基于动态虚拟电抗的虚拟同步机系统有功环电压动态补偿策略
2024-05-11刘亚东宋新立戴汉扬李东升
刘亚东,宋新立,戴汉扬,李东升
(中国电力科学研究院有限公司,北京 100192)
0 引言
随着新型电力系统中新能源渗透率的逐渐升高,系统的电压支撑能力和抗扰动能力逐渐变弱,这对新型电力系统的安全稳定运行造成严重威胁。通过在并网换流器的控制策略中加入虚拟同步发电机控制,可以模拟同步机的电压源特性,进而提高系统的主动支撑能力。
当电网电压严重下降时,VSG系统也会出现传统的暂态功角稳定问题,并且会产生数倍于额定电流的冲击电流。电力电子设备通常只能承受2~3倍额定电流的过电流,其过电流耐受能力远低于同步电机;所以,当过电流出现时如果不及时处理,则很容易造成设备损坏和新能源脱网,进而危及系统安全。因此,为了保证电网的安全稳定运行、提高并网换流器的故障穿越能力,必须同时考虑VSG系统的暂态功角稳定和故障限流问题。
文献[1-3]综述了电压源型变流器的控制模式及相关应用,给出了下垂控制、虚拟同步发电机控制、虚拟振荡控制等典型控制器模型及原理。
与关于VSG的小扰动稳定性的相关研究相比,关于VSG的暂态稳定性的相关研究相对较少。文献[4,5]针对VSG的参数设计方法和稳定性分析展开了讨论。文献[6,7]指出,减小故障期间的有功功率指令值可以抑制功角失稳。文献[8]提出了引入附加功率以增大VSG输出有功功率的暂态功角稳定增强方法。文献[9]提出一种改变加减速面积的增强型VSG控制方法;但是,通过增大内部电压来增大减速面积,将会进一步扩大VSG与电网之间的电压偏差,即使在弱电网中,也可能会出现较大的过电流。虽然这些策略增强了暂态功角稳定性,但未考虑故障限流问题。
文献[10,11]提出,在电网发生故障时,将电压源型控制切换为电流源型控制,直接在电流内环设置限幅环节;但是,电流型控制不能为电网提供电压支撑,且模式切换时存在过电压冲击问题。文献[12]提出了相量圆分析方法和虚拟电抗联合限流策略,但并没有考虑暂态功角问题。文献[13,14]提出了一种虚拟电阻与相量限流相结合的限流方法,实现了稳态故障电流和瞬时冲击电流的全故障限流;但是,虚拟电阻的持续投入不利于故障期间的暂态稳定性[15]。
综合考虑VSG自身的暂态功角稳定性和故障限流,本文提出了有功环有功功率指令值自适应控制策略,并在此基础上根据暂态稳定机理分析了系数KU对VSG系统的影响。另外,针对故障电流过流现象,通过设置动态的虚拟电抗投入和退出时间来限制故障冲击电流的大小。最后,与传统控制策略进行比较,验证了所提控制策略的合理性和有效性。
1 VSG模型
VSG的系统配置和控制结构如图1所示。图中VSG的控制结构可分为2部分,其中有功功率控制回路的目的是模拟电机转子的机械运动,无功控制回路用于调节输出的无功功率。
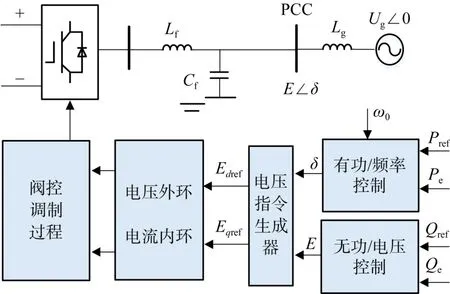
图1 VSG系统拓扑Fig.1 Topology of VSG system
