变电检修智能机器人设计与实现
2024-05-07李生杰郭子阳佘晓阳
刘 乾 李生杰 郭子阳 佘晓阳
(国网江苏省电力有限公司淮安市洪泽区供电分公司)
0 引言
随着社会经济的发展,以及工业生产规模的不断扩大化,对于电力供应的安全性、可靠性、稳定性提出了更高的要求。变电站作为电力系统中的核心基础设施,是为工业生产和日常生活传输电力的重要环节[1]。大多数变电站处于露天环境,其工作稳定性在很大程度上受到环境影响[2][3]。因此为了保证供电的安全性、稳定性、可靠性,需要对变电站进行定期的检修和维护,本文基于AGV平台设计了一种变电站室内检修机器人[4]。该机器人的设计重点在于运动控制、寻迹功能、避障功能的实现。经过仿真验证,机器人的功能完全满足设计要求[5][6]。本文的研究对于提升配电网系统工作能效,推动电力系统自动化和智能化具有重要意义[7]。
1 检修机器人虚拟样机
变电检修机器人采用四轮驱动结构,根据导航命令在变电站室内地面走行,辅助或替代人工完成作业工具的搭载[8][9]。其结构包括了驱动部分和运载部分两个主要环节,驱动部分由锂电池提供电能,锂电池实现化学能到电能的变换从而驱动直流电机转动,再通过传动机构驱动车轮转动,进而实现走行,锂电池组配置在机器人车体的内部前后两端;运载部分的顶端配置了工具放置区,用于存放被运送的工具[10]。机器人车体内部设计为上下两层,下层安装直流电机和车轮,上层安装控制系统,车体的前壁和后壁都配置了传感器,用于感应障碍物和地面导向线,同时感应充电设备的位置,车体的前后端都配置了控制面板,技术人员可以通过控制面板设定机器人的走行路线[11][12]。
2 检修机器人控制系统设计
2.1 控制系统总体架构
针对于变电检修机器人的核心使用需求,采用基于单片机为主控芯片的控制系统,在辅助添加自主寻迹和自主避障模块。变电检修机器人的动力部分,其小车在机械机构上采用的四轮驱动方式,驱动轮由四台直流电机提供动力,由单片机实现对直流电机的控制,这样就能够实现对变电检修机器人的控制。单片机由于驱动功率的限制无法直接对直流电机进行控制,因此需要通过专门的电机驱动芯片来对电机进行驱动控制,这样就是间接控制直流电机。检修机器人控制系统架构如图1所示。
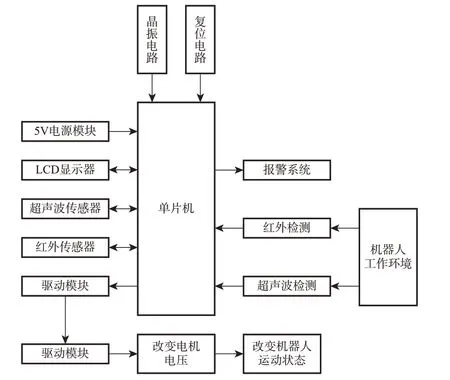
图1 检修机器人控制系统架构
如图1所示,其中的核心部件单片机采用51系列的单片机,该芯片运算速度快、外部设备丰富、功耗低,非常适用于直流电机的控制。其中晶振电路的作用是通过震荡产生脉冲信号,为单片机的工作提供时钟;复位电路用于给单片机提供复位信号,保证其能够重新启动,完成初始化重新开始工作;5V电源模块的作用是为单片机提供工作电源;LCD显示器的作用是能够实输出一些数据,显示检修机器人的工作状态;超声波传感器和红外传感器是用于对机器人工作环境中的障碍物进行检测,将障碍物的相关数据反馈给单片机,由单片机进行运算,以判断下一步需要进行的动作;由于直流电机本身的驱动功率较大,无法由单片机输出的信号直接来驱动,因此需要配置驱动芯片,由单片机向驱动芯片下发驱动信号,再由驱动芯片实现直流电机电压的调节,从而实现对直流电机的控制,间接实现了对检修机器人的控制。此外,还设置了报警功能,但变电检修机器人的工作出现异常时,会自主向外界发出报警信号,告知变电检修机器人处于故障状态。
2.2 寻迹功能实现
