节水式洗手拖地一体化智能机器人
2024-05-11梁宸睿郝佳奇李佳康连彩婷靳江艳
梁宸睿,郝佳奇,李佳康,连彩婷,靳江艳
(河北科技大学,河北 石家庄 050018)
近年来,人们对环境卫生的重视程度不断提高,我国也发布了多项有关环境卫生的政策。自2020 年新冠疫情暴发后,我国对公共卫生建设提出了更高的要求。“勤洗手”这一简单却重要的卫生习惯再次引起人们的高度重视[1]。公共洗手台作为卫生领域的重要产品满足了洗手需求,保护了身体健康。然而,在人流量高峰期,水龙头数量的限制和公共洗手台工作环境的狭小导致公 共洗手台的使用效率较低[2]。现今正处于后疫情时代下,对商场、医院、酒店、写字楼等大型楼宇而言,人流量大、人群聚集,人们仍旧需要频繁洗手,地面需要定时清洁消毒。
而便携式洗手设备在我国的研究起步相比于发达国家较晚,随着工业的进步与发展,目前市场上已经研发生产出了不需要在室内安装进水管、排水管就能使用的洗手台,但是其不能解决公共场所地面清洁和消毒的问题。综上所述,传统洗手台由于设计原理的限制,不可避免地存在利用率低下、使用场所固定、节水效果较差等诸多缺陷,具有较大的改进空间。为此,本文研究一款有着重要使用价值的节水式洗手拖地一体化智能机器人,有助于提高水资源利用率。
1 总体设计方案
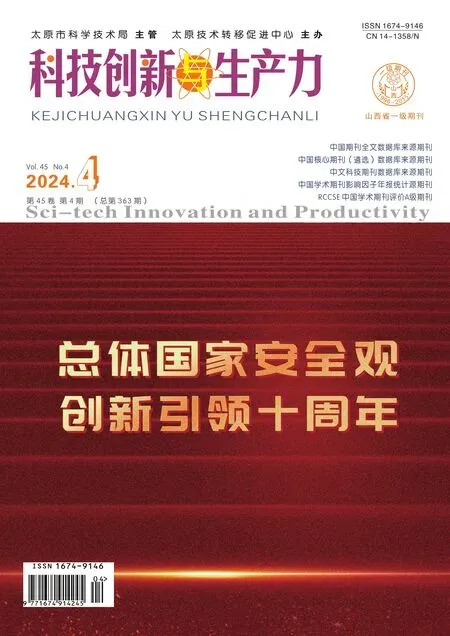
节水式洗手拖地一体化智能机器人的机械结构主要由移动式洗手系统、污水处理装置、地面清洁系统等部分组成。节水式洗手拖地一体化智能机器人三维结构图见图1,其工作过程描述如下。
图1 节水式洗手拖地一体化智能机器人三维结构图
为了保证机器人能够较长时间工作,配备了能够连续工作8-10 h 的充电电池和30 L 储水箱。设备加水和充电完成后,为用户提供日常洗手操作,具有多种服务模式。机器人固定放置在某个人流量大的区域。机器人始终移动作业,当感应到有人靠近时,则停下来等待。随后,系统将根据顾客的身高自动调整洗手台的高度,使其更加贴合顾客的需求。最终,顾客只需将双手放置在水龙头下方,即可感应到水流自动启动。
针对办公楼的个性化应用,机器人固定放置在某个区域,用户可通过按键或语音方式将机器人召唤至某个办公室门口进行洗手操作。
洗手后的污水经过滤和净化后可用于地面清洁。一旦污水箱中的水量达到排水需求,机器人将按照预先设定的路线进行日常地面清洁工作。进行地面清洁工作时,机器人会打开半封闭式紫外线消毒灯管,保证不对人体造成伤害的前提下完成细菌消杀任务。当水量和电量不足时,机器人会发出警报,并自行进行加水和充电操作。
2 各系统结构设计
2.1 移动式洗手系统
1)轮组的设计。该设备底盘共安装了4 个轮组,每个轮组选用RM3508 直流无刷电机作为直驱动力,电机的输出轴通过特制的夹紧型联轴器与麦克纳姆轮的轮毂相连,为了减少电机轴不必要的受力,在电机与联轴器直接安装止推轴承。用螺栓将安装在轮毂内侧的压紧盖与电机轴内侧的螺纹孔进行拧紧,从而使整个轮毂压紧,见图2。

