永磁同步电机动态模型预测控制设计
2024-05-07陈振刚贾洪平
陈振刚,贾洪平
(江苏大学电气信息工程学院, 江苏 镇江 212013)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)以其体积小、转矩大等优势,已广泛应用于新能源电动汽车、飞行器等领域。PMSM系统模型具有较强的耦合性。其控制方法较为复杂。主要的PMSM控制方案有磁场定向控制(field orientation control,FOC)和直接转矩控制(direct torque control,DTC)。FOC动态响应速度较慢,需要复杂的比例积分微分(proportional integral differential,PID)参数整定和解耦算法。DTC稳态转矩脉动较大,导致低速特性不够理想[1-2]。近年来,随着电力电子和数字信号处理技术的快速发展,有限集已经逐渐运用于电机控制系统。模型预测控制(model predictive control,MPC)采用多步预测、滚动优化和反馈校正的控制方法。相比于FOC 和 DTC, MPC具有控制灵活度高、易于处理系统非线性约束、可实现多目标优化等优点。文献[3]采用MPC控制器代替电流环的比例积分(proportional integral,PI)控制器,省去了PID参数整定环节,控制效果与传统PI控制相当。文献[4]首先在x、y轴下建立了模型预测DTC模型,无需模型离散化和转子旋转坐标变换;然后重新设计了成本函数,将转矩控制和磁链控制纳入考虑。这简化了备选电压矢量、提高了控制效率。文献[5]首先将系统中逆变器的开关频率加入成本函数;然后根据电机运行状态,使用模糊控制器输出稳态开关次数权重系数,降低了逆变器开关频率。这可以有效抑制转矩与磁链脉动。文献[6]首先计算期望电压矢量的扇区区间,并选取此区间的非零电压矢量和零电压矢量作为下一时刻的备选电压;然后将7个备选矢量减少到3个,以减小计算量。但由于备选矢量的减少,文献[6]系统的动态性能较差、转速超调量较高。
本文在简化备选电压的基础上作进一步优化,提出PMSM动态MPC设计。试验结果表明,PMSM动态MPC既能简化计算过程,又能保持良好的动态特性。
1 数学模型
PMSM采用三相交流电供电。PMSM数学模型具有多变量、强耦合和非线性等特点。本文以表贴式PMSM为研究对象。表贴式PMSM的特点是定子压轴的电表量等于定子交轴的电感量。dq坐标系实现了电机磁通和转矩的重构和解耦,促进了控制系统的实用化。PMSM在dq坐标系中的模型为:
(1)
式中:ud与uq分别为定子直轴与交轴电压;Id与Iq分别为定子直轴与交轴电流;R为定子电阻;ωe为电转子角速度;Ψd与Ψq分别为定子直轴与交轴磁链,Ψd=LdId+Ψf,Ψq=LqIq。其中:Ld与Lq分别为定子直轴与交轴电感。
定子电流的状态方程为:
(2)
式中:L为定子电感;Ψf为永磁体磁链[7-9]。
本文采用一阶欧拉方法,可以得到电流的微分形式:
(3)
(4)
式(4)可以转化为:
xdq(k+1)=A(k)Idq(k)+BUdq(k)+F(k)
(5)
式中:Idq、Udq分别为dq坐标系下的电流值与电压状态值。
预测电流值可由当前电流值和当前电压值计算得到。
2 传统MPC策略
传统FOC由转速外环和电流内环这2个负反馈组成,通过转速外环和转速内环的PI控制,使系统达到稳定运行状态。
转速外环是控制系统中的1个闭环反馈控制环节,用于控制运动系统的速度。它通常由速度传感器、控制器和执行器这3个主要组件构成。在转速外环中,速度传感器用于测量当前的运动速度并将其反馈给控制器。控制器根据设定的目标速度和实际测量到的速度之间的误差,生成相应的控制信号。这个信号进一步传递给执行器,如电机或液压驱动系统,以调整输出力或转矩,从而改变运动系统的速度。通过持续的测量和调整,转速外环能够使运动系统的速度保持在期望的范围内,从而实现精确的速度控制和调节。
电流内环可使电机以恒定的电流运转,从而产生恒定的加速力矩。电流内环指电流反馈系统将输出电流采用负反馈的方式接入处理的环节。电流内环主要通过提高电流的稳定性来提高系统的性能。提高系统性能对转动惯量大的电机而言比较重要,可以使电机一直以固定的电流驱动电机运转。驱动电流不会因为转速的升高而下降。
PI调节器的积分作用指调节器的输出与输入的偏差对时间的积分成比例的作用。积分调节作用有两大特点。一是调节作用的输出与偏差存在的时间有关,只要偏差存在,积分调节器的输出就会随时间增长,直至偏差消除。二是积分作用缓慢,且在偏差刚刚出现时调节作用很弱,不能及时克服扰动的影响,致使被调参数的动态偏差增大。积分作用在阶跃作用时:首先有1个比例作用输出;随后在同一方向上,基于比例输出,调节器输出不断增加。这样既克服了单纯比例调节存在静差的缺陷,又克服了积分作用调节慢的缺陷,即静态和动态特性都得到了改善。因此,PI调节得到了广泛应用。
MPC则保留了转速外环,并在电流内环采用MPC算法代替PI调节器。MPC算法通过预测找到最优电压矢量。本文所使用的三相两电平逆变器,可产生8个开关组合[10]。
开关组合如表1所示。

表1 开关组合
由表1可知,控制序列中的8个开关组合,可得到6个有效电压矢量以及2个零矢量。根据8个电压矢量可以得到8个电流预测值。
因为有2个零矢量得到的电流预测值相同,所以只需进行7次电流预测。预测方法为:将预测的电流值代入成本函数中,选择成本函数最小的电压矢量输出。
控制系统结构如图1所示。
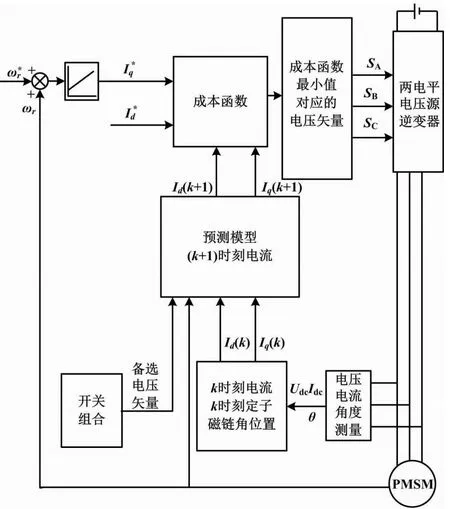
图1 控制系统结构
控制系统流程如图2所示。
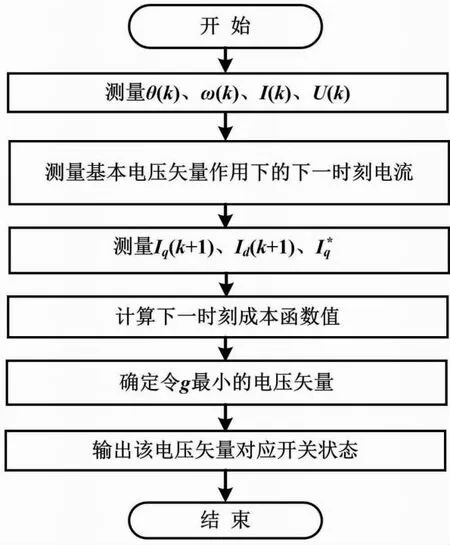
图2 控制系统流程图
成本函数g为:
(6)
传统MPC解决了单矢量模型预测电流控制中稳态纹波大、系统稳态性能较差的问题。但是传统MPC存在开关频率高且计算量大的问题,限制了其实际应用。
3 简化MPC策略
