新一代飞行器导航制导与控制技术发展趋势
2024-05-13杨卫平
杨卫平
航空工业西安飞行自动控制研究所,西安 710075
制导导航与控制(Guidance Navigation and Control,GNC)是航空航天领域的重要学科,是关系到我国国家安全与国民经济发展的基础性、战略性、前沿性高新技术。根据武器装备和民用飞机技术发展的需要,最新的航空机载技术体系已将传统的飞控技术、导航技术统归到飞行器GNC 系统中,将其视作飞行器控制与管理的完整技术进行研究。一般认为,导航系统提供飞行器预定航迹、现实位置、姿态、航向和速度信息;制导系统利用导航信息和其它参考信息确定实时的导引指令(导引律);控制系统则根据驾驶员指令、制导/导航信息计算出相应的控制指令(控制律),并通过广义操纵面对飞行器的上述运动参数进行稳定和控制。因此,飞行器的GNC 系统是飞行安全和任务能力的核心关键,其功能、性能和可靠性对飞行器的飞行安全、任务效能、以及高对抗场景下的生存能力至关重要。
当前,随着体系、网络、信息成为现代战争制胜主导因素,世界各主要强国不断探索新概念、新技术、新理论在航空装备研制与应用方面的创新实践[1],催生出以分布式作战、联合协同作战、马赛克战等为代表的新型作战样式和新质作战能力[2-3]。面向未来“海陆空天电磁”全域网络化、体系化、智能化发展趋势,航空飞行器在能力上的跨代升级应突破传统时空认知界限,实现全时、全域信息的实时感知、处理和分发,形成多维时空域平台与资源的协同控制能力,支撑人类从使用者加速转变为指挥者,由机器自主地甚至创造性地完成任务,最有效发挥人类的目的和意图[4]。新质作战样式的出现对航空机载系统相关产品和技术带来了强劲的需求和牵引。在此大背景下,新一代飞行器GNC 系统呈现出综合化、信息化、智能化的趋势,并以“精确”和“自主”为核心特征,突出相关系统在对称性战争的强对抗任务场景下应具备高可靠、高安全能力。其中,“精确”的内涵是飞行器要在强电磁干扰战场环境和作战任务中精准定位、精确到达、精确机动、高效协同;“自主”的内涵是飞行器要在强对抗环境中不受敌方和外部干扰、不依赖外部信息,自主导航、自主决策,遂行高动态作战任务。GNC技术发展将加速由“传统分立系统独立发展”转变为“GNC 与计算、通信深度融合一体化发展”模式,以适应航空装备在人机混合协同任务场景下的新质能力需求。
1 国外GNC 技术发展现状
典型的GNC 系统功能架构如图1 飞行器GNC 系统功能架构所示,GNC 系统是实现飞行器姿态稳定控制、高精度位置解算、速度和航路运动自主规划的重要核心系统。
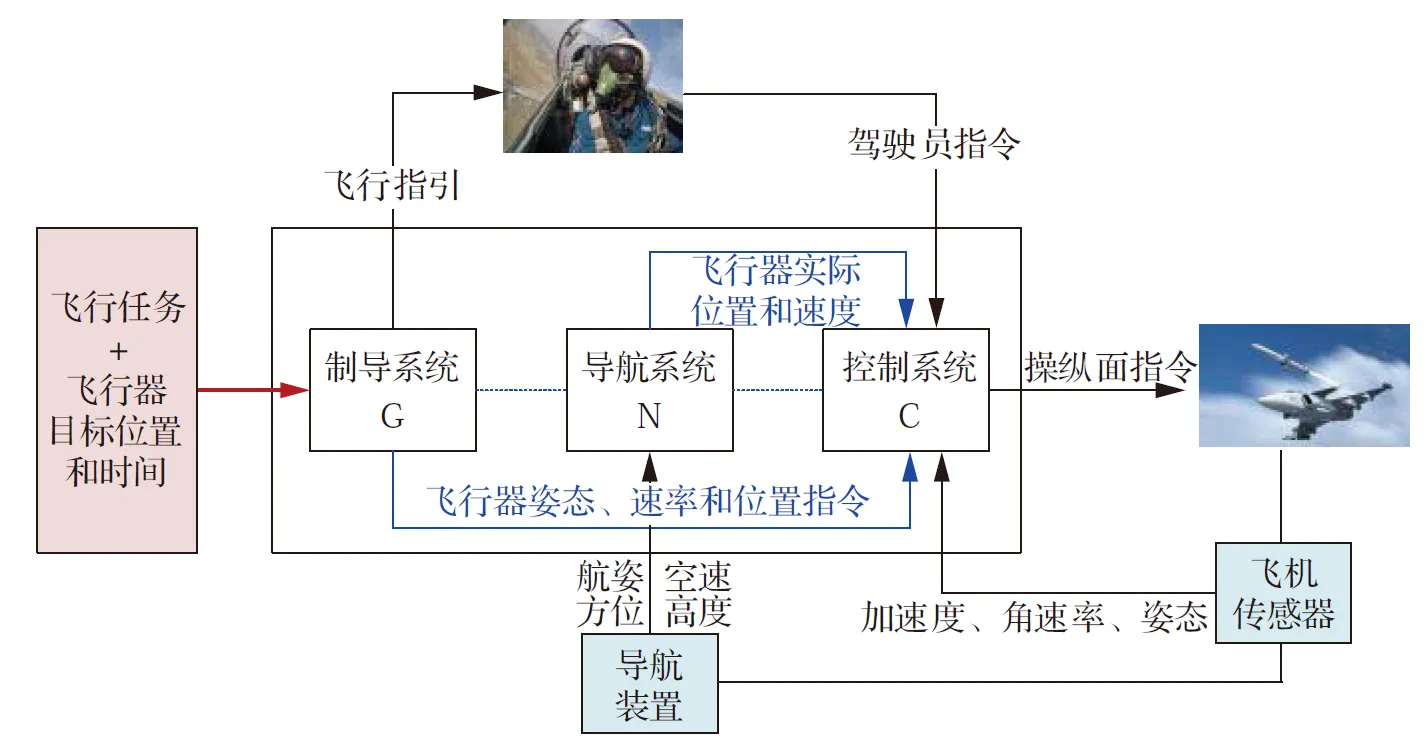
图1 飞行器GNC 系统功能架构示意图Fig.1 Schematic diagram of functional architecture of GNC system of aircraft
GNC 技术与军事需求关系密切,世界各发达国家在该领域具有深厚的理论和工程积淀,且持续保持深化研究态势。美国空军将高可靠、抗干扰、高自主的GNC 能力视作装备在复杂任务场景下维持作战效能的核心能力,并在“技术地平线”报告中将自主系统、自主推理、复杂自适应系统、合作/协同控制、自主任务规划、冷原子惯性导航等16 项GNC 技术位列110 个关键技术中的最高优先级[5-6];以美国国防部高级研究计划局(Defense Advanced Research Project Agency,DARPA)为代表,各主要国家均在GNC 领域加速推进各项前沿技术研究项目,不断提升导航系统与飞行控制系统的综合化、集成化水平[7-8]。与此同时,各国也通过军方、国防部、科技部等渠道加强规划的执行和落地,广泛布局传感测量,导航应用、先进制导、核心器件等技术研究,取得了一系列成果[9],如表1 所示。
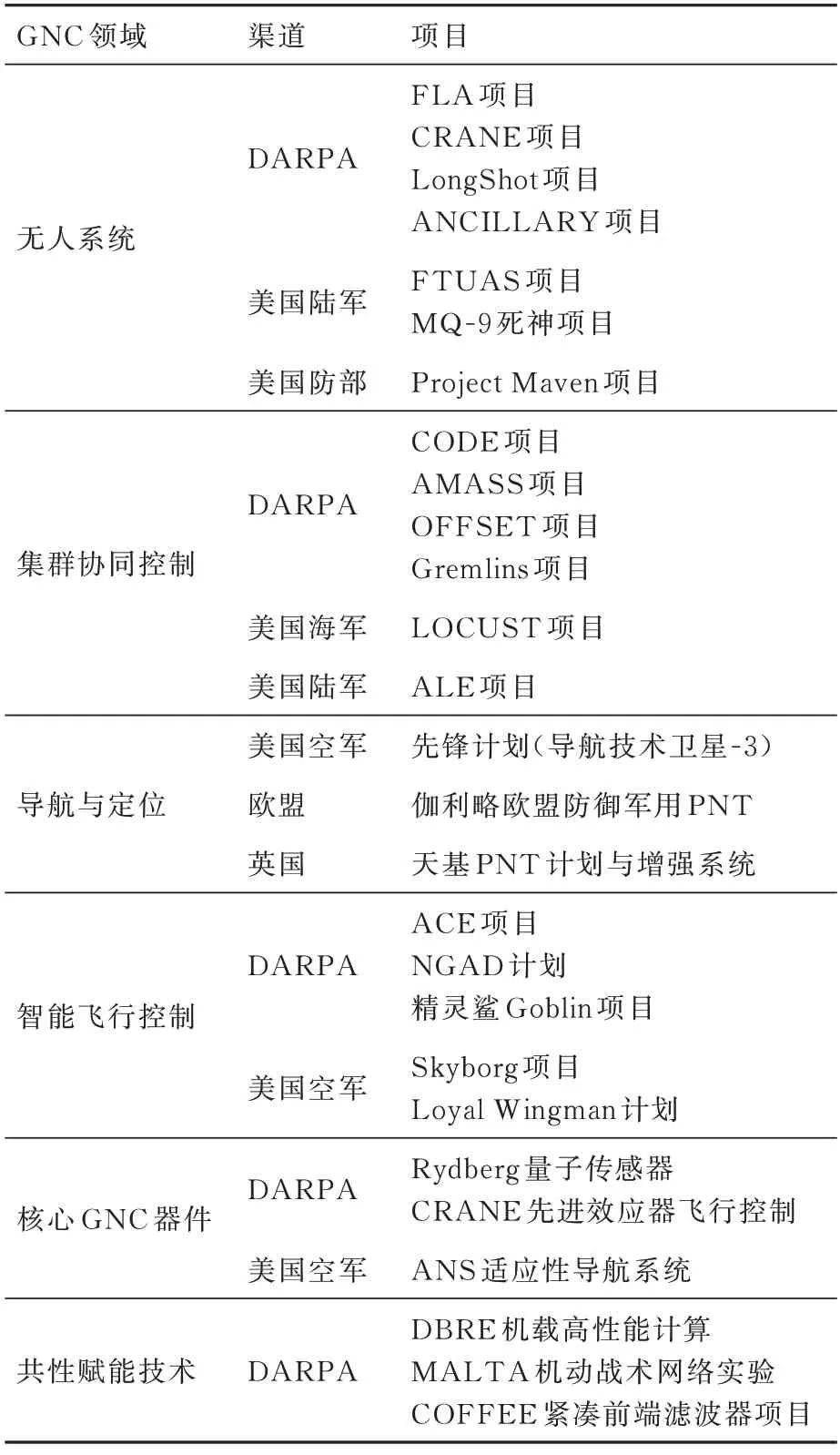
表1 国外在GNC 领域支持推进的重点项目Table 1 List of typical projects in GNC field abroad
1.1 惯性导航技术
惯性导航技术是一种通过测量飞行器的加速度和角速度,并自动进行积分运算,获得飞行器瞬时姿态、瞬时速度和瞬时位置数据的技术[10]。它是一种自主式导航系统,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰。惯性导航系统的设备都安装在运载体内,主要包括惯性元件(加速度计和陀螺仪)和积分运算器等部分,通过测量惯性元件的加速度和角速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的目的。国外惯性导航技术的研究可以追溯到20 世纪初,其发展经历了多个阶段[11-12]。
第1 阶段是早期的陀螺仪和加速度计的研发,这期间研发的陀螺仪主要利用了转轴的定轴性原理,加速度计则通过测量加速度来进行积分运算得到位置信息;第2 阶段是以牛顿定律为核心的惯性导航系统的研究;这期间出现了许多经典的惯性导航系统,如陀螺仪、加速度计等,这些惯性导航系统的工作原理是基于牛顿力学定律进行积分运算得到位置信息;第3 阶段是惯性导航技术的快速发展和应用,这期间惯性导航技术开始广泛应用于航空航天和军事等领域,同时各种新型的惯性导航系统和技术也不断涌现,如激光陀螺仪、光纤陀螺仪、微机电系统(Micro-Electro-Mechanical System,MEMS)陀螺仪等。
目前,惯性导航技术已经发展到了第4 阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。未来,惯性导航技术的发展方向主要有以下几个方向:首先是提高精度,这是惯性导航技术发展的一个重要方向,通过采用更先进的惯性传感器(如冷原子陀螺等)和算法,提高惯性导航系统的精度,以满足各种高精度导航的需求;其次是降低成本,随着科技的发展和应用领域的扩大,惯性导航系统的成本已经成为制约其应用的一个重要因素,因此降低惯性导航系统的成本成为了一个重要的研究方向;最后是实现小型化和集成化,随着微电子技术和微机械技术的发展,惯性传感器的小型化和集成化已经成为了可能,未来惯性传感器将会更加小型化和集成化,从而使得惯性导航系统更加紧凑和便携。
从典型产品来看,西方发达国家的光学捷联系统已经进入全面应用阶段,累计生产了上万套产品。标准级光学惯性导航系统的典型产品有Honeywell 公司基于激光陀螺GG1342 及GG1320的H423、H764G[13-14],Northrop Grumman 公 司基于ZLG 零锁区激光陀螺的LN100F、LN100G,Northrop Grumman 公司基于光纤陀螺的LN251、LN260 等。同时,光纤捷联航姿系统已成为支线飞机的主要装备产品,其抗过载能力、可靠性和寿命远远高于挠性陀螺的系统。标准级导航系统的纯惯性指标一直维持在1.48 km/h(圆概率误差,Circular Error Probable,CEP,第1飞行小时)、0.8 m/s(均方根,Root Mean Square,RMS)的精度。在标准级导航系统基础上,美国等军事强国通过器件、系统技术的不断进步,发展了精密级导航系统,纯惯性导航精度为0.19~0.38 km/h(CEP,第1 飞行小时)。表2 所示为当前国际上典型的惯性导航产品。

