多场景智能环境监测机器人设计
2024-05-10韦羽陈江丽甘永汇杨泽成
韦羽 陈江丽 甘永汇 杨泽成


摘 要:【目的】為解决传统环境监测系统面临的监测对象单一、使用场所固定且缺乏灵活性、监测数据缺乏深度加工等问题,从而设计一款多场景智能环境监测机器人。【方法】以STM32微控制器为核心,结合二氧化碳传感器、温湿度传感器、有害气体传感器、激光粉尘传感器、红外模块、超声波模块、显示屏、电源、电机、直流减速电机、蜂鸣器、LED及Wi-Fi模块,从而设计一款基于STM32的多场景智能环境监测机器人,代替人为进行环境数据监测及采集。【结果】通过C语言与相关的STM32算法,实时监测环境中的CO2浓度、空气温湿度、有害气体、PM2.5浓度及PM10浓度等多种环境参数,同时也可远程及多场景监测环境参数。当监测所得环境参数大于设置参考阈值,系统则会发出警报,提示操作者做出应对措施。同时,机器人在对环境监测过程中可自动行驶与自动避让障碍物。【结论】多场景智能环境监测机器人设计具有实时监测环境参数、远程监测、多场景应用等优点,具有较高的应用价值。
关键词:STM32微控制器;二氧化碳传感器;温湿度传感器;有害气体传感器;激光粉尘传感器;避障传感器
中图分类号:TN02 文献标志码:A 文章编号:1003-5168(2024)05-0009-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.05.002
Design of Multi-scene Intelligent Environment Monitoring Robot
WEI Yu CHEN Jiangli GAN Yonghui YANG Zecheng
(School of Electronics and Information Engineering, Wuzhou University, Wuzhou 543000, China)
Abstract: [Purposes] This paper aims to solve the problems of the traditional environmental monitoring system, such as single monitoring object, fixed use place and lack of flexibility, and lack of deep processing of monitoring data. [Methods] STM32 microcontroller is the core, carbon dioxide sensor, temperature and humidity sensor, harmful gas sensor, laser dust sensor, infrared module, ultrasonic module, display screen, power supply, motor, DC gear motor, buzzer, LED and Wi-Fi module are combined. Therefore, a multi-scene intelligent environment monitoring robot based on STM32 is designed to monitor and collect environmental data by robot instead of human. [Findings] C language and related STM32 algorithm were used to realize real-time monitoring of various environmental parameters such as CO2 concentration, PM2.5 concentration, PM10 concentration, air temperature and humidity, and harmful gases in the environment, as well as remote and multi-scene monitoring of environmental parameters. When the monitored environmental parameters are greater than the set reference threshold, the system sends an alarm to prompt the operator to take corresponding measures. At the same time, the robot can automatically drive and avoid obstacles in the process of environmental monitoring. [Conclusions] The design of multi-scene intelligent environmental monitoring robot has the advantages of real-time monitoring of environmental parameters, remote monitoring, multi-scene application, etc., and has high application value.