传统MPC控制策略的动态响应和静态响应表现较好,但每次求取最佳开关组合时都要将备选电压矢量代入计算式,并必须进行7次预测,因而计算所占用的时间较长。这就造成速度跟踪比传统矢量控制慢、对芯片的要求也比较高,不适用于低成本系统。在传统MPC策略的基础上,本文对原有的备选矢量进行了简化,得到了简化MPC策略。
通过控制系统的负反馈,可以得到下一时刻的期望电压矢量。在传统矢量控制中,这一电压矢量通常由期望电压所在扇区的2个邻边电压矢量和零电压矢量合成而得。如果知道期望电压矢量所在扇区,则只需在该扇区边界与零矢量3个电压矢量之间进行选择即可。这种简化MPC策略减少了备选电压矢量数目、缩短了计算时间[11-13]。
简化MPC电压矢量选择方式如图3所示。
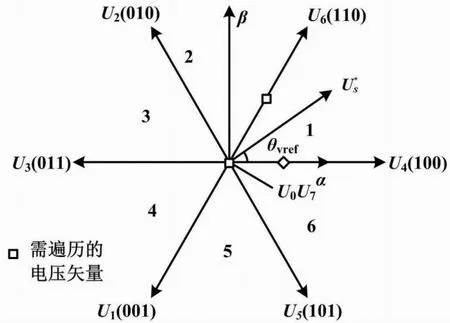
图3 简化MPC电压矢量选择方式
简化MPC的关键部分是确定期望电压矢量所在扇区(即θvref)的大小。
PMSM空间矢量如图4所示。
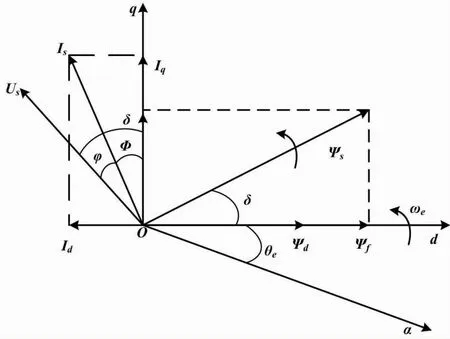
图4 PMSM空间矢量图
当忽略定子电阻时,定子磁链ΨS与定子上的电压矢量US的相角差为0.5 π。
由图4可知,电压矢量的角度θv为:
θv=θe+δ+0.5 π
(7)
(8)
(9)
(10)
在得到扇区的具体信息后,本文将2个边缘备选电压矢量和零矢量电压代入预测模型,并通过成本函数选择最佳电压矢量。
简化MPC策略在传统策略的基础上,将8个备选电压矢量简化到3个,大幅减少了预测时间和计算过程。这使MPC得到了进一步的推广。
4 预测时间补偿
MPC虽然控制简单,却存在预测结果落后于当前状态这个根本问题。为此,需要在系统模型中提前一步预测,以补偿系统损耗的时间。
在软件运行中,电流采样、成本函数计算都需要一定时间。如果只在开始时刻进行电流的采样和预测,就无法确定采样和计算时间施加的电压矢量。解决办法只有进行提前预测。当需要得到(k+1)时刻最优电压矢量时:首先在k时刻,利用[k-1,k]时间段得到k时刻最优电压矢量;然后计算(k+1)初始时刻电流参数(即k时刻结束时电流值);最后利用此电流参数和备选电压矢量合集预测(k+1)时刻结束时电流值,并通过成本函数找到最优值。因为此过程基本都在[k,k+1]时间段内进行,并在(k+1)时刻开始前就已经计算出开关组合,所以没有采样计算延时问题。在此过程中,由于转速外环变化慢、电流内环变化快,可以认为参考电流矢量没有变化。
延时补偿的工作过程如图5所示。
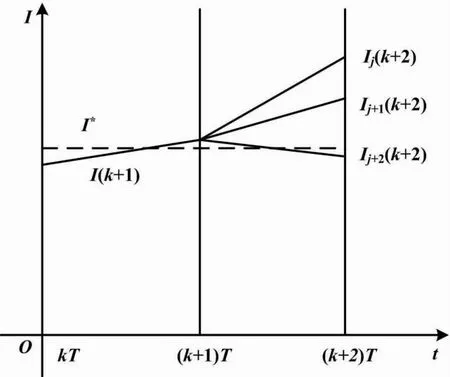
图5 延时补偿的工作过程
简化MPC流程如图6所示。
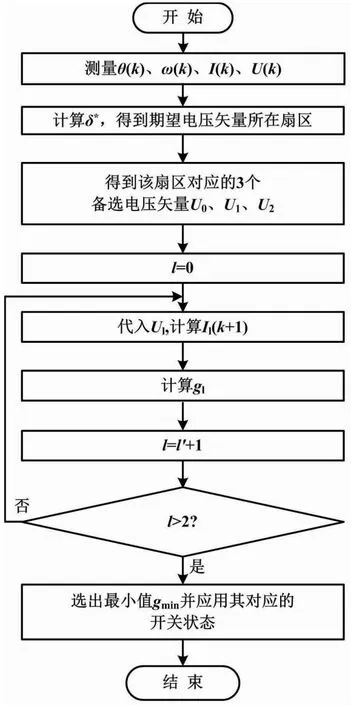
图6 简化MPC流程图
5 动态MPC
通过多次试验可知,简化MPC由于将备选电压矢量从8个精简到3个,造成在初始时刻转速超调量高、上升慢以及电流脉冲高。当转速稳定之后,高转速可以减弱简化备选电压矢量带来的影响。即使之后负载转矩或额定转速发生变化,简化策略相比传统策略并无太大变化。