表2 国外典型的惯性导航产品Table 2 Typical foreign inertial navigation products
1.2 卫星导航技术
卫星导航技术作为现代科技的璀璨明星,已在全球范围内得到了广泛应用。国外卫星导航技术发展尤为突出,美国全球定位系统(Global Position System,GPS)、欧洲的伽利略卫星导航系统(Galileo)和俄罗斯的格洛纳斯卫星导航系统(Global Navigation Satellite System,GLONASS)都是具有代表性的卫星导航系统[15-16]。
GPS 自1978 年开始部署,由24 颗卫星组成,是全球最大的卫星导航系统。GPS 具有高精度、全天候、全球覆盖等特点,被广泛应用于军事、民用等领域。在民用方面,GPS 用于智能手机、车载导航、无人机等设备,为人们提供了精确的位置服务。同时,GPS 在国际市场上也占据主导地位,成为许多国家卫星导航系统的重要组成部分。1996 年美国宣布实施跨度为10 年的GPS 现代化计划,其目的是更新GPS 军民用信号特征和整体性能、确保在提供GPS 全球服务和GNSS 全球应用上的领先地位[17-18]。在GPS 现代化专项计划中,重点是形成军事应用能力,计划“2020 年要将M 码送到战斗员的手中”,并一直持续不断地实施军用GPS 用户设备(Military GPS User Equipment,MGUE)增量计划。
Galileo 是欧盟为摆脱对美国GPS 的依赖、打破其垄断,于1999 年开始实施的卫星导航系统计划。它由30 颗卫星组成,是欧洲自主、独立的卫星导航系统。Galileo 系统拥有高精度、高可靠性和高抗干扰能力等特点,为欧洲及全球用户提供了高质量的位置服务[19]。
GLONASS 在经历前苏联解体、俄罗斯经济不景气等20 多年的曲折发展历程后仍然存活下来,由24 颗卫星组成,是俄罗斯自主研发的卫星导航系统,目前也在着手进行现代化更新,确保其军事价值[20]。GLONASS 系统在国际市场上占据一定的地位,尤其在独联体国家范围内具有较高的影响力[21-22]。
1.3 光电导航技术
机载光电导航是指利用安装在飞机上的光电传感器观测地面景象、目标(如跑道、空中目标等),并利用景象、目标包含的先验地理信息来实现载机定位与导航的一类技术[23]。在绝对导航方面,景象匹配导航最具代表性[24]。自2000 年以后,美军从传统的定位、导航,到强化时空体的概念,自主导航从解决定位、导航问题扩展至解决定位导航与授时(Position Navigation and Time,PNT)问题,图像导航作为一种重要的自主导航信息源与精密惯性星光导航等手段并列为未来导航的主要方向[25]。在装备研制方面,HONEYWELL公司于2020 年在阿古斯塔维斯特兰公司的AW139 直升机上对景象匹配导航系统进行了试飞验证,系统计划于2022 年上市,2023 年开始交付用户。同时期,波音公司也于2020 年进行了多源导航系统的试飞验证工作,其中景象匹配导航作为重要的自主导航手段进行了系统性的验证。在相对导航技术方面,利用高精度视觉测量技术,X-47B 完成了自主空加油近距离对接段对锥套的捕获、识别、跟踪、定位,实现了无人机自主对接加油。GE 公司研制了激光光场导航系统,实现了对一定空域的激光覆盖,进而对目标进行相对定位与编码通信,是自主加油着陆/舰场景下的新型导航手段[26]。
1.4 仿生导航技术
仿生导航是对自然界不同动物利用自然地理条件和自身导航特性来进行导航定位的原理进行研究,并设计一种仿生导航传感器来实现导航的一种新型导航技术[27]。近年来,随着生物学和人工智能技术的发展,认知导航和仿生智能导航取得了明显的进步,谷歌DeepMind 在民用领域已取得一定进展。仿生导航及仿生物编队技术也逐渐被国外从事导航研究的大学、机构或公司所重视,相关研究工作在不同程度上受到各国航天部门或军方的支持。“仿生导航新体制”能够实现无人机从“风筝”到“候鸟”的智能升级,“机器群智能理论”则使机群能够从“木偶戏”到“自导自演”的角色转变。在导航定位细胞方面,美国科学家O’Keffe 和瑞典科学家Moser 发现了组成大脑“GPS”系统的导航定位细胞,并获得了2014 年诺贝尔生理学或医学奖。2015 年美国国防部高级研究计划局正式启动FLA(Fast Light weight Autonomy)项目,该项目通过研究鸟和飞行昆虫的仿生导航机理,力图使微小型无人机系统能够在无GPS 导航和通信链路支持的条件下,具备20 m/s 自主飞行导航能力,2017 年7 月完成第一阶段的飞行试验。2023 年,美国空军将传统的磁导航概念与人工智能相结合,在C-17A 飞机上完成了实时磁导航定位试验,实现了公里级的导航定位精度。2023 年美国北极星公司推出了SkyPASS Gen3-N 产品,通过测量大气偏振态和太阳方位角,在动态条件下实现了航向角优于0.23°的解算能力。
1.5 多源导航信息融合技术
多源导航信息融合技术利用不同传感器之间信息的冗余和特性的互补,通过优化或估计等信息融合算法对各类导航信息进行融合,形成对于飞机导航信息的全局一致最优估计,并能实时对传感器数据异常进行检测隔离,且实时对估计结果的性能特性进行评估[28]。根据所提供的导航信息,导航信息融合技术分为绝对导航信息融合、相对导航信息融合以及分布式导航信息融合三大类。
在绝对导航融合方面,随着导航传感器资源的不断丰富,种类繁多、参数各异的导航信息给飞行员造成了越来越大的信息处理负担,因此需要在应用服务层对导航信息进行融合处理,为飞行员提供全局一致的导航信息[29-30]。在F-35 飞机上,基于卡尔曼滤波技术的导航信息融合算法已实现应用。B-2A 飞机导航系统不仅可融合外部卫星信息、多普勒测速仪、雷达测量、高度表测量等数据,同时也可以与另外一套惯性/天文组合系统的测量信息进行组合。目前美军正在开展基于概率因子图和概率推理方法的全源导航融合算法研究,旨在促使信息融合通用化模块化,实现即插即用的装备能力[31]。该研究已经在美空军演示验证项目中完成试飞验证评估,定位精度达到10 m 量级[32]。
相对导航融合方面,当前自主空中加油、紧编队飞行、精密全自动着舰依赖于精确的卫星相对导航技术[33-34]。在卫星导航系统的辅助下,X-47B 完成了自主着舰和自主空中加油试验。针对上星拒止、甚至射频拒止环境下的自主相对导航技术,GE 公司研制了空中加油激光导航系统,并不依赖于GPS 系统,仅依靠激光定位技术和数据链系统就解决了无人机自主空中加油的精确对接问题,因此其抗电磁干扰性能优异[35-36]。
分布式导航融合方面,从20 世纪90 年代初开始,美军就开始重视对机载分布式导航系统技术的关注和研究,其中的系统架构、信息融合策略、挠曲形变估计与补偿、动态任务传感器对准等相关技术的研究成果均表明机体结构、航电传感器和任务设备、武器系统性能之间存在着相互依赖关系,对整机作战效能具有重要意义。在存在挠曲和振动的实际飞行验证中,横滚角、俯仰角、航向角的对准精度均满足预期的1 mrad 设计指标,相对位置精度达到了预期的3 cm 精度目标。
