有人/无人机协同空战研究进展综述
2024-05-09梁晓龙张佳强
王 菡, 梁晓龙, 王 宁, 张佳强
(1.空军工程大学空管领航学院,西安 710000; 2.陕西省电子信息系统综合集成重点实验室,西安 710000)
0 引言
近年来的局部作战中,无人机所具备的小型化、低成本、高速等优势发挥了很大作用,其自主能力和智能化水平打破了传统作战的观念。但由于无人机技术的发展尚处于起步阶段,在强对抗、复杂、多任务的作战环境下,无人机的智能化水平尚未能达到完全自主,因此,有人/无人机协同空战的作战概念备受关注,目前各军事大国已竞相开展相关项目研究与试验验证,可以预见,有人/无人机协同空战将在未来空战中发挥重要作战能力。本文从有人/无人机协同空战的概念入手,以美军作战概念的发展演进为牵引,对相关项目发展、作战特点、作战运用进行了梳理和分析,最后对关键技术和未来发展进行总结和展望。
1 有人/无人机协同空战概念
有人/无人机协同空战是指有人机与无人机通过通信链路进行数据交互,组成一定队形并存在指挥协同关系,通过合理配置作战资源和分配作战任务,高效完成作战任务[1]。有人/无人协同空战系统由有人机、无人机、指挥中心、通信链路4个部分组成[2],各组成部分功能和关系如下。1) 有人机:接收指挥中心的态势信息支援和指挥引导,通过分析战场环境和态势信息,进行实时决策,如任务分配和路径规划等。当有人机接收到目标或威胁的信息时快速完成战术决策,控制无人机进行协同攻击。2) 无人机:在指定任务区域对目标实施侦察、监视、探测、识别与跟踪,并将目标信息传回有人机,在有人机的指挥控制下,快速完成对目标的攻击计算,辅助有人机完成决策,并完成协同攻击。3) 指挥中心:利用侦察探测系统收集初始战场态势信息,并通过通信链路将信息分发至各有人/无人系统,提供决策支持,同时为协同作战提供指挥引导。4) 通信链路:可以完成有人机与无人机之间快速的信息交换,为协同作战提供信息保障,具备实时化、可靠性高、高速宽带的特点。
2 国外空战发展演进
2.1 作战概念发展
近年来,面对变化的作战环境、作战对手和作战任务,尤其是中俄军事能力的快速增长,美军为应对“反介入/区域拒止”的挑战,相继提出了作战云(Combat Cloud)、分布式作战、敏捷作战、穿透性制空作战、马赛克战等新型作战概念,如表1所示。由于概念的提出背景以及相应的技术支撑和面临的问题不同,故其能力特点的侧重点不同。
表1 美军作战概念发展及其内涵
由表1可以看出,战争形态正在由有人机作战向有人/无人机协同作战转变[3]。面对对手防御和打击能力的快速提升,美军对智能化、自主化无人系统的发展高度重视,通过降低作战成本,提高作战复杂度和协同能力获取作战优势。但由于无人系统智能化、自主化水平有限,尚不能完全实现智能化、自适应、自组织、能力涌现等能力,因此,有人/无人机协同空战成为现阶段协同空战的主要形式,也是未来发展无人机协同空战的重要支撑。