图中Lf、Cf、Lg分别为滤波电感、滤波电容、线路电感;Ug为电网电压;E∠δ为VSG的输出电压;δ为并网点的功角;E为VSG的输出电压幅值;PCC为并网点;Edref、Eqref分别为VSG系统输出的d轴和q轴电势参考值。
有功功率控制回路的摆幅方程可表示为:
式中:J为虚拟惯量系数;D为虚拟阻尼系数;ω为虚拟同步机的角速度;ω0为虚拟同步机的角速度参考值;Pref为构网型储能的有功功率指令值;Pe为构网型储能输出的有功功率。
无功电压方程可表示为:
式中:Qref、Qe分别为参考无功功率和输出无功功率;E0为额定输出电压;Kq为无功电压下垂系数。
假设逆变器与电网之间的阻抗呈感性,线路电抗X=ωLg,则系统稳定运行时虚拟同步机输出的有功功率和无功功率表达式为:
把式(4)代入式(2),得到E的表达式为:
结合式(1)和式(3),可得出VSG的二阶非线性微分方程为:
代入式(5),得:
由于式(7)结构复杂,故其解析解很难得到;相反,相图曲线即式(7)的图形解更容易得到,且用其提供的结果来判断系统的稳定性会更简单、直观。所以,通过相图曲线定量分析参数对系统暂态稳定性的影响。
2 功角稳定分析方法
2.1 暂态控制原理分析
外部功率回路的动态速度通常比内部电压电流控制回路慢10倍以上。电压外环和电流内环可以看作是具有理想参考跟踪的单位增益,而暂态稳定性问题主要由外部功率控制环决定[19]。
一般情况下,VSG的暂态功角稳定性取决于大扰动下功角δ的动态响应。如果δ能收敛到一个稳态值,则VSG是稳定的;如果δ偏离稳定平衡点,则VSG是不稳定的。
功角曲线如图2所示。
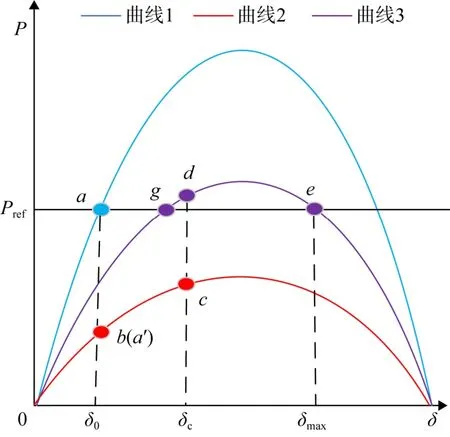
图2 功角曲线Fig.2 Power angle curves
图中,曲线1表示正常运行状态、曲线2表示故障运行状态、曲线3表示故障切除后运行状态。
正常状态下,VSG运行于稳态平衡点a。此时Pref=Pe,VSG在故障发生后直接从初始平衡点a运行到b点。
在故障状态下,由于Pref大于Pe,VSG的工作点由b改为c。
切除故障后,运行点在曲线3上沿点e方向移动。若运行点超越e点(运行轨迹为a→b→c→e),则运行点不会回到稳定平衡点g,最终导致VSG失去同步,失去控制。
因此,只有当VSG系统功角曲线的减速面积大于加速面积,就能保证VSG的功角稳定。
如图3所示,可通过扩大Δδ的允许范围来增强系统稳定性,即在电网电压下降时减小有功参考功率Pref,从而实现增大Δδ的允许范围。一旦电网发生故障,Pref降为Prefn,则稳定平衡点和不稳定平衡点分别由b、b1变为bn、b1n。因此,功角的允许超调范围Δδn比原来的Δδ宽得多,可以利用这点有效地增强暂态稳定性。
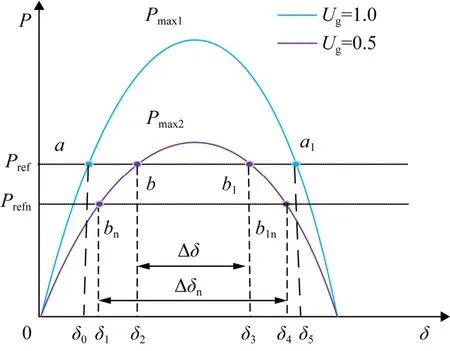
图3 电网电压下降时有功基准功率降低的功角曲线Fig.3 Power angle curves of active power reference power reduction when grid voltage drops