1.6 飞行管理技术
飞行管理技术(Flight Management Technology,FMT)是指利用计算机、导航、通信等设备和程序,通过预先编程的飞行计划和实时决策,实现飞机自动驾驶、自动导航和自动控制的技术,包括飞行计划、导航管理、控制和监视等功能[37]。飞行计划功能根据飞行要求生成飞行计划,并考虑飞机性能、气象条件、机场设施等因素,进行优化设计。导航管理功能通过接收和处理各种导航信息,包括惯性导航、无线电导航、卫星导航等,为飞行提供准确的定位和引导。控制功能是指通过自动驾驶仪和飞行指引系统等设备,实现飞机的自动控制和稳定。监视功能则通过各种传感器和监视设备,实时监测飞机位置、速度、姿态等参数,以及气象条件和空中交通状况等,确保飞行安全。
自20 世纪90 年代以来,飞行管理系统(Flight Management Syetem,FMS)已逐步实现了四维导航能力,并将四维导航引导算法集成到飞行管理系统的性能管理功能中,涵盖了起飞、爬升、巡航、下降、进近、自动着陆等飞行过程。同时,通过使用闭环控制,到达机场时间的误差从1~2 min 级降低到了秒级。此外,随着航空电子系统的高度综合与集成,飞行管理系统已逐步集成为一个高度复杂的软件功能,并驻留在集成模块化航空电子(Integrated Modular Avionics,IMA)平台中。为应对日益增长的空中交通流量,国际民航组织提出了未来空中导航系统(Future Air Navigation System,FANS)的概念,该系统集成了通信、导航、监视及空中交通管理。作为FANS 系统下的重要航空电子系统,飞行管理系统受到了欧美等航电设备供应商的广泛关注。他们已对此开发出了满足FANS 功能要求的飞行管理系统,这类系统具备数据链空地协同、场面引导、四维航迹精确控制等满足新航行体系的关键技术,目前主流的波音、空客飞机均安装有该类飞行管理系统。
1.7 先进制导与控制律
在制导与控制领域,目前国外以飞行控制功能为中心,以提高整机作战效能为目标[38],将各种与飞行相关的部组件和功能进行综合设计,构成飞行器管理系统,并实现综合飞行控制[39]。如:将飞行控制与发动机控制的功能综合,形成推力矢量控制等,从而满足飞行器高机动性和敏捷性要求,实现过失速机动和无忧虑操纵,提高系统的任务可靠性;将系统功能和物理综合,实现对飞行器系统的综合控制、决策管理、资源配置和诊断监测,提供故障预测与健康管理[40],提高自主式后勤保障能力。在新技术方法方面,先进控制理论诸如动态逆控制[41]、L1 自适应控制[42]也已实现了工程应用;创新效应面的研究已进入试飞阶段,射流控制已实现无人机首飞[43-45],表明其技术成熟度已得到明显提高;在智能控制方面,美国的X-62A 无人驾驶飞机的成功飞行,证明人工智能(Artificical Intelligence,AI)在代替人类飞行员执行飞行器自主控制方面已获得突破性应用。面向复杂任务需求,基于开放式架构,国外的先进飞行控制系统将向高度自动化、综合化、智能化及体系化方向发展。
1.8 GNC 核心器件
在核心器件领域,欧美国家在新型传感器、高效作动部件上持续创新。美国Northrop Grumman 公司从2005 年到2012 年历时8 年,实现世界上体积最小的导航级陀螺,体积10 cm3,精度0.01(°)/h[46],2017 年,该公司研制出基于核磁共振陀螺的量子惯性导航系统(系统体积200 cm3,精度1.852 km/h,配置MEMS 加计),在空军T-6B 教练机和海军“猎户座”反潜巡逻机上进行了独立测试;法国巴黎天文台的Landragin小组研制成功冷原子陀螺仪样机,零偏稳定性6.2×10-5(°)/h,采样率为3.75,有待提高[47];UC Berkeley 分校成功研制Φ6×60 cm3,灵敏度37 μGal/Hz1/2的冷原子重力仪[48],法国Muquans公司原子重力仪表头体积∅38×70 cm3,静态灵敏度50 μGal/Hz1/2,长期稳定性优于1 μGal;法 国Safran 公司半球谐振陀螺精度0.000 1(°)/h;美国密西根大学微半球谐振陀螺精度优于0.01(°)/h;美国波音公司谐振环MEMS陀螺精度0.012(°)/h。作动部件方向上,美国已构建42 MPa/540 V 直流高压作动体系,实现了多源异构作动能量优化,突破高功重比电机、智能灵巧控制器等关键作动部件技术,并成功应用于F-35、A380 等平台;美国国家航空航天局(National Aeronautics and Space Administration,NASA)、波音、空客近年在变形机翼、柔性蒙皮等变体飞机作动控制技术方面取得显著突破,已相继完成试飞验证。欧洲将六相容错电机用于Vega-C 火箭推力矢量控制系统的机电作动器中,其输出功率达30 kW,电机采用分数槽集中绕组,以抑制绕组故障蔓延,驱动器采用H桥拓扑,实现绕组之间的电隔离,出现故障时,切除故障相绕组,重构剩余正常相绕组电流实现系统的容错运行[49],英国纽卡斯尔大学为航空燃油泵设计了8 槽6 极四相永磁容错电机,针对电机损耗大的问题,研究了不等齿宽定子铁芯结构[50-51],并研制出100 kW 容错电机;英国谢菲尔德大学为罗罗发动机公司研制了3×三相内嵌式V 形转子永磁辅助同步磁阻电机,电机最高转速19 200 r/min、额定功率35 kW,并对比了电机正常工作、短路故障时的电磁转矩输出性能,试验表明,该电机具备良好的匝间、相间短路抑制能力[52]。
此外,依托cFS(NASA)、FACE(美国海军)、CODE(美国空军)等项目,欧美国家加强了面向分布式综合模块化研发的新一代智能系统控制、决策与协同技术研究,加速完善以人工智能算法应用为核心的软硬件设施建设,为GNC技术跨代发展和颠覆性创新提供条件支撑。
2 中国技术发展现状与差距
2.1 发展现状
近年来,国内以研究所和高校为代表,围绕多种先进飞行器研发,持续推进各项研究和工程实践,在部分技术领域已比肩世界一流水平,获得了长足的进步。
在导航技术方面,国内已基本形成了一定规模的研发生产能力,拥有一批国家级、省部级和行业级实验室,研制出了面向各类平台和应用场景的,具有自主知识产权的传感器及系统。
在惯性导航技术方面,西方发达国家把惯性技术作为高度保密的军用核心技术,禁止向中国出口和转让。从核心器件的类型发展来看,中国的惯性导航技术研究也经历了从传统机械式陀螺(静电陀螺、动力调谐陀螺)到光学陀螺(激光陀螺、光纤陀螺)、MEMS 传感器的发展历程,并且正在朝下一代核磁共振陀螺以及冷原子陀螺探索发展。
在卫星导航技术方面,中国自主建设的北斗卫星导航系统,自1994 年北斗一号立项以来,历经26 年,实现了从无到有、从有源到无源、从区域到全球,现已成为国家重大空间基础设施,为军用和民用提供了不可或缺的导航保障。如图2 所示,目前中国的北斗卫星导航系统位置精度因子(Position Dilution of Precision,PDOP)性能跟其余三大主流导航系统表现趋同,在亚太地区其精度甚至高于GPS。