有人/无人机协同空战作为一种新型作战样式,具备以下的功能。1) 智能化决策能力:以人工智能和自主系统为支撑,无人机能够根据态势信息在相应权限内进行自主决策,配合有人机实施作战。2) 分布式作战体系:作战资源、信息、能力具备分布式的特点,能够灵活地进行资源组合与信息融合,平台的能力组合更加多样化。3) 融合多域实现跨域作战:具备多个相互连接的节点,这些节点通常由无人机担任,融合多个作战领域的资源,协调使用不同作战领域的力量,为己方有人机提供决策优势。
2.2 相关项目发展
在作战云等新型作战概念的牵引下,美军在体系、指挥控制和平台上先后提出了体系集成技术和试验(SoSITE)、拒止环境下协同作战(CODE)、空战演进项目(ACE)、忠诚僚机(Loyal Wingman)、天空博格人(Skyborg)、下一代空中主宰(NGAD)等一系列相关项目,欧洲则发起未来空中作战系统(FCAS)项目。上述项目对有人/无人机协同空战不断进行探索和验证,发展无人机平台作战能力,充分发挥有人/无人机协同空战的作战效能。
2.2.1 体系集成技术和试验(SoSITE)
DARPA于2015年公布了SoSITE项目,为了保持美军在高对抗环境中的武器投射能力和空中优势,通过分布式航空作战体系架构研究,发展能够快速集成任务系统/模块到体系的技术,研究验证体系对抗的有效性以及体系架构的稳定性。
SoSITE通过创新的体系架构发展和演示保持空中优势能力的概念,体系架构中包含飞机、武器、传感器和任务系统并把空战能力分布于大量可互操作的有人和无人平台上。图1为SoSITE项目概念图。
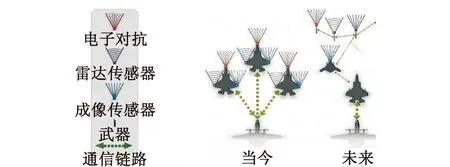
图1 SoSITE项目概念图Fig.1 Concept of SoSITE
当今的作战模式是派出3架有人机执行任务,每架有人机都具备电子对抗、雷达传感器和成像传感器,并挂载相应的武器,它们同时与空中指挥平台通信,并受其指挥控制。在未来SoSITE项目的作战模式下,仅需派出1架有人机和1架无人机执行任务,由空中指挥平台控制有人机,有人机控制无人机,无人机搭载了具备电子对抗、雷达传感器、成像传感器的平台以及武器平台,这些功能呈现分布式的特点,这将解决高成本、多用途平台的固有问题,快速且低成本地将全新技术和航空系统集成到现有的空中系统,大大提升作战效能。
2.2.2 拒止环境中协同作战(CODE)
DARPA于2015年提出的CODE项目在SoSITE的开放式系统架构的基础上提高平台的自主、协同能力。CODE研究先进的自主化算法和监督控制技术,目的是增强无人机或尖端导弹在拒止环境的作战能力,其研究重点是协同自主领域技术,该技术可以使无人机组在一个指挥人员的管理下协同作战。无人机对自身以及周边环境进行判断,并向指挥人员反馈无人机组的行动建议,指挥人员可以给出允许/不允许无人机执行行动的建议,或让无人机组收集更多的数据。CODE技术的优势有:1) 无人机有更大的几率发现目标;2) 能够支撑指挥人员同时管理多架执行不同任务的无人机;3) 使有人/无人机协同空战系统更具灵活性;4) 能够组合不同的低成本无人机,提高无人机的任务效率和成本效率,增强空中平台在拒止环境中的生存率和作战效率。
2.2.3 忠诚僚机(Loyal Wingman)项目