出现这个问题的主要原因是低转速时,电压矢量的选择不够灵活。本文的解决策略是当检测到电机处于低速时,补全备选矢量,提供8个电压供系统选择;当转速提高并稳定之后,使用简化策略,以缩短计算周期,减小系统损耗。鉴于转速的变化慢,切换的时机难以选择。但电流对于转速的改变反应比较灵敏。因此,本文在系统中增加电流变化的检测。系统使用的是Id=0的控制方法。当电机趋于稳态时,电流Id会在零轴线小范围浮动,此时使用简化MPC。当电流Id在零轴线大范围波动时,认定系统处于动态变化过程。这时使用传统MPC,以扩大备选电压矢量范围、减小超调量,使系统更快地到达稳态。
本文设电信转化导数为Ide。当Id<|Ide|,采用简化MPC;当Id>|Ide|,采用传统MPC。
6 仿真试验
本文在Matlab平台搭建 PMSM 仿真控制系统,分别采用传统MPC、简化MPC和动态MPC进行仿真对比, 从而验证动态MPC的控制性能。PMSM 基本参数如下:定子电阻为2.875 Ω; 定子d轴电感Ld为8.5 mH;定子q轴电感Lq为8.5 mH; 极对数P为4 p;Ψf为0.175 /Wb;转动惯量J为0.001 kg·m2;阻力系数B为0.008 N·m·s。试验设置直流母线侧电压为311 V;Ide为0.15 A;速度环PI参数选取为KP=0.14、KI=7;输出限幅为[-30,30];系统仿真时间设置为0.4 s;电机初始给定转速为800 r/min,0.25 s后变为1 000 r/min;初始负载转矩为0 N·m,在0.15 s后突变为10 N·m。
MPC控制转速变化对比如图7所示。
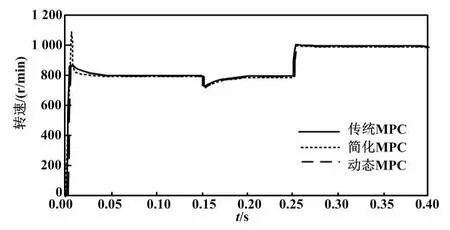
图7 MPC控制转速变化对比
由图7可知:传统MPC的负载速度控制较好;简化MPC由于备选电压矢量少,初始时刻超调量大;简化MPC在转速上升之后,高转速可以适当弥补此缺陷,负载和速度的跟踪也能达到传统MPC的控制效果;动态MPC结合了两者的优点,既有较小的超调量,又有不错的动态响应。
MPC控制电路变化对比如图8所示。
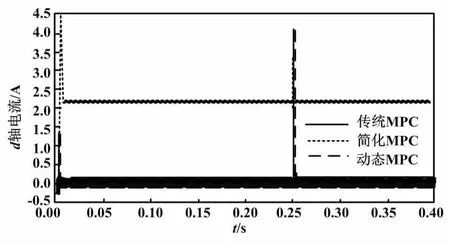
图8 MPC控制电路变化对比
动态MPC控制在初始时刻采用传统MPC策略,减小了启动电流、减轻了设备负载压力。在中高速时刻采用简化MPC策略。
7 结论
本文利用电流系数Ide,将传统MPC策略和简化MPC策略相结合,提出动态MPC策略。该策略在低速的时候增加备选电压矢量;中低速的时候减少备选电压矢量。动态MPC策略既降低了算法的计算时间、缩短了开关周期,也保留了较好的动态响应。仿真结果表明,该策略不仅有良好的动静态性能,还具有开关频率较低、计算量小的优势。对于电流系数Ide值的选择,本文只是列举了一种情况。在实际工程应用中,可以采样模糊控制策略,根据电机速度对Ide进行动态赋值。