图2 轮组装配模型
2)轮组布局。麦克娜姆轮有左旋和右旋之分,四轮底盘的麦克纳姆轮布置方式有6 种,见图3。

图3 轮组布局示意图
根据线性代数知识,雅可比矩阵条件R (A)=3时,实现全向运动,上述结构中只有(a)、(b)两种满足,又因为(a)方案不能实现旋转,所以该设备底盘选用(b)结构[3]。
3)动力系统模块。为了实现对4 轮麦克娜姆轮的闭环控制,在底盘方案设计中选择了直流伺服电机作为驱动电机。在选择电机时不能盲目,要综合考虑多方面的因素,以充分发挥电机的性能。
大疆创新推出的RM3508 动力套装,见图4,有领先的功率密度,在提供大功率的同时,体积更小,重量仅为同等级设备的20%。通过与RMC620电调的结合,可以实现更加高效、灵活且稳定的正弦驱动,这一点远超过了传统的方波驱动。

图4 RM3508 电机套装
2.2 污水处理系统
污水处理模块涵盖了污水过滤和回收两个关键步骤,该过程需要进行3 级过滤,包括初级过滤、活性炭过滤以及回收阶段的过滤。污水箱过滤机制的示意图见图5。

图5 污水箱过滤机制示意图
初滤层和活性炭滤层是移动洗手台污水处理的两个核心部分。初滤层主要由粗滤网构成,通过使用这种方法,可以有效地清除污水中的大颗粒物质,如纸屑、食物残渣等;而活性炭滤层则是由活性炭和棉网组成,通过吸附和过滤的方式,去除异味、脱色及过滤吸附氯离子和有机物等污染物[4]。活性炭滤层的使用,不仅能够提高回收后水的品质,还能有效延长污水处理设备的使用寿命。为了保证处理后的水质量达到标准。在移动洗手台污水箱底部增加了活性炭滤水器,该滤水器能够实现对污水的再次过滤,对微小颗粒和污染物进行层层过滤,从而达到更高的净水效果。
2.3 地面清洁系统
为了实现废水的再利用,抽水泵将经过净化的污水通过导管精确输送到擦地单元,以确保托盘保持适当的湿度并最大程度地清除环境中的细菌。整个装置大致可分为以下5 个部分。
1)升降装置。通过舵机对擦地单元进行控制,使擦地单元能够上下移动。洗手时使擦地单元悬空,拖地时使擦地单元紧贴地面,并且给予擦地单元一个向下的压力,增大擦地单元与地面的摩擦力,整体拖地装置示意图见图6。

图6 拖地装置示意图
2)擦地单元。主要由托盘和喷淋装置构成,通过传动部分使托盘紧贴地面。随着小车移动,无刷电机驱动托盘旋转与地面产生摩擦力,在喷淋装置供水的情况下托盘实现地面除污功能,整体擦地单元示意图见图7。

图7 擦地单元示意图
3)清洗系统。托盘清洗方案有两种。一是通过喷淋装置喷水使托盘充分浸湿,整个擦地单元进行高速旋转甩干托盘,反复几次即可完成托盘清洗工作。二是通过托盘的固定卡扣将托盘进行拆卸从而完成托盘的清洗工作[5]。
4)喷淋装置。由给水管、抽水泵、阀、污水箱等组成。水流量通过抽水泵的阀门开关进行控制,见图8 喷淋装置示意图。
图8 喷淋装置示意图
5)杀菌装置。在设备底面紫外线杀菌装置周围加装遮挡装置,以避免紫外线对人体造成伤害。遮挡装置采用滑动式的设计,当紫外线杀菌装置开始工作时,遮挡装置会自动启动,保护周围的人员免受紫外线辐射[6]。当紫外线杀菌装置停止工作时,遮挡装置也会自动关闭,方便下一次使用。
2.4 升降机构模块
本装置采用丝杠作为升降传动装置以适应不同的高度需求,采用小型滑轨作为升降过程中的导向装置以确保洗手台升降的定向移动,图9 为该设备的升降方案的图解。

图9 升降机构图解
该升降机构可被视为一种直线运动机构,它由牵引机构、导向机构和连接机构组成。牵引机构提供动力以驱动整个装置,导向机构则将运动限制在一个自由度内,连接机构负责将动力传递到被牵引的物体上。
在本设备的设计中,为了改善受力状况,采用了两组丝杠对称布置方式。
3 结束语
综上所述,节水式洗手拖地一体化智能机器人具有节水、高效、便捷的特点,可显著减少资源的浪费,提高清洁效率和保障用户健康。机器人的核心技术在于将洗手后的废水通过净化装置进行过滤和净化,再把净化后的水用于地面清洁。在实际应用中,该机器人可广泛用于商场、医院、酒店、写字楼等大型楼宇的保洁工作。