Loyal Wingman项目是由美国空军研究实验室于2015年发起的,目的是第五代战机的驾驶员(长机)可以对无人机(僚机)进行控制,提升有人/无人机协同空战能力。忠诚僚机指具有自主性的无人作战飞机,可执行对空对地攻击、诱饵、电子战、情报/监视/侦察等多种任务,能以较低成本实现更强的空中作战能力,是无人机向主战方向发展的代表机型[4]。忠诚僚机集成了自主飞行与人工智能技术,与有人机组成编队协同飞行,携带不同的载荷,可以实现不同的作战功能,比如携带机载武器时可以充当有人机的弹药库,携带传感器时为有人机的协同打击提供目标指示和导引,携带电子战载荷时为有人机提供电子支援[4],另外,忠诚僚机的作用还有保护有人机,降低有人机损失以及飞行员的伤亡。自忠诚僚机项目提出以来,美军研制了如UTAP-22灰鲭鲨无人机、Demogorgon“魔王”无人机、MQ-20无人机等不同型号的忠诚僚机,并进行了试飞验证。
2.2.4 天空博格人(Skyborg)
Skyborg项目在Loyal Wingman项目的基础上,对系统和平台提出了更高的要求,于2020年5月正式发布项目提案。Skyborg要求系统和平台具备开放、弹性、自主的特点,其采用开放式架构、模块化设计,能够快速插入新能力,且具备通信、导航、自主能力,即便其无法与外部连接,仍能够独立决策并发挥作用,同时成本较低,具备可消耗性。
截至目前,Skyborg项目的软件系统已装备于无人机并进行了多次试飞,其自主核心系统(ACS)完成了一系列安全系统操作所必需的基本运行功能,并验证了低成本可消耗性无人机军事应用的可行性。图2所示为Skyborg项目试飞验证场景。

图2 Skyborg项目试飞验证Fig.2 Verification of Skyborg
由图2可知,装有Skyborg软件系统的一架无人机与F-22、F-35协同飞行,充当数据链节点,使这两种数据链不兼容的有人机实现通信。
Skyborg项目还提出了分层式作战构想,装备有Skyborg的忠诚僚机能够在更大的空战环境中与有人机协同作战。图3所示为Skyborg项目分层式作战构想。
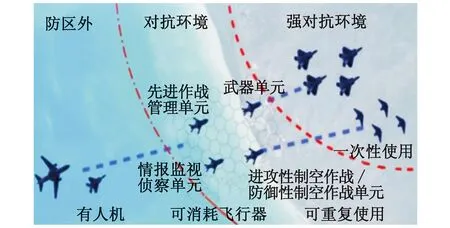
图3 Skyborg项目分层式作战构想Fig.3 Layered operational concept of Skyborg
由图3可知,无人机在对抗环境中执行任务,有人机在防区外(非对抗环境中)执行任务。其中,具备隐身性能的无人机(包括高自主性的协同作战飞机和可消耗无人机)在强对抗环境中作战,搭载不同有效载荷的无人机在对抗区域支持各种作战任务的执行,携带先进作战管理系统(ABMS)的无人机可以作为通信和数据共享节点,为在非对抗和强对抗环境中的飞机传递关键信息。
2.2.5 未来空中作战系统(FCAS)项目
FCAS项目于2017年正式发布,其目的是通过作战云将有人战斗机和各型无人机融合为协同空战体系,并与地面、海上和空间领域的系统实现融合。
