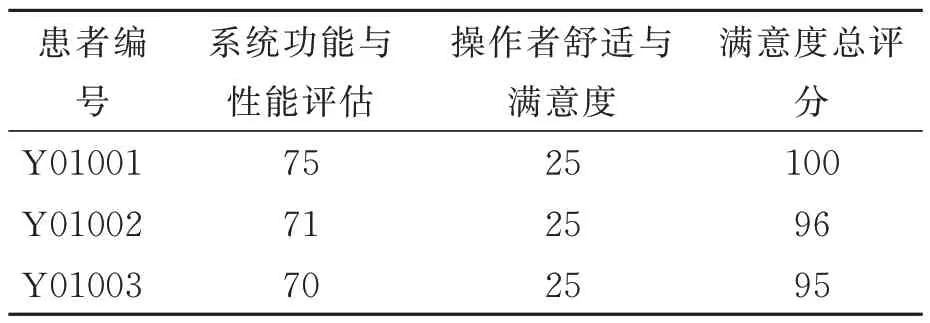
表3 主刀医师及助手满意度评分结果(分)
3 讨论
以腹腔镜为代表的微创手术已成为泌尿外科领域的主流技术[15]。近年腔镜手术机器人技术发展迅速,特别是以达芬奇为代表的机器人系统,在泌尿外科手术中得到了广泛应用[16,17]。这些系统操作更为灵活、精细,克服了传统腹腔镜手术的一些局限性,同时实现了与传统手术相媲美的效果[1]。然而,由于达芬奇手术机器人的手术费用高昂,日常维护成本较高,其在地市级医院的推广受到了一定限制。为了实现手术机器人技术在更广泛范围内的应用,我国已成功研发了具有自主知识产权的国产手术机器人,并已开始投入实际应用。
本研究使用国产Agibot®腔镜机器人系统成功完成了3 例泌尿外科手术,3 例受试者均未发生手术中转,且未发生Clavien-Dindo≥Ⅱ级并发症。本研究的手术方式涉及根治性前列腺切除术和肾部分切除术,手术难度从中等到复杂,包含病灶切除与组织重建、性神经保留等技术。3例患者术中机器的安装时间为(6.00±2.00)min,术中估计失血量(83.33±28.87)ml。根据Fan等[18]报道机器人辅助腹腔镜根治性前列腺切除术中位估计出血量50(10~200)ml,本研究术中的失血量与此相近。同时,3 例术中均未输血,无并发症发生,手术时间为(120.00±28.93)min,患者术后疼痛评分均为轻度疼痛,住院时间为(5.00±2.00)d,对3 例患者均进行(30±5)d 随访,出院期间无异常。前列腺癌患者术后30 d 总PSA 分别为0.066 μg/L 和0.098 μg/L,均已降至正常水平。在机械臂操作过程中,操作柔顺轻巧、运行流畅,无明显停滞或延迟反馈等问题,机械臂精准安全,未出现系统及器械相关故障。相较于常规或3 D 腹腔镜,机器人具有更高的灵活性,可随时调整镜头位置及方向,从而保持操作部位清晰,提高手术效率及安全性[19]。
此外,机器人还具备以下优势:⑴手术精度提高:提供更为清晰的视野,使手术者能更准确地判断组织及血管状况,降低手术风险。⑵减小创伤:手术采用微创方式,创伤较小,患者康复速度加快,住院时间缩短。⑶降低并发症风险:手术对周围组织损伤较小,从而降低并发症发生风险。⑷术后疼痛较轻。⑸节省医疗资源:手术时间较短,对医疗设备及人力的需求相对较低,有助于节省医疗资源。
综上所述,Agibot®腔镜机器人在首次人体试验手术中表现出较高的可行性和安全性,具有较大优势,可安全有效地开展机器人辅助的泌尿外科手术。术中指标及术后结果提示手术效果良好,且患者恢复良好。然而,相比于成熟稳定的达芬奇手术机器人,国产机器人仍需进行较大样本、多中心的临床研究并对患者进行随访,以进一步验证国产腔镜机器人的效果。