图2 四大卫星导航系统星座平均PDOP 值(2022-01-01)Fig.2 Average PDOP values of four major satellite navigation system constellations(2022-01-01)
在光电导航技术方面,得益于近几年民用无人机、智能驾驶汽车等领域的发展,与之相关的光电传感器技术、信息提取技术及导航应用技术研究发展迅速。在光电传感方面,国内从事研究和生产航空光电吊舱的各类企业主要有航空工业613 所、兵器工业205 所等。光电吊舱的主要功能还是面向搜索、探测、监视等任务,导航并不是其核心功能,然而这些光电吊舱所提供的光电测量信息可应用于导航。在后端应用方面,航空工业自控所以自主空中加油、自主着陆任务为牵引,充分利用人工智能技术在视觉图像、激光雷达点云处理领域的成果,开展智能"端到端"相对定位技术研究。联合西北工业大学电子信息学院,设计了深度学习网络模型,实现了对无合作标志目标的高精度定位问题,支撑了视觉导航技术在自主空中加油领域的应用。针对视觉自主着陆引导技术,联合西北工业大学翟正军团队,解决了跑道高精度识别与特征提取问题,并构造惯性/视觉深组合模型,支撑了无人机视觉着陆引导。
在仿生导航技术方面,随着仿生传感器不断成熟、人工智能加速融合,相关成果在航空机载任务场景中的应用模式在不断创新。目前,国内仿生导航的主要研究目标是提升各类运动体在卫星导航信号拒止环境下的自主导航能力,主要手段是综合利用几何空间内的导航信息与拓扑空间内的导航经验知识、导航拓扑空间关键节点的引导指令等,从而得到面向任务的导航指令集,按模式引导载体运动,在多个不同类型的仿生导航传感器中进行数据融合,以混合式仿生导航系统形态确保导航精度。大连理工大学Chu 等[53]提出了模仿昆虫偏振光敏感单元的改进型仿生光罗盘定向算法;国防科技大学Hu 等[54]研制了六通道点测式仿生光罗盘和基于相机的面测量式仿生光罗盘,并对多传感器融合组合导航方法进行了深入研究;沈阳理工大学的郝永平等[55]提出了新一代小体积、大视角仿生复眼结构;北京航空航天大学余翔等[56]受昆虫复眼启发将偏振光导航与地磁导航、惯性导航等结合,突破了复杂光学环境下仿生自适应偏振导航传感、仿生多传感器三维空间复合干扰滤波、高动态仿生自主组合导航系统智能触发设计与优化等关键技术,完成了多型仿生组合导航样机研制,经固定翼无人机和高超飞行器飞行验证,系统航向精度可优于0.1°。航空工业自控所针对拒止环境下轻小型、低成本平台的导航问题,联合外界高校等团队在仿生导航技术领域开展了广泛的交流和合作:针对偏振视觉导航技术,联合国防科技大学智能科学学院完成了自由曲面仿生偏振光样机研制;针对偏振定向技术,联合大连理工大学褚金奎团队完成了偏振定向技术在机载导航领域应用的论证及测试工作,推动了仿生偏振光导航在航空机载领域的设计及应用。
在多源导航信息融合方面,国内着眼飞机多用途、任务多样化的导航需求,开展导航性能故障检测、着陆/着舰相对导航技术和分布式导航技术研究。针对导航态势环境建模需求,开展基于知识图谱的面向高可靠导航的环境知识提取与表达方法研究,聚焦飞机导航系统难以精确建模、电波信息传递易受干扰等导致可靠性降低的关键问题,构建PNT 系统与环境等外在因素的联系,实现地标/目标识别与分析,以及对物理系统的PNT 相关态势和知识表示,建立了导航知识库,并实现了地标/目标的准确识别。针对自动着陆/着舰需求,参考美军舰载机自动着舰规范,针对美军自动着舰系统(Automatic Carrier Landing System,ACLS)和联合精密进近与着陆系统(Joint Precision Approach and Landing System,JPALS)两类着舰导引系统以及法国光电导航引导系统,从飞机着舰精度和飞行安全性角度出发,提出全自动着舰过程(包括复飞阶段)的运行程序和导引信号的指标体系和指标要求,并从系统组成、指标、环境适应性、运行程序复杂性等方面对比分析导引体制的优缺点;分析着舰过程影响因素,提出针对不同因素的技术解决途径和方法;分析 ALCS 系统雷达原始测量(斜距、方位角、俯仰角)的误差模型,针对基于 GPS 和北斗卫星导航系统(Beidou Navigation Satellite System,BDS)的JPALS 系统,完成着舰点估计、飞行路径定义和导引指令计算的设计和仿真分析。解决了舰载机全自动着舰的飞行路径定义,引导算法设计和误差分配计算等工程问题。针对分布式导航技术,对机体典型结构形变模型分析技术研究,通过对飞机典型机体结构的建模分析,给出机体结构形变的模型和特征参数,如传递函数(计算公式)、模态、频率,开展飞机在静态、爬升、巡航、俯冲拉起、武器投放、下降等飞行状态中荷载作用下的振动(Vibration)、结构挠曲(Structural Bending)的分析计算,解决了分布式导航技术机载适用性评价、滤波器参数优化、精度评估等方面的难题[57]。
在飞行管理技术方面,中国科研院所针对所需导航性能(Required Navigation Perfermance,RNP)导航与完好性监测技术,开展基于性能的导 航(Performance Based Navigation,PBN)和RNP 技术研究,针对 RNP 导航指标分解的难题,开展建模与仿真评估方法研究,并完成了飞行仿真验证。同时还开展了民机大气惯性完好性监测工程应用技术的合作研究,解决了多余度ADIRS 传感器级、子系统级、系统级完好性监测算法及工程应用模块研制,并完成了飞行仿真验证。针对飞行引导与推力管理技术,解决了面向RNP AR 需求的水平及垂直引导算法设计;通过“垂直引导及推力管理技术”研究,完成了某型运输机垂直引导方案设计,解决了垂直引导和升力补偿的难题。针对直升机战术飞行管理技术,开展了着陆场识别技术研究,解决了直升机着陆场智能识别与最优着陆场规划的模块设计,达到支撑仿真验证的程度;完成航路规划技术研究,解决了直升机贴地飞行航路规划与动态重规划模块设计,并完成仿真验证,达到支撑产品研制的程度[58]。
在制导与控制技术方面,数字电传飞控技术已成为国内新型飞机的标配,其设计与验证已得到成熟应用,大幅提升了飞行器的机动性能和飞行品质;光传飞控技术在国内经过30 余年的研究,局部光传控制技术已被掌握,新一代光传飞控系统已经成功试飞,减轻了机身重量,提高了抗电磁干扰能力[59]。图3 所示为新一代光传飞控系统架构示意图,其中,REU 表示远程电子组件。
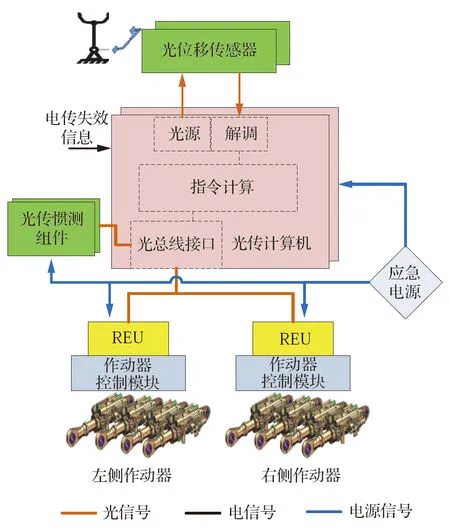
图3 光传飞控系统架构Fig.3 Optical flight control system architecture
在系统架构设计上,基本突破了基于总线的分布式体系架构设计技术,研制出分布式综合飞行控制系统,并采用多余度/非相似余度软硬件配置与管理,显著提高了系统的可靠性[60]。图4所示为基于时间触发总线网络的分布式系统架构示意图。
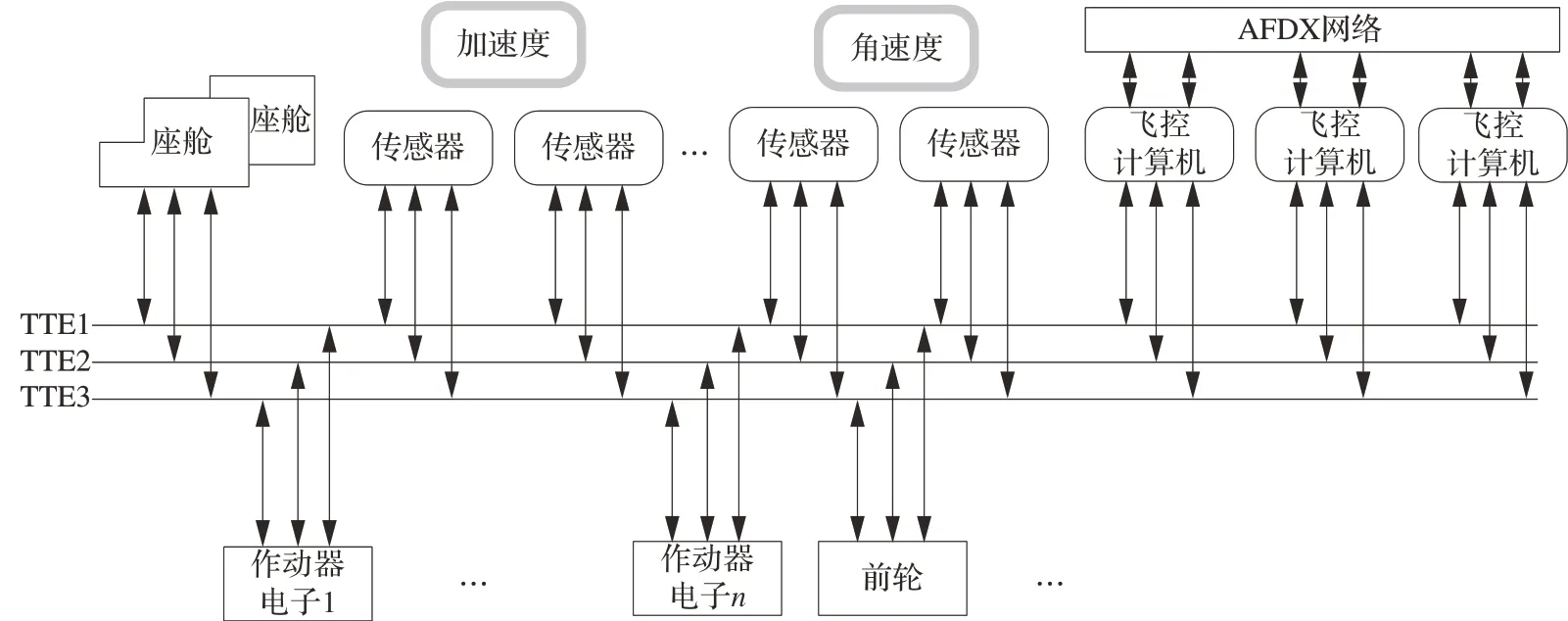