但在电网故障下,特别是三相对称接地故障发生时,系统总是伴随着较大的故障电流。此时,逆变器可能会出现过电流现象,进而造成其物理损坏。因此,在故障状态下,必须同时考虑增强VSG暂态稳定性和设置限流控制环节2个方面的措施,保证系统稳定运行[20,21]。
2.2 暂态功角稳定控制策略
由于暂态问题是由电网电压骤降引起的,而电网电压骤降也会导致并网点上的电压下降,因此可以利用测量并网点上电压幅值变化来检测电网电压骤降是否发生。
考虑到VSG系统具有参数调整灵活的优点,所以在故障期间导入本文所提的电压动态补偿控制策略,将反映电压偏差的信号引入到功率指令信号中,以起到减小等效有功功率参考值的效果。利用式(5)可以进一步研究E如何随δ变化[15]。
定义中间变量:
则公式(6)可改写为:
E对H的导数为:
由于:
可得:
这意味着E是H的单调递增函数,而H对δ的导数为:
因此H是δ的单调递减函数。综上所述,可以推出,在定义域内E是δ的单调减函数。
由于E>0,因此在定义域内E2是δ的单调减函数。另外当E处于(0.5,1)区间时,电压跌落深度较浅。相对于采用电压的差值,选取电压平方的差值可以在维持功角暂态稳定的前提下保证有功功率指令值不至于太小,进而保证传输的有功功率也不会减小更多。当E处于(0,0.5)区间时,电压跌落深度较深。选取电压平方的差值可使有功功率指令值变化较快,使系统能快速根据故障情况做出调整,最大程度地降低有功功率参考值的大小,确保系统在故障期间能够维持稳定。
本文采取控制策略的等效有功功率参考值为自适应量,即:
式中:KU为常数。
综上可知,Pref1是δ的单调减函数。在故障期间随着功角δ的增加,Pref1数值变小,这样可等效减小加速面积,提高暂态稳定性。
VSG有功环改进框图如图4所示。
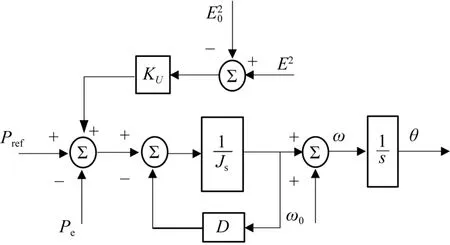
图4 故障期间控制回路Fig.4 Control loop during failure
由图4可以推导出二阶非线性系统为:
另外由图4和式(16)可知,系数KU是增强暂态稳定的关键因素。结合相图曲线理论,根据式(7)画出图5。
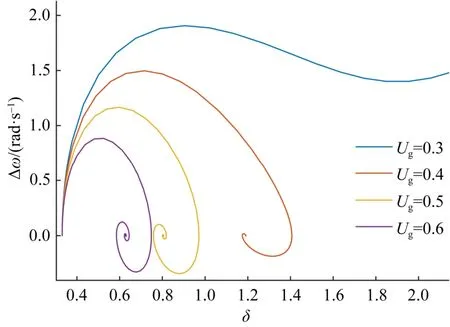
图5 电网电压跌落深度对VSG相图的影响Fig.5 Impact of grid voltage drop depth on VSG phase diagram
图5描述出了不同电压跌落程度下系统的暂态稳定性。
联立式(3)(5)及(16)得出图6,当Ug从1.0 p.u.跌落至0.3 p.u.,KU对VSG相图的影响如图6所示。
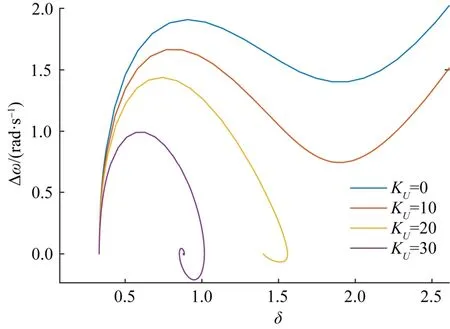
图6 当Ug从1.0 p.u.跌落到0.3 p.u.,KU对VSG相图的影响Fig.6 Impact of KU on VSG phase diagram when Ug dropped from 1.0 p.u.to 0.3 p.u.