FCAS由下一代武器系统(Next-Generation Weapon System,NGWS)及其他未来空中作战平台组成,其中,NGWS包括新一代战斗机、无人机和用于协同作战的作战云。NGWS包含多种设计,从小型可扩展无人机到重型忠诚僚机,同时引入模块化设计思想,同一平台可能具有情报监视侦察、目标捕获与识别、电子战、空战等多种作战能力。为实现有人/无人机协同空战,有人机和无人机将通过作战云进行连接,飞行员通过系统设置任务并将其发送至无人机,同时,无人机也能够在系统的协调下自主分配和执行任务。
从FCAS的发展可以看出,其发展思路与美军Skyborg项目不同。FCAS为实现有人/无人机协同空战的能力,将有人/无人机协同空战系统作为统一的整体进行开发,这样更有利于有人机和无人机的密切协同,提升协同效能。
2.3 有人/无人机协同空战特点
通过分析美军和欧洲相关项目的概念与发展,总结出有人/无人机协同空战特点,如表2所示。
表2 有人/无人机协同空战特点
3 有人/无人机协同空战场景
随着无人机自主水平和智能化指挥控制能力的提升,有人/无人机编队更具灵活性,能够快速适应复杂的威胁环境,有人/无人机协同在空战中的运用场景趋于多样化。本文介绍了有人/无人机协同空战的运用场景,并对其具体作战流程展开描述,分析了有人/无人机协同的作战运用效果。
3.1 协同空战场景分析
面对亚太地区主要国家“反介入/区域拒止”(A2/AD)能力的迅速发展,依靠防区外打击获得空中优势的传统制空作战面临着巨大的挑战。在美军第三次抵消战略的推动下,有人/无人机协同空战的新型作战方式的研究实现了快速发展。图4所示为穿透性制空作战场景。
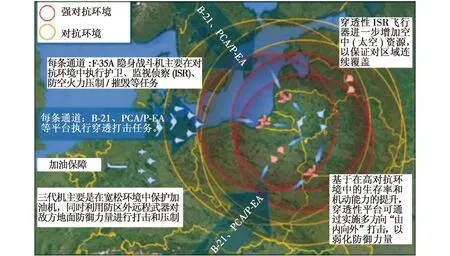
图4 穿透性制空作战场景Fig.4 Scenarios of penetration airspace control
由制空战斗机和小型可消耗无人机组成有人/无人机协同编队进行制空作战,各兵力单元作战任务和能力如表3所示。
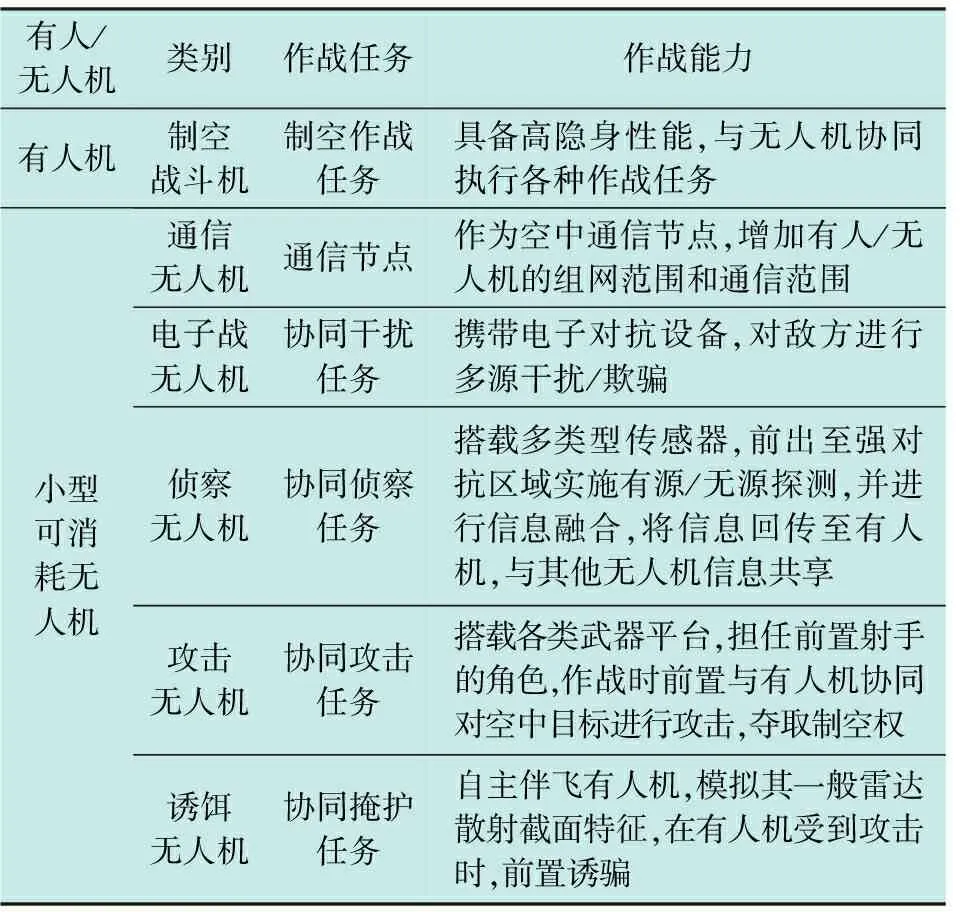
表3 各兵力单元介绍
3.2 作战流程分析
制空作战的流程分为3个阶段,分别为侦察监视阶段、制空作战阶段和作战评估阶段,本文将讨论这3个阶段的作战流程以及其中的有人/无人机协同的作战运用。
1) 在侦察监视阶段,侦察无人机和通信无人机接收指令飞达作战区域中强对抗环境,制空战斗机在安全区域巡逻待战。侦察无人机利用其低成本、可消耗性以及高隐身的性能,在作战区域内实施搜索、侦察、跟踪、监视任务,同时,通信无人机迅速部署形成空中通信网络,将侦察无人机获得的敌方信息实时、高效地回传至制空战斗机,并与其他无人机信息共享,再由有人机进行信息融合,进一步做出决策。