图4 基于时间触发总线网络的分布式系统Fig.4 Time triggered bus network distributed system
在综合控制方面,国内已掌握多操纵面综合控制技术和最优分配技术,相继实现了大型飞机多操纵面的协调控制管理[61];飞行器综合飞行/推力控制一体化系统的工程应用。通过将飞行控制与飞行器动力控制融为一体,显著提高了飞行性能,扩大了飞行包线[62]。图5 为典型的飞行器飞控系统与发动机一体化控制结构图。

图5 飞发一体化控制结构图Fig.5 Structure diagram of aircraft-engine design
在先进飞控部件技术方面,突破关键总线部件技术,提供高可靠传输能力[63];研制射流管伺服阀,提高耐油液污染能力,降低相关子系统故障率,提高使用寿命;直接驱动阀式作动器已实现工程应用,降低了静态泄露,提高作动器可靠性[64];串行背板总线计算机技术也已得到工程验证,提高了计算性能和可扩展性。在控制律设计上,多模型解耦控制策略实现了工程应用,解决强轴间耦合难题;受损情况下的飞行器自适应重构控制技术已获得缩比试飞验证。
此外,以西北工业大学、航天科技集团九院13 所等为代表的国内优势单位依托各类基金和纵向渠道项目支持,通过加强与科研院所等机构合作,显著加速了基础研究成果的转化与应用。
表3 列出了导航与传感领域的优势单位。其中,国防科技大学、北京航空航天大学在高精度惯性导航方向有较强研究实力和基础;北京航空航天大学(航天)、航天科工集团三院33 所(弹载)、北京理工大学(陆用)在组合导航系统研制方向具有较强实力和特色;中船重工集团717 所在面向航海的天文/惯性组合导航方向处于领先水平;在惯性传感器研制领域,国内多家高校和研究所均率先布局了量子、半球等先进惯性传感器研制,技术路线各不相同,整体处于快速追赶国外先进水平的阶段。

表3 导航与传感领域国内优势单位Table 3 Advantageous institutes in field of navigation and sensing in China
在控制与作动领域,北京航空航天大学、西北工业大学等高校在飞行器控制方向上积累了丰富的理论和算法成果,并依托轻小型无人飞行器开展了一系列技术验证;航空工业沈阳飞机设计研究所、成都飞机设计研究所等主机单位在平台飞行控制算法开发以及总体设计集成方向已具备相当实力;航空工业机载系统研制单位在伺服作动方向上主要以液压作动产品研发为主,航天相关单位主要以短时间、抗辐射、大功率伺服作动产品研发为主,如表4 所示。
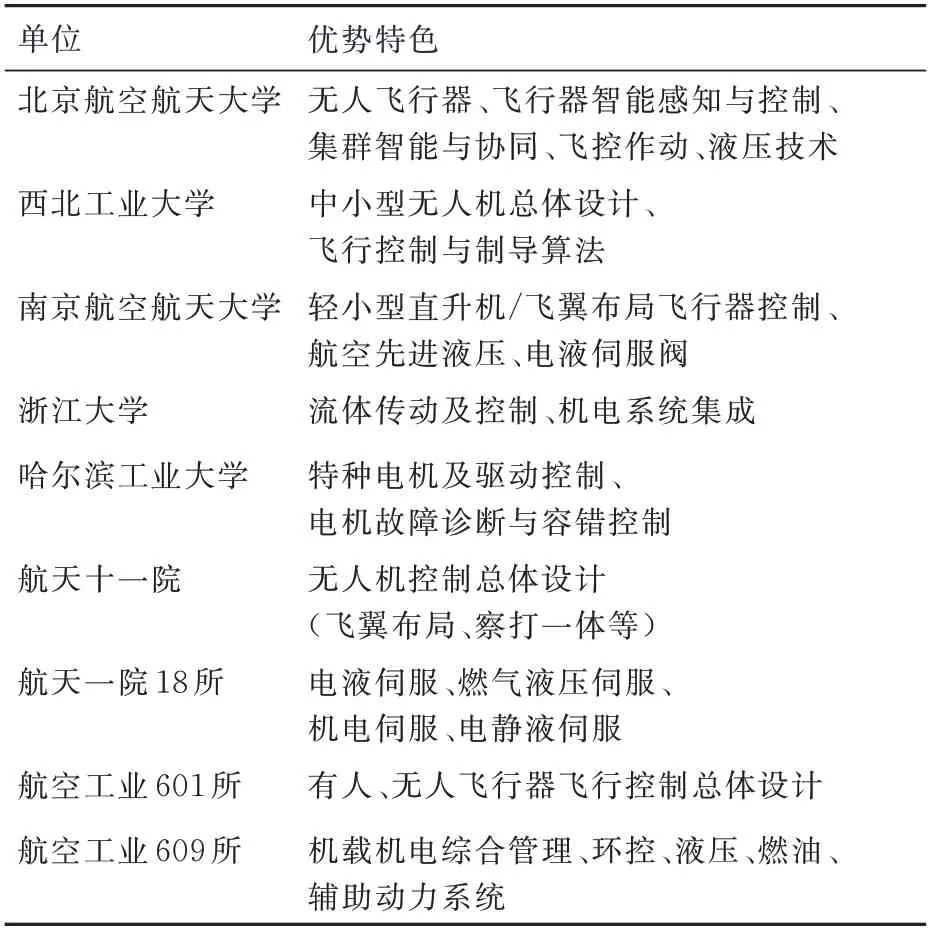
表4 控制与作动领域国内优势单位Table 4 Advantageous institutes in field of control and actuation in China
2.2 差距分析
尽管中国目前在GNC 技术上进步显著,但从整体技术实力和工业化水平上来看,与国外仍存在差距,主要体现在应对飞行器长航时、大航程、大包线、高动态、不稳定、多耦合、不确定、强干扰等挑战上。
在导航领域,惯性/卫星组合导航系统在抗干扰和防欺骗方面仍有待提高,系统的完好性水平也需要进一步完善。尽管这种系统已经得到了广泛应用,但在面对复杂环境和恶劣条件时,其性能可能会受到影响。因此,需要针对这些不足进行深入研究,提高系统的可靠性和适应性。其次,导航综合服务也需要快速发展。对于不依赖于卫星的高精度自主导航性能和成熟度,面向体系作战的跨域/跨平台导航能力以及在复杂对抗环境下的导航能力,需要进行全面提升。这些能力的提升可以进一步提高导航系统的可靠性和精度,以满足不同场景和作战需求。此外,基于量子传感器的新型导航、仿生智能导航等颠覆性战略前沿导航技术已经成为了研究热点。虽然这些技术在理论上具有很高的前景,但在实际应用中仍需进一步研究和发展。目前,这些技术还处于先期理论研究阶段,距离关键技术突破和工程应用还有很大的差距。因此,需要加大投入力度,加强研发力度,推动这些技术的快速发展和应用。综上所述,导航专业的发展仍面临着一些具体的差距和挑战。为了更好地满足不同场景和作战需求,需要不断加强技术研究和创新,提高系统的可靠性和精度,推动导航技术的快速发展和应用。同时,也需要加大对新型导航技术的研究力度,积极推动这些颠覆性战略前沿技术的研发和应用进程。
在制导与控制领域,国外在现代控制理论工程应用上已有成熟型号案例,也在X 系列验证机上开展了先进控制算法的试飞验证。美国的F-35 采用非线性动态逆控制架构,提高飞行性能,减轻飞行员驾驶负担,在进近模式使用直接升力控制,改善着陆精度。2016 年,针对空气动力变化、舵效损失等情况,基于L1 自适应控制在Air-STAR 通用缩比飞机上完成了飞行验证,这也是L1 自适应控制首次完成飞行测试。中国在自适应控制技术工程化应用方面尚处于缩比试飞验证阶段,距离成熟的工程应用还有一定差距。此外,针对不同平台和新型任务需求,在控制功能方面中国与国外先进技术相比,在技术成熟度上差距较大。波音空客的机型上均已成熟应用阵风减缓、机动载荷减缓等主动控制技术改善乘坐品质。国外对于非常规布局飞行器已采用总体控制综合一体化设计思路,确保飞行器性能利用最大化。美国已完成无人机自主着舰和自主加油,有人/无人协同作战试验也已开展,无人自主等级提升走在前列。总体来说,与国外相比,国内飞行控制系统在系统功能完备性,架构自身开放性、可拓展性及性能稳定性等方面仍有较大差距。
在核心器件领域,国内量子传感器起步相比国外较晚,受限于应用牵引力度不够、基础原材料/器件及高性能测控系统等方面基础薄弱等因素,超高精度/微小体积量子传感器性能还存在部分欠缺,技术成熟度低,产业化尚处于起步阶段,在整机集成和实际应用方面进展缓慢,总体成熟度不高,工程化水平有待提高。伺服作动方向在全电、多电作动产品谱系化发展、整机功重比、能效管理等方面存在较大差距。适应宽域自适应高效飞行的作动技术不成熟,新型智能变体作动技术基础薄弱。作动执行元件电机的电压等级、功率等级、功重比较低,新结构、新材料、新工艺的应用不足。在可靠性提升方面,针对绕组短路的拓扑研究较少,极端环境下的电机寿命较低,难以支撑空天领域的应用需求。
在GNC 共性通信与电子技术领域,特别是面向未来任务场景的智能GNC 通信与计算能力维度,在机间协同通信控制、无线信号覆盖广度和精度、多频信道利用率等方面差距明显,而下一代机载高性能计算机平台的研制工作也尚处于起步阶段,目前完成的原理样机旨在实现主要基本功能,对标任务模块实时重组、分布式资源协调管理、多业务等级自适应调整等潜在工况应用需求的硬件能力仍然处于初级水准,对未来必然需要开展的人工智能算法开发运行、海量自主训练学习数据识别调用等典型高算力工作任务的支撑力度尚显不足。
与此同时,中国GNC 航空电子装备在包括通信网络接入安全、数据传输时延和有效性、宽容错及并行计算重构、计算/存储资源动态均衡分配等可靠性与安全性指标维度层面仍然有很大改进空间,特别是在基本可靠性评估及单粒子效应、高强度辐射场(High-Intensity Radiation Field,HIRF)、强电磁脉冲(脉冲武器、核爆电磁能量瞬态释放)环境等贴近实战应用场景下,对于GNC 航空电子设备的数据仿真计算、完整防护设计、试验验证保障等能力不足,相关技术的成熟度及工程化应用水准与国外先进水平相比,依然存在明显差距。图6 所示为为高强度辐射场试验环境。