在没有额外的降有功功率参考值路径的情况下,当电网电压跌落程度越来越深,系统从稳定状态转换为不稳定状态。此时,由于电压降低,可以通过增大系数KU来增大Δδ的允许范围,增强系统暂态稳定性;否则,如果KU等于0,在电网电压跌落为Ug=0.3时,系统会发生失稳。但当KU逐渐从0增加到30时,如图6所示。
最大频率偏差呈现逐级减小的趋势,系统从不稳定状态转换为稳定状态。这意味着所提出的控制策略可以减小电网电压Ug下降时的频率偏差,有利于暂态期间的稳定。本文KU的最终取值为20。
2.3 故障限流方法
虽然暂态功角控制策略可以在一定程度上减小故障电流,但当电网遭遇严重故障时,冲击电流也无法一直在允许范围。因此,需要在暂态功角控制策略的基础上加入故障限流控制模块来抑制冲击电流对设备的影响。
传统虚拟阻抗控制方程如下:
式中:Udref、Uqref分别为VSG系统输出的d轴和q轴电压参考值;Rv、Xv分别为虚拟电阻和虚拟电抗;id、iq分别为输出d、q轴电流值[16]。本文不考虑虚拟电阻的影响,即Rv=0。
在故障期间,输出电流骤增。接入恒定虚拟电抗后,在冲击电流下降过程中直接退出恒定虚拟电抗时会产生较大的瞬时电流冲击,危害机组安全稳定运行[17,18]。为减小冲击影响,本文引入了一种变化的虚拟电感,表达式为以e为底的指数部分,使虚拟电抗平缓地达到0,这样可在一定程度上减小冲击电流,而且故障期间虚拟阻抗为0,不会影响系统的响应特性[22]。虚拟电抗投切和退出过程如图7所示。

图7 虚拟电抗投切和退出Fig.7 Virtual reactance switching on and off
在故障瞬间:
在故障切除瞬间:
式中:Xv1为修改后的虚拟电抗;t为当前时间;t0为故障发生时间;Δt为虚拟电抗从0达到最大值所用的时间;t1为虚拟电抗切除时刻;A、B为常数,可根据实际场景自行设定。
本文A、B取值都为1。
本文虚拟电抗的数值是在常规控制策略下选取的。虚拟电抗的加入改变了VSG输出的内电势,等价于线路串联虚拟电抗[23]。因此,可参考式(7)和式(17),得到加入虚拟电抗后系统的状态方程式(20)。
式中:Xz为加入的虚拟电抗Xv与线路原电抗X之和。
设置电网电压Ug由1.0 p.u.跌落到0.4 p.u.。通过不同的Xv画出相图曲线,结果如图8所示。
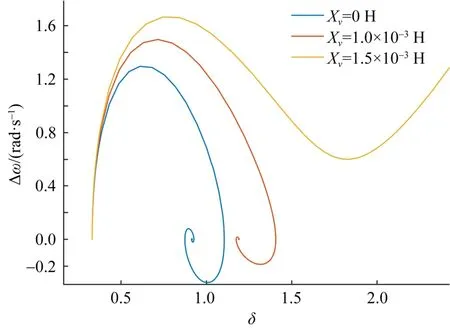
图8 当Ug从1.0 p.u.跌落到0.4 p.u.,Xv对VSG相图的影响Fig.8 Impact of Xv on VSG phase diagram when Ug dropped from 1.0 p.u.to 0.4 p.u.
由图8可知,不同的Xv对系统发生故障后的暂态稳定性有着不同影响:Xv越大,越不利于维持暂态稳定性;但Xv也不能取值太小,否则对于实际系统的冲击抑制效果不明显。本文Xv的最终取值为1.0×10–3H。
图9展示了动态虚拟电抗Xv1对系统故障瞬间和故障切除瞬间过电流的抑制效果。由图9可知,该限流策略效果明显,能很大程度上降低故障期间的冲击电流。

图9 电网电压跌落为0.4 p.u.时不同Xv1对VSG控制过电流的抑制作用Fig.9 Inhibitory impact of different Xv1 on VSG control overcurrent when the voltage drop of the power grid is 0.4 p.u.