2) 在制空作战阶段,制空战斗机根据作战环境和作战需要飞至对抗环境中实施制空作战,同时,攻击无人机、诱饵无人机、电子战无人机飞至强对抗环境与有人机协同作战。攻击无人机与制空战斗机对敌方空中力量进行协同攻击,协同方式有以下两种:① 制空战斗机融合战场态势信息,根据侦察无人机传回的敌方目标信息做出决策,并将决策以指令的形式下发至攻击无人机,攻击无人机根据指令对目标进行打击;② 无人机自主伴飞制空战斗机,无人机能够根据共享态势信息进行自主决策,与制空战斗机进行协同制导,或为制空战斗机提供武器支持,提高目标打击精确度和毁伤效能。诱饵无人机自主伴飞制空战斗机,当制空战斗机处于威胁区域中时,诱饵无人机自主机动,并模拟制空战斗机的一般雷达散射截面特征,诱骗敌方火力,必要时牺牲自己以保证制空战斗机的安全。电子战无人机利用电子对抗设备对敌方有人/无人机进行干扰/欺骗,压制敌方飞机的侦察、探测、通信功能。在整个制空作战阶段,侦察无人机在强对抗环境中充当侦察节点,对敌方态势进行侦察监视,通信无人机充当通信节点,为整个有人/无人机编队提供通信网络。
3) 在作战评估阶段,攻击无人机将协同攻击视频回传至制空战斗机,侦察无人机将态势信息回传至制空战斗机,制空战斗机对所有作战态势信息进行融合分析,做出下一步决策:继续执行下一轮攻击任务或撤出战场。
3.3 有人/无人协同运用分析
通过分析制空作战的作战流程,总结出有人/无人机编队在3个阶段的协同过程和协同效果如表4所示。
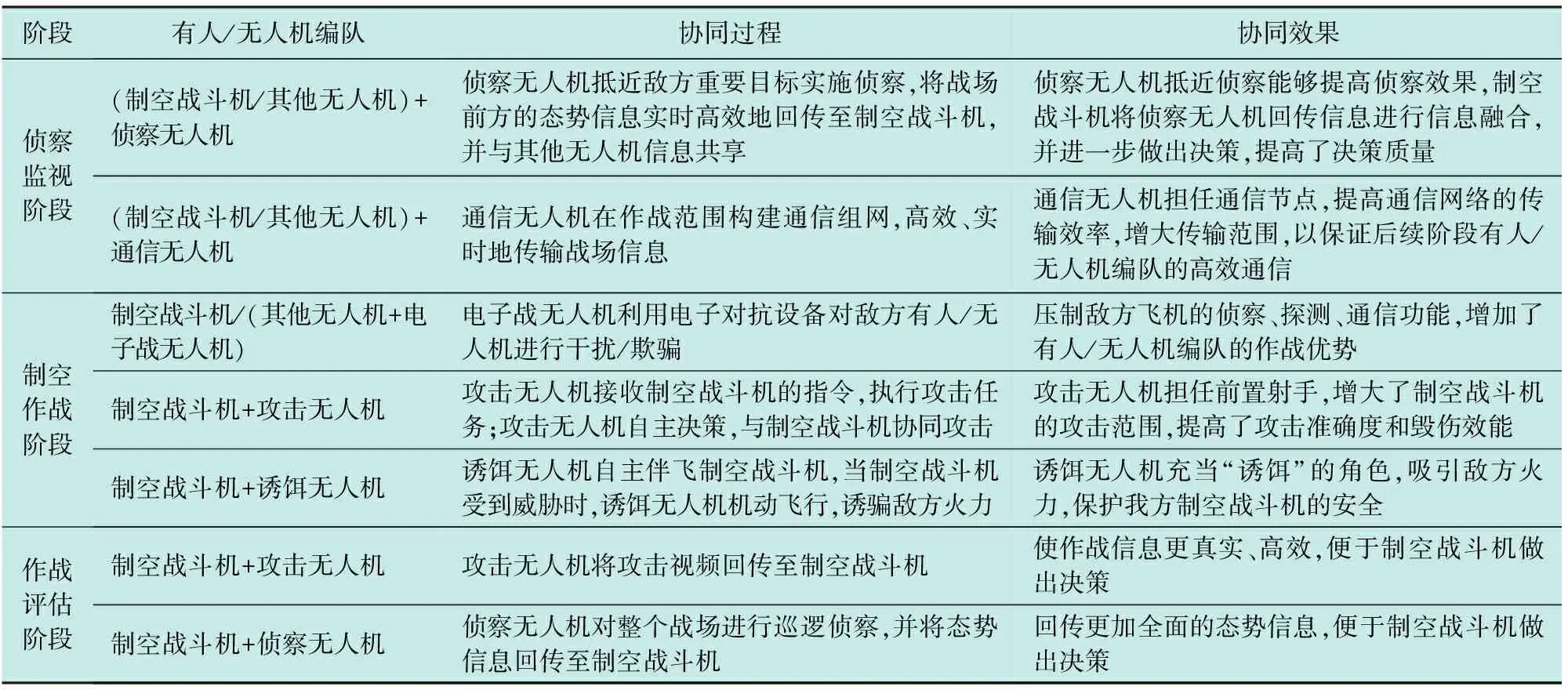
表4 有人/无人协同分析
4 关键技术与未来发展趋势
4.1 关键技术
4.1.1 航迹规划
航迹规划是综合考虑自然环境、战场威胁等条件以及有人/无人机自身性能,按照航迹规划方法,为有人/无人机提前规划出合理的飞行轨迹,使有人/无人机能够遂行侦察[5-6]等任务。根据本文制空作战的任务场景,有人/无人机协同空战航迹规划问题的研究主要分为两类:1) 侦察航迹规划,目的是提高无人机的侦察效率,降低目标的不确定性[6];2) 安全航迹规划,目的是为有人/无人机提供安全可行的飞行航迹,避免冲突碰撞,提高作战效率。有人/无人机协同空战航迹规划问题的解决方法主要有传统优化算法和智能优化算法两类。传统优化算法包括人工势场法[7]、快速扩展随机树法(RRT)[8]、Dijkstra法[9]、Voronoi法[10]、动态规划法[11];智能优化算法包括A*算法[12]、蚁群算法[13]、遗传算法[6]、粒子群算法[14]。
在侦察航迹方面,随着战场环境越来越复杂,侦察目标数量越来越多,且呈集群化趋势发展,传统点对点的航迹规划已经无法满足作战需求。文献[15]针对多目标的侦察航迹,考虑目标的复杂性、避免目标被重复侦察等问题,提出了解决多无人机协同侦察航迹规划的方法,提高了航迹规划的效率和精度。
在安全航迹规划方面,文献[16]分别针对航迹规划中成本高、精度和稳定性差、地形变化影响,以及复杂环境中的实时性问题开展研究,提高了安全航迹规划的性能和适应性。
在以上航迹规划问题的研究中,主要为有人机或单无人机以及无人机集群的航迹规划问题,没有根据有人/无人机协同的特点,针对有人机和无人机协同时如何进行航迹规划展开研究。文献[17]通过分析有人/无人机协同系统的体系结构和控制流程,建立系统的运动模型,并根据其任务特点,设计航迹规划器和编队规划器,提出了一种有人/无人机协同系统的航迹规划方法。通过总结研究现状,目前针对有人/无人机协同空战航迹规划问题的研究资料较少且不够深入。