Keywords: STM32 microcontroller; CO2 sensor;temperature and humidity sensor;harmful gas sensor;laser dust sensor; obstacle avoidance sensor
0 引言
环境监测系统可以准确、及时、全面地反映环境参数及发展趋势,并为环境管理与环境决策等提供科学的依据,广泛应用于日常的生产生活中。例如温室种植大棚、工业现场、存储仓库、工厂车间等场所都需要对环境进行严格的监测把控[1-5]。但是传统的环境监测系统存在着监测对象单一、使用场景固定且缺乏灵活性、监测数据缺乏深度加工等问题,导致环境的监测不能准确地反映实时环境参数[6]。
针对以上情况,本研究设计了一款基于STM32多场景智能环境监测机器人。该环境监测机器人相对于传统环境监测系统而言,可以同时为多对象提供监测,或对同一对象进行多点检测,灵活应用于各种场所,可以代替人为到危险的环境中采集环境参数,同时可远程实时监测环境参数。当监测所得环境参数异常,则会发出警报,提示操作者做出应对措施,及时消除监测场所的危险因素。
1 主要功能
多场景智能环境监测机器人主要功能如表1所示。由电源、环境监测、避障、驱动、数据传输、报警及显示单元组成。系统利用现代信息技术、自动化技术、传感技术、控制技术、云端数据传输等技术,通过上位机和OLED显示屏实时获取各种环境参数,根据不同的监测场景分析数据,并传输至数据端,对异常数据发出警报并提示操作,及时消除环境中的危险因素。
2 硬件设计
2.1 整体设计
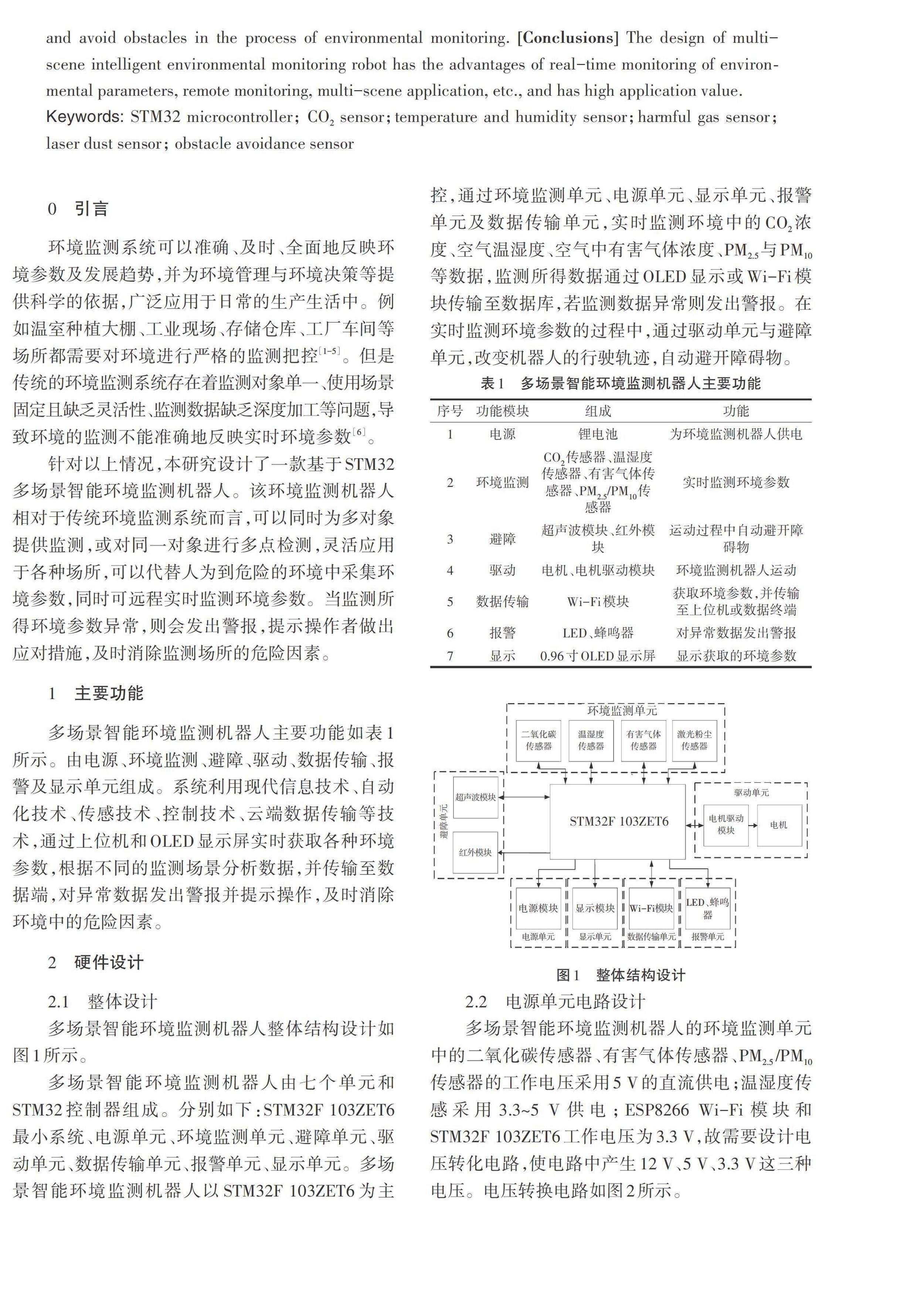
多场景智能环境监测机器人整体结构设计如图1所示。
多场景智能环境监测机器人由七个单元和STM32控制器组成。分别如下:STM32F 103ZET6最小系统、电源单元、环境监测单元、避障单元、驱动单元、数据传输单元、报警单元、显示单元。多場景智能环境监测机器人以STM32F 103ZET6为主控,通过环境监测单元、电源单元、显示单元、报警单元及数据传输单元,实时监测环境中的CO2浓度、空气温湿度、空气中有害气体浓度、PM2.5与PM10等数据,监测所得数据通过OLED显示或Wi-Fi模块传输至数据库,若监测数据异常则发出警报。在实时监测环境参数的过程中,通过驱动单元与避障单元,改变机器人的行驶轨迹,自动避开障碍物。
2.2 电源单元电路设计
多场景智能环境监测机器人的环境监测单元中的二氧化碳传感器、有害气体传感器、PM2.5/PM10传感器的工作电压采用5 V的直流供电;温湿度传感采用3.3~5 V供电;ESP8266 Wi-Fi模块和STM32F 103ZET6工作电压为3.3 V,故需要设计电压转化电路,使电路中产生12 V、5 V、3.3 V这三种电压。电压转换电路如图2所示。
2.3 环境监测单元电路设计
2.3.1 二氧化碳传感器。二氧化碳监测模块采用MH-Z14二氧化碳传感器。该传感器是一款通用的智能小型传感器[7],利用NDIR原理监测环境中的二氧化碳浓度,具备高灵敏度、寿命长、低功耗、内置温度补偿等特点。二氧化碳传感器通过STM32的串口1进行监测环境参数及数据传输,二氧化碳传感器与STM32微控制的硬件连接如图3所示。