3 仿真验证
为验证本文提出的控制策略,在PSCAD/EMTDC中搭建如图1所示的电路模型,主要仿真参数如表1所示。

表1 仿真参数Tab.1 Simulation parameters
初始时刻VSG在额定状态下并网运行,额定功率为100 kW,有功功率参考值设定为1.0 p.u.;在l s时刻,电网电压跌落到0.6 p.u.;3 s时,切除短路故障。
在常规控制与本文提出的控制策略下,各电气量输出结果如图10所示。

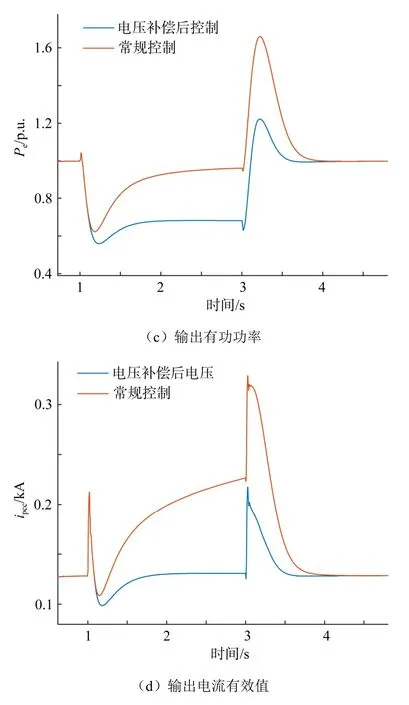
图10 常规控制与本文提出的电压补偿控制下VSG输出各电气量Fig.10 Each electrical quantity output by the VSG under conventional control and the voltage compensation control presented in this paper
由图10(a)可以看出,与常规控制策略(即对有功环控制结构不加任何附加环节的经典虚拟同步机控制策略)相比,有功环电压补偿控制策略有效抑制了故障期间VSG输出的功角变化。
由图10(b)可以看出,暂态输出频率得到了抑制。
从图10(c)和图10(d)可以看出,VSG输出有功功率减少至0.5 p.u.,故障期间的并网点电流值大幅降低。
电压补偿控制下,加入虚拟电抗前后的VSG输出并网点电流曲线如图11所示。
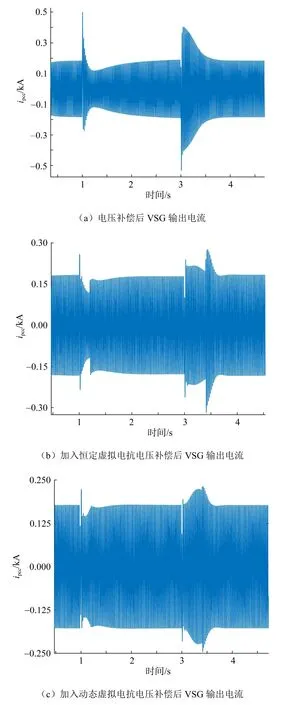
图11 电压补偿控制下加入虚拟电抗前后的VSG输出并网点电流Fig.11 Grid-connected current output by the VSG before and after adding virtual reactance under voltage compensation control
此外,从图11(a)和图11(c)可以看出,在加入动态虚拟电抗控制后,故障瞬间的冲击电流最大值由原来的0.5 kA减小为0.3 kA,故障切除瞬间的冲击电流最大值由原来的0.4 kA减小为0.3 kA左右,VSG短路冲击电流得到有效抑制。
从图11(b)和图11(c)可以看出,相对于恒定虚拟电抗控制,动态虚拟电抗的控制对于冲击电流也有一定的抑制作用。
由图10、图11可见,暂态虚拟电抗法和有功环参考功率自适应控制方法能提高暂态稳定性且能有效抑制故障瞬间和恢复期间的过电流。
4 结论
本文针对基于单机VSG系统故障期间的功角稳定和故障限流问题进行研究。经仿真得到如下结论:
1)通过在有功环引入电压动态补偿环节,并在故障期间自适应改变有功环有功功率指令值,可有效改善故障期间系统容易失稳的情况,增强了系统稳态运行的性能,提升了机组的支撑能力。
2)通过引入以指数形式变化的虚拟电抗,并结合算法设计虚拟电抗投切和退出时间、动态调整虚拟电抗的数值,可有效抑制故障瞬间和故障切除瞬间的短路冲击电流。
展望:需要说明的是,本文提出的策略仅在单个VSG和三相对称短路故障工况下进行了仿真验证。在未来工作中,将针对不对称故障及多机系统进行策略改进。