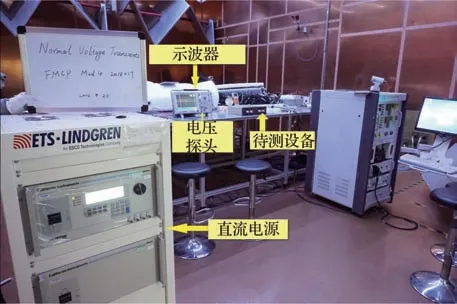
图6 高强度辐射场试验环境Fig.6 High-intensity radiation field test environment
面向以蜂群无人机为代表的微小型无人机装备配置需求,由于在数字引擎、先进ASIC/SIP芯片等强相关技术领域的理论积淀与研制经验不足,以及对于微小型无人机装备所必需的通信、计算、控制等技术的硬件整合与兼容能力欠缺,国内智能GNC 航空电子装备在高集成度、微小型化研制工作中尽管取得了一定的突破与积累,但对标国外先进水准,其在技术成熟度以及工程化应用依然没有脱离初级阶段,因而在面向军用飞行器型号的有效推广程度方面所取得的进展也十分有限。
以上差距的客观存在,使得国内GNC 航空电子装备在支撑飞控、导航两大系统方面,仅有无人机自主起降、近距空战决策与控制等智能技术的初步应用,使得大多数航空装备操纵仍以人工为主,单智能体与集群协同应用的智能化水平较低。
3 GNC 技术发展趋势
在网络中心战、赛博空间战等新型作战样式牵引下,未来的GNC 技术发展要面向海陆空天电磁全域作战场景,在各类武器装备全面提升网络化、体系化、智能化能力的牵引下明确发展目标,在任务层面、系统能力、核心部件、一体化综合等方面实现创新发展。
3.1 装备体系化联合协同发展引领GNC 技术
美国自2016 年提出分布式作战概念以来,以体系联合、跨域协同、平台互通为牵引的各类新型作战概念层出不穷(如图7 所示)。各种传统装备在新技术的赋能支撑下获得了一系列的创新应用和新质能力,各类新概念同时又引领人工智能、量子信息、无线通信等技术发展方向,加速实现在各领域的快速迭代与成果孵化。
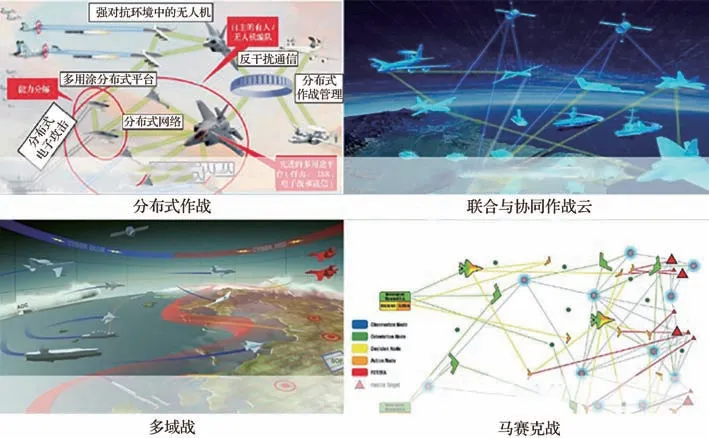
图7 新作战概念层出不穷Fig.7 New operational concepts are constantly emerging
当前,由陆、海、空、天、网、电多种力量聚合形成了具有松耦合、高内聚、灵活多变特征的空中分布式战术体系,所有作战平台通过发挥群体优势、共享态势信息、共同战术决策、共建杀伤网络,实现任务灵活部署、网络弹性配置、资源统一调配、分布式杀伤等功能,进而实现体系赋能。
基于上述趋势,GNC 核心能力发展方向可梳理为如下3 点:一是实现全时全域GNC 信息的自主精确感知与共享,支撑异构平台在多维时空域高效完成作战力量与资源的调度和指挥,实现作战力量配置由传统的“编队杀伤链”快速升级为“全域多平台杀伤网”;二是面向人机混合任务需求,提升GNC 系统在复杂态势感知、多源信息融合、高效人机交互、有人/无人协同[65]等方面的智能化水平,重构人类与武器装备的关系,不断提升GNC 系统对人类作战目的和意图的理解与授权等级;三是加强无人系统自主导航与智能控制技术[66]、大规模集群管理与控制[67]、拒止环境下多体制通信与导航技术研究,满足高强度拒止环境中协同侦察、战力实时重构以及体系攻防协同的新质能力需求。
3.2 面向强拒止环境的全球高精度自主导航技术
根据导航战概念,利用战场电磁干扰、卫星通信欺骗等手段,敌方可在作战区域内对各类武器装备形成卫星拒止,导致当前以卫星为核心的战场导航与定位体系面临极高的失效风险[68]。在这种强拒止环境下,全球精确情报、监视和侦察(Intelligence Surveillance Reconnaissance,ISR),精确打击以及任务协同等方面的需求对飞行器的远程久航、时空范围拓展以及对抗环境下的精确导航提出了更高的要求,这促进了新一代飞行器的研发与技术更新[69]。
为了满足这些需求,需要形成面向开放式模块化航电系统架构下的综合PNT 解决方案[70]。其中,高精度自主导航技术的突破是关键[71]。自主导航技术依赖于先进的自主传感器,如原子陀螺、激光陀螺、光纤陀螺、高精度光学加速度计以及原子钟等。这些传感器在原理探索、样机研制和测试加工等方面都需要持续研究推进,进一步提升其精度、稳定性和可靠性。
另外,外部导航辅助传感器[72]也必不可少。例如星敏感器、重力传感器、磁场传感器[73]、视觉、雷达(地形测高雷达和合成孔径成像雷达)以及声纳定位与测图等,这些都是可以利用的外部导航信号源。特别是对于射频机会信号[74],如广播电视发射塔、地球卫星、移动基站等地面和空中设施,以及低轨卫星(Low Earth Orbit,LEO)[75]和地球同步轨道卫星(Geosynchronous Earth Orbit,GEO)等航天器,通过专门开发后提供的导航信号,可以大大提高导航系统的精度、连续性和机载可用性。
数据融合算法和开放式数据接口标准也是综合PNT 解决方案的重要组成部分[76-77]。在稀疏量测下的误差精确估计和信息源即插即用是综合PNT 的关键特性,这可以提升系统鲁棒性和韧性,并降低跨平台移植的成本。这将为飞行器在各种复杂环境下的精确导航提供强大的支持,从而有效地提高作战效率,降低任务失败的风险。
以上是针对新一代飞行器远程久航、全球精确情报、监视和侦察(Inttlligence,Surveillance,and Reconnaissance,ISR),精确打击以及任务协同需求,形成的面向开放式模块化航电系统架构下的综合PNT 解决方案。这些技术的突破和应用将为未来的飞行器提供更高效、更精确、更可靠的导航服务,满足飞行器时空范围显著拓展和对抗环境下的精确导航要求,如图8 所示为中国未来PNT 体系技术发展设想。
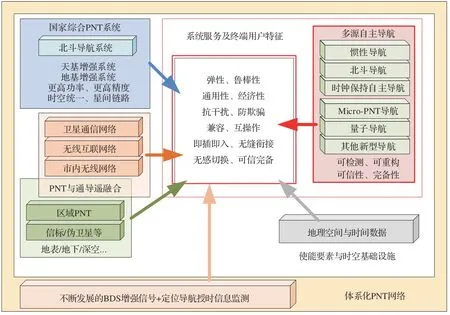
图8 中国未来PNT 体系技术发展设想Fig.8 China’s PNT system technology development vision
3.3 智能化多体协同飞行器制导与控制
随着空战平台数字化和作战方式协同化趋势不断发展,战斗机飞行员面临严重的信息过载,无法适应精准、高动态的空战操作,因此必须加强人工智能与自动控制技术的深度融合,为机载环境下的算法优化提供算力支撑。未来的飞行控制系统将以联合作战、体系作战、信息攻防作战为牵引,从单一的改善飞行品质和减轻飞行员工作负担(自动驾驶)向改善和提高飞机平台性能、提高任务效率、自动化水平以及飞机生存力方向发展。因此,未来的智能多体协同飞行器将以高性能平台、高可靠通信能力为支撑,以飞行决策、任务规划、应急处理和自主任务执行能力为拓展,同时具备跨域融合及有人/无人协同作战能力,以在减少对操作员依赖的同时,快速适应复杂跨域环境中的作战任务[78]。图9 所示为多体协同飞行器制导与控制技术在各类典型任务牵引下的发展趋势。

图9 多体协同飞行器制导与控制发展趋势Fig.9 Development trend of guidance and control of multi-body cooperative aircraft