2.3.2 温湿度传感器。温湿度监测模块采用DHT11数字温湿度传感器,为已校准的数字信号输出的温湿度复合传感器,能实时采集环境参数中的温度、湿度。在对环境进行监测时具备抗干扰能力强 ,测量精度高,响应时间快等优势。DHT11温湿度传感器与STM32微控制的硬件连接如图4所示。
2.3.3 有害气体传感器。有害气体监测模块采用由SnO2作为导体材质的MQ-135有害气体传感器。可以监测空气中的一氧化碳、硫化物、苯等有害气体,具备响应速度快、稳定性好、使用寿命长及在一定范围内对有害气体具有较好的灵敏度等特点。在对监测点进行有害气体监测时,传感器的电导率会随着有害气体浓度的增大而增大,可采用ADC方式将电导率转换为相应的电压。有害气体传感器与STM32微控制的硬件连接如图5所示。
2.3.4 PM2.5/PM10传感器。PM2.5/PM10监测模块采用FS00202激光粉尘传感器。该传感器是一款数字式的通用颗粒物浓度传感器,具备多种通信方式如IIC、USART、PWM等,利用激光散射原理对空气中的悬浮物进行监测,其具有使用寿命长、灵敏度高、响应速度快、抗干扰能力强等特点。PM2.5/PM10传感器与STM32微控制的硬件连接如图6所示。
2.4 避障单元电路设计
避障单元采用具有反应迅速的红外避障模块和具备优良方向性能的HC-HR04超声波传感器相结合[8-9]。可以解决机器人在行驶过程中使用单一传感器避障效率低及准确度差等问题,保证机器人运行安全。多路传感器采集到的各种信号发送给STM32微控制器,微控制器对不同的信号采用不同的避障策略[10]。红外避障传感器与STM32微控制的硬件连接如图7所示。
超声波传感器模块与STM32微控制的硬件连接如图8所示。
2.5 驱动单元电路设计
环境监测机器人的驱动单元件选择520直流减速电机与TB6 612FNG电机组成。直流减速电机具有扭转大、稳定性好、转速高等特点,而TB6 612FNG电机驱动模块具备双通道电路输出,可同时驱动两部电机并具有启、停、正、反转四种控制模式的优势。STM32微控制器通过PWM信号输出控制TB6 612FNG的AO/BO引脚输出不同的电压,STM32微控器IO口输出的高、低电平控制电机的运行方向。520直流减速电机、TB6 612FNG电机驱动模块与STM32微控制的硬件连接如图9所示。
2.6 数据传输单元电路设计
数据传输电路主要通过ESP8266 Wi-Fi通信模块实现。ESP8266 Wi-Fi通信模块支持TCP/IP协议与IEEE802.11协议,内置32位CPU,可独立运行,也可作为从机搭载其他主机MCU运行,进行编程时可直接通过发送指令来实现。其广泛应用于智能家居、终端数据显示、无线传感器等领域,具有较强的实用性。Wi-Fi通信模块与STM32微控制的硬件连接如图10所示。
2.7 报警单元电路设计