4.1.2 空战决策
有人/无人机协同空战场景中的空战决策主要包括无人机的自主决策问题、多架无人机协同决策问题和有人/无人机协同决策问题3个方面。
1) 在无人机自主决策问题方面,无人机在空战过程中自主决策的研究方法主要分为矩阵博弈方法[18]、微分博弈方法、专家系统方法[19]和机器学习方法4类。其中,机器学习方法为无人机在空战过程中的自主决策提供了有力的技术支持[20]。
2) 在多架无人机协同决策问题方面,文献[21]分别对多无人机的协同攻击决策、协同机动决策和任务分配开展研究,为多无人机的协同决策提供了较好的解决方法。
3) 在有人/无人机协同决策问题方面,主要是关于有人/无人机协同决策机制和模型研究[22],为有人机监督无人机执行任务过程中的协同决策问题提供了思路。
综合分析以上研究,目前有人/无人机协同决策的研究主要集中于机动决策问题,关于有人/无人机如何在空战过程中,在决策机制的指导下,实现目标分配、航迹实时规划、机动决策等协同决策的研究内容较少。另外,针对有人/无人机协同决策问题研究不够深入,只能通过协同决策机制判断出无人机是否需要有人机干预决策,无法将有人机的决策指令通过智能化技术运用于无人机自主决策,从而实现智能化的有人/无人机协同决策。
4.1.3 编队控制
编队控制是指有人/无人机编队在执行任务过程中,形成并保持满足性能指标、飞行约束、任务目标等要求的几何构型[23]。现有有人/无人机协同编队控制方法主要分为4类,分别是领航-跟随法[24]、虚拟结构法[25]、基于行为法[26]和基于一致性理论[14]。从作战需求的角度考虑,有人/无人机协同空战的过程中主要需要解决编队队形生成与保持、编队重构、编队避障3个问题。
针对编队队形生成与保持的问题,文献[27]采用全局渐近稳定控制的方法,通过调整较少参数实现多无人机编队在三维空间下的队形保持;文献[28]设计了一种基于“长机-僚机”相对运动模型的自适应控制律,考虑了风场的不确定性;文献[29]采用领航-跟随策略设计一种有人/无人机编队队形保持控制器,解决了有人/无人机编队飞行过程中的队形保持问题。针对编队重构的问题,文献[30]通过研究编队飞行与雁群行为机制之间的仿生映射机理,解决了编队重构问题;文献[31]针对复杂电磁环境下无人机编队重构问题,采用紫外非均匀势场对传统人工势场进行改进,实现无人机编队重构。针对编队避障的问题,文献[32]考虑无人机编队沿参考轨迹飞行时遭遇突发障碍物而发生碰撞的情况,采用虚拟结构编队策略和非线性模型预测控制方法,设计了一种分布式编队控制器;文献[33]考虑无人机集群在避障期间的队形丢失、任务失效等问题,设计基于改进人工势场和基于一致性协议的协同避障算法;文献[34]引入碰撞预测机制来实现集群避障的队形控制。
在编队控制的问题研究中,针对各种复杂情况下的同构无人机集群编队队形生成和保持、编队重构、编队避障问题研究较为深入,但针对异构无人机集群和有人/无人机协同编队的编队控制问题研究较少,缺少对编队异构特性、控制律设计,以及相关稳定性分析方法运用的考虑。