在智能分布协同的空战体系[79]顶层牵引下,聚焦跨代飞行器管理系统架构,突破网络式架构和模块化研发技术,设计交互框架,解决跨域异构融合协作问题。有人/无人协同将成为复杂空战的核心特征[80],基于作战视角[81]设计有人/无人协同控制决策框架[82],结合深度学习开展实时性协同任务分配和航迹规划[83],合理设计复杂环境下协同制导与控制算法[84],解决集群作战耦合问题。高可靠的通信是多个飞行器协同工作的基础,未来的通信技术将更加快速、可靠,以支持更广泛的应用,这包括5G、6G 和卫星通信等技术的广泛应用,以确保高带宽和低延迟的通信,使多体飞行器能够实现更紧密的协同工作,共享信息和协同完成任务。人工智能和机器学习将继续推动多体协同飞行器技术的发展。未来的飞行器将采用更强大的人工智能和机器学习算法,以实现更高级别的自主决策和任务执行。通过基于数据的动力学模型校正,及故障自监测和自修复,机器学习可用于改善协同稳定性及飞行性能;此外,机器学习也可以用于优化资源分配和任务调度,以提高效率和任务完成速度[85]。先进飞行控制算法在飞行器上的应用向自主学习、自适应控制方向发展,随着飞行器任务剖面多样化和飞行环境复杂化,开展智能自适应飞行控制技术、多操纵面控制分配技术研究,在拓展飞行包线的同时增加控制冗余度,提高飞控系统的安全可靠性;协调各操纵面的偏转,实现最优的舵面控制效能与最佳飞行状态,提升控制性能,解决飞行器在任务层面面临的问题;面向典型任务场景,开发飞行安全保护和辅助决策功能,研究无忧虑飞行控制技术,建立基于知识库的辅助决策智能化系统平台,增强态势感知与评估能力、提高任务执行成功率、减轻驾驶员负担[86]。
3.4 新一代GNC 先进核心部件发展
先进的系统部件是系统新质能力的基础和源头。面向精确与自主要求,未来应加强在新型传感器、新原理构型作动部件、以及与GNC 系统相关的通信、计算等技术方向的创新研究。
传感器的发展重点是量子精密测量与传感、高精度高可靠MEMS 及固体波动传感等技术。其中,量子传感技术面向武器装备米级高精度自主导航定位和亚微秒级精确授时精度需求,以冷原子干涉陀螺[87]、核磁共振陀螺[88]、谐振式光量子陀螺[89]为代表器件,通过建立理论框架及误差模型,结合力、热、磁、光等多物理场综合作用,实现对极弱微观量子效应信号的高精度提取,可提供全自主、高可靠、全维度的时空基准信息,实现小型化高精度武器平台自主导航定位、长期累积定位误差的匹配修正以及在无信息辅助条件下超高精度导航定位等,将传统的航路导航作用扩展至对单机导航、武器协同、群体智能等全方位任务场景的支撑。图10 和图11 分别是美国斯坦福大学冷原子量子干涉系统和诺索罗普·格鲁曼公司的核磁共振陀螺仪。固体振动传感器技术面向航空武器装备自主导航对精度、体积重量功率(Space Weight and Power,SWaP)、可靠性等性能需求,以半球谐振陀螺、谐振环微机电陀螺为代表器件,通过建立谐振敏感结构的误差模型,实现面向机载应用环境的小体积、高抗载、低成本传感器研制。
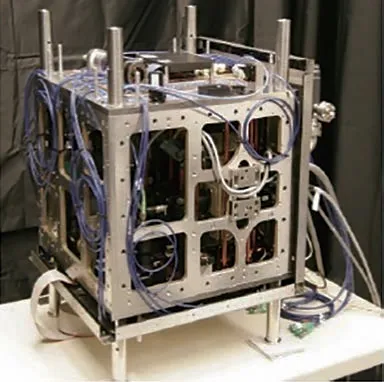
图10 斯坦福大学冷原子量子干涉系统Fig.10 Cold atom quantum interferometric system of Stanford University

图11 诺索罗普·格鲁曼公司的核磁共振陀螺仪Fig.11 Nuclear magnetic resonance gyroscope of Northorop Grumman
作动部件的发展重点是多参量分布式精确传感与驱动技术、宽域自适应高效作动技术。其中,分布式精确传感与驱动主要针对目前传感精度不高、测量量单一、驱动安装受限、智能化较低等关键问题,开展多参量分布式精确传感与驱动技术的研究,突破温度、压力、位移等多参量“感、算、控、输”四位一体精确测量与驱动技术,形成可适应复杂环境、多物理量测量与驱动的集成化作动器,支撑未来新构型飞行器研制;宽域自适应作动主要面向复杂环境下强对抗作战任务要求,针对当前飞行作动适应性不强、多源作动效能较低、关键作动部件性能不足等问题,开展复杂条件下刚柔耦合作动理论与控制方法研究,电、液、气多源异构作动能量优化方法研究以及电机、控制器、伺服阀等宽域高性能作动部件技术研究,支撑下一代高性能战机平台发展。
在智能GNC 通信与机载计算技术方面,基于未来任务场景,应加大面向集群协同控制应用的网络通讯、机间通信传输信道建模及波形体制、大规模多天线波束赋形、无线资源管理等先进通信技术的研究投入,重点发展面向智能控制的高性能计算[90]、开放性嵌入式高性能可组合计算架构、异构多核高性能计算模型[91]、面向任务的分布式资源协同管理、支持多业务等级的自适应确定性网络等关键技术,为新一代GNC 先进核心部件实现高算力、灵活供给、任务能力敏捷生成等需求提供不可或缺的硬件能力支撑[92]。
在GNC 航空电子装备的可靠性与安全性提升方面,重点开展网络介质访问控制、动态路由分配、基于时间触发机制[93]的多系统业务流量规划等先进网络通信技术研究,同时加强构造面向战术级自主任务的嵌入式计算性能标准测试集,提高嵌入式高性能计算技术实战应用效果,实现对计算系统的静态和动态性能评估,研究容错计算架构及并行计算重构[94]、计算/存储资源智能化动态分配均衡技术,并依托对于降低电子功能模块设计验证复杂度、单粒子效应/复杂电磁环境下软性错误的抑制与适应、航空电子可靠性试验加速因子生成方法等方面的深入研究,探索GNC 航空电子装备在各类工况下满足系统安全、性能、管理等方面工作任务需求的模拟验证能力,最终用于正向指导GNC 航空电子装备可靠性与安全性的设计能力提升。
同时,面向无人机装备微小型化、智能自主化、任务多样化的客观发展趋势,新一代智能航空GNC 技术应积极拓展通信、计算能力,持续聚焦数字引擎、系统级封装(System in Package,SIP)、专用集成电路(Application-Specific Integrated Circuit,ASIC)[95]等核心技术 攻关,并借鉴在人工智能、量子通信与计算[96]、新型复合材料与生产工艺等前沿领域的最新研究应用成果[97],加快突破高集成度、高兼容性、微型化、轻量化、集群协同[98]、复杂任务环境下生存适应能力等关键技术瓶颈,在改进提升功能模块化组合、宽域任务适配性水平的基础上,进一步加大在军用、民用无人飞行器市场领域的推广应用,以更好支撑飞控、导航两大系统的未来发展需求。
3.5 下一代飞行器控制管理架构与GNC 一体化融合设计技术
面向未来飞机平台对飞行性能不断提升,作战任务不断变换与迭代的需求,将飞行器的飞行任务控制与飞机载荷任务控管理进行区分是为下一代飞行器系统发展的趋势之一[99]。为应对提升飞行任务控制能力需求,需要将飞行器中完成飞行任务的导航、制导和控制能力融合在一起。通过对自主飞行器的分层递进结构控制体制、网络化协同导航与控制、面向不同飞行平台的任务体系架构与综合设计等技术研究,满足飞行器在跨速域、跨空间域、跨任务域的协同与控制需求,确保飞行器能够适应不确定环境、任务/目标随机变化、少依赖甚至不依赖通过数据链传输的人类指令,并且具有人机交互、在线重规划和自学习等功能,有力支撑面向不同任务平台的新装备开发。如旋翼飞行器在复杂地形和退化视觉环境(Degraded Visual Enviroment,DVEs)执行飞行作战任务的挑战,美国陆军努力将全天候传感器、人机交互/自主决策、基于性能制导以及飞行控制结合在一起,以实现在DVEs 条件下,地形导航、应激性避障、选择着陆地点和自主着陆等一系列自主飞行能力,为未来飞行员增强态势感知,降低驾驶负担[100]。