在环境参数的监测中,对于数据的分析是必不可少的环节,若所监测到的环境参数大于正常的环境参数,需要做出相应的警示。报警模块所使用的元件为LED与蜂鸣器,当数据异常或者到达预警值则发出警报,提示操作者及时消除监测点的不安全环境参数。报警电路的警报灯直接采用微控制器的LED0即可,而蜂鸣器采用蜂鸣器模块,蜂鸣器模块与STM32微控制的硬件连接如图11所示。
2.8 显示模块
数据显示模块采用0.96英寸OLED屏幕。OLED显示屏为自发光材料、屏幕画质均匀、反应速度快,能够直接显示监测的各种环境参数。OLED显示屏与STM32微控制电路连接如图12所示。
3 软件设计
系统主程序流程如图13所示。
系统启动后,对各个模块进行初始化,环境监测机器人开始运动,各类传感器开始监测环境参数,收集监测数据并传输至STM32微控制中。系统对数据进行整理后,通过Wi-Fi模块将数据发送至手机端或者上位机,再返回。
4 结语
本研究详细地介绍了多场景智能环境监测机器人的硬件设计与软件设计过程,并通过机器人整体测试验证了智能环境监测机器人的有效性与可靠性。结果表明,该环境监测机器人可以实时监测环境中的二氧化碳浓度、空气温湿度、有害气体及PM2.5/PM10浓度等环境参数;通过Wi-Fi模块实现远程监测及多场景监测功能;通过避障单元实现环境监测机器人自动行驶与自动避让。该机器人在实时监测环境参数过程中,对于监测异常的环境参数,系统可发出警报,及时通知工作人员消除监测点的不安全环境参数。系统的整个电路结构简单,成本较低,具有较强的实用性。
参考文献:
[1]高海超,乔雨,邵婷婷,等.智能家居环境监测系统设计与实现[J].自动化技术与应用,2023,42(3):20-22,54.
[2]卢爱红,卓云,杨佳奇.基于ARM的智能车间环境监测系统[J].现代计算机,2023,29(6):114-117.
[3]朱婧玮.基于嵌入式系统的温室大棚管控系统设计[J].南方农机,2023,54(5):22-25.
[4]雷文礼,张鑫,任新成,等.基于ZigBee的大棚環境监测系统设计[J].电子设计工程,2022,30(24):1-4,9.
[5]杨学存,薛方.基于ZigBee的环境监测小车[J].实验室研究与探索,2019,38(1):54-57,62.
[6]付政伟,杨水旺,苏一鸣,等.基于WiFi通信的室内环境监测系统设计[J].电视技术,2023,47(7):39-43.
[7]张立辉,魏立明,李春良.基于GSM网络的温室环境监测系统的设计[J].农业与技术,2016,36(9):9-10.
[8]洪一民,钱庆丰,章志飞.基于STM32的智能小车循迹避障测距的设计[J].物联网技术,2022,12(1):12-13,17.
[9]刘旭,贾雅晴. 基于STM32的智能小车可行性实践[C]//上海筱虞文化传播有限公司.Proceedings of 2022 Engineering Technology Innovation and Management Seminar(ETIMS 2022).安徽农业大学经济技术学院,2022:3.
[10]轩亮,杨轩,叶志雄.基于高尔夫球目标识别与收集的智能小车[J].江汉大学学报(自然科学版),2020,48(2):65-76.