4.2 未来发展趋势
根据第2章分析有人/无人机协同空战的作战特点,以及第3章对作战运用和关键技术的梳理总结,结合其目前存在的研究难点,为有人/无人机协同空战提出以下发展建议和探索方向。
4.2.1 不确定环境下的协同航迹规划技术
有人/无人机协同航迹规划问题是一个多约束、强耦合、非线性的复杂问题,加之现实作战环境中存在许多不确定因素,目前结构化环境下的航迹规划方法很难满足作战要求。本文通过对有人/无人机协同空战场景的具体分析,总结归纳航迹规划问题的研究方法,基于当前的研究现状,今后可以从以下两个方面对不确定环境下的协同航迹规划技术开展研究:1) 建立贴合战场环境的航迹规划模型,对战场环境中的不确定性因素进行表征,并融合到航迹规划模型中,使建立的模型更符合实际战场环境;2) 采用多种算法融合的航迹规划技术,利用算法的互补性,将多种优化算法融合用于协同航迹规划[35]。根据有人/无人机协同空战的不同阶段,采用不同的算法,充分发挥其优势。
4.2.2 复杂作战环境下的协同空战决策技术
复杂作战环境下的有人/无人机协同空战决策技术是当前有人/无人机协同空战面临的技术难点。当前针对空战决策的研究主要集中在单个无人机的机动决策和多架无人机的协同攻击决策和机动决策,针对复杂作战环境下的有人/无人机协同空战决策的研究内容较少且不够深入。面对复杂的战场环境,有人/无人机协同空战具有约束条件复杂、编队构型多、决策类型多的特点。多智能体强化学习在未来有人/无人机协同空战的空战决策中具有巨大潜力,使系统能够在多约束条件下的作战环境中,实时、高效地做出决策。根据不同有人/无人机编队构型,构建不同的策略函数,以此来实现不同的决策机制。将复杂作战环境中的各种约束抽象为不同的奖励函数,以有效应对复杂环境并做出决策,提高有人/无人机协同空战决策的鲁棒性和实时性。
4.2.3 异构系统模型的协同编队控制技术
在本文有人/无人机协同空战的背景下,有人/无人机协同编队是一个异构系统,即由动态特性不同的有人机和无人机组成的系统。相比于同构系统,异构系统的编队控制技术研究更加复杂,也更具有实际价值[36]。基于当前研究现状,可以从以下几个方面对有人/无人机协同编队的异构编队控制技术开展研究:1) 为有人/无人机协同编队选择合理的编队结构,提高其信息交互效率和实时性;2) 围绕有人机和无人机的异构特性开展研究,在设置控制器时考虑有人/无人机的异构参数,结合多种控制算法组建控制系统;3) 根据有人机和无人机的异构特性,采取合适的稳定性分析方法。
5 结论
本文从概念、发展演进、作战运用场景以及关键技术4个方面对当前有人/无人机协同空战的研究进行了综述。在概念方面,本文根据有人/无人机协同空战的概念,分析其组成部分及功能。在发展演进方面,以美军作战概念的发展为牵引,梳理了美军相关项目的发展演进,并分析了有人/无人机协同空战的特点。在作战运用场景方面,以穿透性制空作战为背景,分析有人/无人机协同空战流程及其带来的作战效果和作战优势。在关键技术方面,从航迹规划、空战决策、编队控制3个方面入手,梳理了相关研究现状,并展望了其未来发展趋势。