图12 为EH-60L 飞机上的任务自适应架构(Mission Adaptive Architecture,MAA),其由改进的任务管理软件(Mission Manager)、APAFCS(Autonomous Partial Authority Flight Control System)和硬件组成。
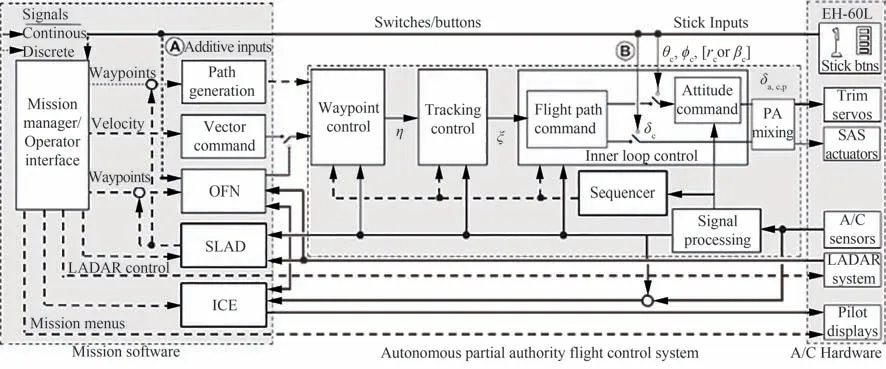
图12 EH-60L 飞机任务自适应MAA 架构Fig.12 EH-60L aircraft mission adaptive MAA architecture
为实现上述飞行任务,需要将传统的导航、飞行管理、飞行控制、推进控制及机电管理等系统按照整体飞行任务需求进行综合化设计,在任务层级聚焦飞行员应用需求进行优化设计达到全局最优目标,将以往单一、分散实现的导航、制导和控制等技术进行综合化实现,构建完整“飞行器控制与管理”系统。在此过程中采用系统架构、平台设计、容错和领域建模等先进技术,重点发展基于模块化任务、开放式架构的飞行器控制与管理平台设计能力,提升系统总体规划设计与验证能力,实现低成本、高效、易拓展升级的可复用系统研发技术平台,支撑各项高性能飞行任务的完成。如美国卡耐基梅隆大学和Adventium实验室正在积极开展以架构为中心的虚拟综合流 程(Architecture Centric Virtual Integration Process,ACVIP)[101],其以系统架构为中心,从需求、安全、实时性等维度开展架构建模和权衡分析,支撑架构虚拟综合验证;NASA 开展先进机载系统与软件项目,以实现开放式架构为目标,允许多个供应商在统一架构和接口定义下提供模块化的软硬件功能产品,并可通过技术更新来实现系统功能版块的快速升级,经济高效地验证使用新技术[102];欧洲的德国斯图加特大学提出基于平台系统研发,降低系统开发难度和成本,通过构建平台架构提供系统平台管理和应用程序分离、透明[103]。
在系统物理架构实现构方面,分布式和网络化已经是系统架构实现的普遍趋势,但如何应用总线通讯简化系统组件之间通讯设计、提升系统应用组件实现的确定性并确保系统的安全性和可靠性,依然系统架构实现不懈努力的方向。从早期采用以硬线通讯为主,以ARINC429 总线、1553B 等低速总线为辅等二代、三代飞行控制系统物理架构;到目前美国以1394B 高速通讯总线为核心的分布式飞行器管理系统架构,系统组件之间通讯能力都得到质的提升。但是面对下一代系统发展需求,系统的范围和组件之间通讯诉求向着功能多样化、通讯可配置、硬件统一化、应用成本低等方面发展。自主飞行器的核心计算架构如图13 所示。
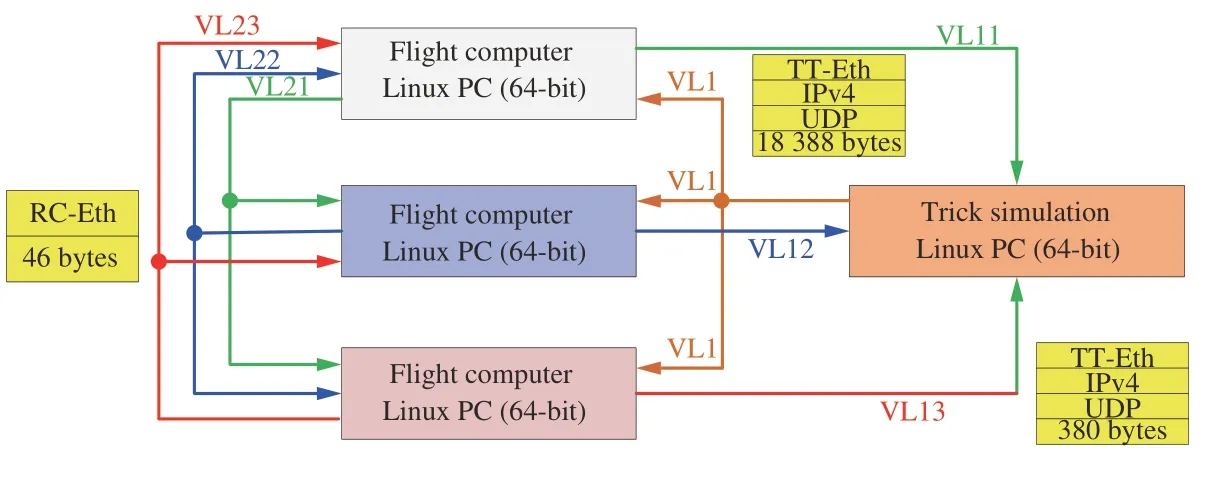
图13 自主飞行器的核心计算架构Fig.13 Core architecture of autonomous aerial vehicles
进入21 世纪,欧美在传统以太网络基础上不断开展满足安全关键功能应用需求的网络协议的研究与应用,如TTP、AFDX、TTE 等网络,在此过程中还引入时间触发概念以提升网络通讯的确定性乃至系统运行的确定性,避免系统组件之间涌现性行为导致偶发问题出现。如美国在航天器机载系统架构设计过程中采用TTEthernet 技术,该项目美国宇航局先进演示系统(Advanced Electronic System,AES)计划中航空电子和软件(Avionics&Software,A&S)项目的一部分[104];在航空领域,霍尼韦尔相关专家也对航空与航天网络配置方案特点进行了论证[105],柯林斯航空航天针对新一代飞机提出了MOSARC 机载电子解决方案,能够确保提供低成本、低风险、可认证的时间触发网络(Time-Sensitive Network,TSN)安全技术[106]。
4 发展建议
在技术层面,坚持探索新思想、新概念、新原理、新方法、新材料,解决武器装备研制过程中的基础技术问题,为突破性创新和形成能力奠定基础。GNC 技术的未来发展整体趋势是智能化、自主化、模块化、综合化、数字化、网络化、灵巧化、微小化,其发展方向与实际应用关系密切,应始终以飞行器的创新应用为根本需求,为其发展指明方向。此外,应抓住当前新兴技术蓬勃发展的历史机遇,强化基础科研成果与工程研究的转化与融合。例如,加强量子信息技术与导航技术的融合,在导航战下提供与卫星导航精度相当的绝对定位、导航与授时能力,为跨域作战提供全自主、高可靠、全维度的时空基准信息,实现高精度武器装备平台自主导航定位、长期累积定位误差的匹配修正以及在无外部信息辅助条件下超高精度导航定位等,将传统的航路导航扩展至对单机导航、武器协同、群体智能等全方位任务场景的支撑;加强人工智能技术与制导控制技术的融合,从智能动力学建模、自适应和自学习飞行控制[107]、智能辅助决策、人机控制权限分配等方面着手,提升飞行器单机自主化程度,使飞行员将更多的精力集中于战斗任务,实现飞行员角色向战斗员的转变,以此为基础进一步加强多智能体协同感知、人机协同决策与自主规划、多机自主协同控制等,将飞行控制提升到飞机任务层面,提高航空装备在复杂环境中的感知能力和快速响应能力,使航空装备从“数据优势”“信息优势”“知识优势”到“决策优势”的飞跃,提升飞机综合任务能力[108]。
在创新机制建设层面,以国家创新驱动发展战略为引领,不断完善科技创新环境,依托国家各项计划和渠道资源支持,建立由高等院校、科研院所、工业部门共同构成的科技创新全生命周期创新体系。积极推动创新链、产业链、资金链、人才链的深度融合,围绕产业链部署创新链,围绕创新链布局产业链[109],推进体系化、分布式的国家级创新体系建设,加速组建跨领域的协同创新基地和创新联合体,促进基础研究、应用基础研究、应用研究和技术创新融通发展,发挥重大工程项目牵头单位的引领作用,广泛联合行业上下游、产学研用力量,在前沿技术探索和关难瓶颈问题两方面实现联合攻关,解决跨行业、跨领域的共性技术问题,形成一批具有引领性的自主原创成果[110]。在联合高校与国防科技工业部门的过程中,重点要做好3 项举措:一是强化与航空装备应用部门的沟通联系,共同参与跟进新型作战概念研究,主动捕获装备发展趋势,引领和指导技术创新方向;二是以科研院所为主,联合高等院校积极组建专门面向基础性、前沿性技术创新的开放式研究机构,将最前端的原创技术成果引入具有确定应用需求的创新方向上,加速实现对最先进技术成果向GNC 领域的引入和孵化;三是构建完备的协同创新机制,充分发挥国家、行业创新体系的创新潜能,凝聚国内外导航与控制技术领域优势创新资源,统筹推进基础研发能力建设与联合,加速形成优势互补、紧密协同的产学研联盟,打造与国内外各级创新平台的良性互动和高效协同的技术创新节点,培育一流人才队伍,为航空装备技术发展提供不竭动力。