变电检修机器人寻迹功能的基本前提是能够正常走行,通过软件的相关设置,能够让变电检修机器人按照预先设定好的线路进行走行,为了实现寻迹功能,必须要采用红外光电传感器。通过对红外光电传感器的工作原理和工作特性进行深入研究,红外光电传感器能够很好的匹配本文的设计需求,能够很好的实现变电检修机器人的寻迹走行。
2.3 避障功能实现
检修机器人的避障功能是指当机器人走行方向上遇到障碍物的时候,能够自主对障碍物进行辨识,对障碍物的具体位置进行测算,并执行相应躲避动作。通过两种方法能够实现避障功能,一种是采用现有的红外光电传感器,另一种是采用超声波模块。
检修机器人进行避障的前提是需要对障碍物进行辨识,需要由检修机器人发出信号,信号遇到障碍物后会反射回来,这样检修机器人就能够接收到反射回来的信号来实现对检修机器人与障碍物之间的距离测量。再由单片机经过运算输出相应的控制信号完成避障动作。所以说避障的重点就在于检修机器人与障碍物之间距离的快速、准确测量。准确地测量能够保证检修机器人能够准确辨识障碍物的具体位置;由于检修机器人本身存在一定的行驶速度,单片机的运算以及控制信号的输出需要一定的时间,检修机器人收到避障指令后也需要经过一定的响应时间来变换运动状态。因此,测距模块也需要保证准确性和快速性的平衡。
为了实现检修机器人的自主避障功能,这里给出了运动数学模型,并推导了数学方程,其运动学方程如式(1)所示:
2.4 运动状态分析
当检修机器人处于不同的电力环境中时,其运动状态也会有所不同。由于电力环境强电场、强磁场耦合的复杂环境,检修机器人会结合检测到的障碍物以及其他外部干扰作出因素进行相关性相应,呈现出四种运行状态,即前进、停止、后退、转向。首先需要对检修机器人的运行状态进行辨识,再根据运用需求对不同状态下的机器人进行预设定。检修机器人的停止状态可以细分为两种,一是位于起始点和终到点的运动状态,其停止目的是装货和卸货;二是在走行过程中由于遇到障碍物不能够直接通过,需要先停止再进行转弯避障。
检修机器人的前进状态是正常行驶状态,通过速度反馈进行控制,设定有速度目标值,通过不断调节保证检修机器人的走行速度达到稳定状态。检修机器人的后退状态是指遇到障碍物时,与停止状态和转弯状态相配合完成避障动作。转弯状态是检修机器人最重要的状态,需要根据障碍物所处的状态进行分析从而进行不同方向的避障动作,在遇到障碍物时,检修机器人可以根据预设定的程序进行左转或右转,完成避障动作。
3 仿真测试
对本文所研究的变电检修机器人在实验室环境中进行测试,其预先设定的好的走行路线如图2所示,记录下全部的位置数据并显示出来,分析器运动控制程序的性能优劣。如图3所示为变电检修机器人的试验中的全部走行路线。如图4所示为变电检修机器人在试验中的局部实际走行路线图。
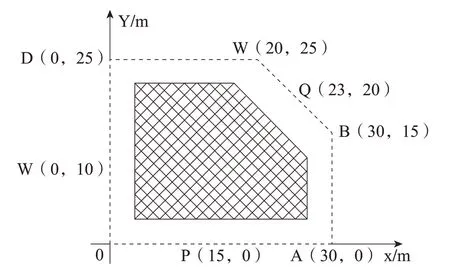
图2 变电检修机器人预定走行线路图
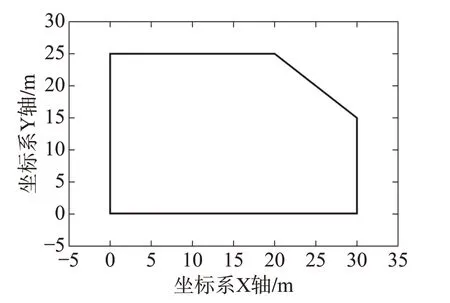
图3 变电检修机器人实测走行路线图
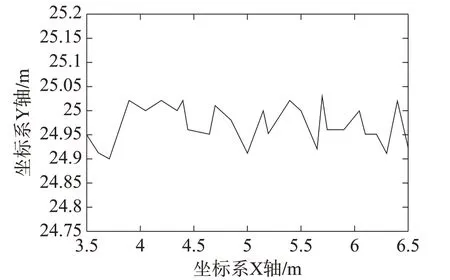
图4 变电检修机器人局部局部实际走行线路图
综上分析可知,该变电检修机器人能够准确地到达预先设定好的位置,并开展工作,其运动过程中的位置误差通常较小不超过2cm,角度误差也较小不超过0.05rаd,当变电检修机器人完成任务,即将离开作业并移动到下一个作业的时候,有时位置误差偶尔超过2cm且角度误差超过0.1rаd,这是由于变电检修机器人在加速或减速时,其自重引起的惯性因素所产生的影响。在所有的测试项目中,变电检修机器人没有碰撞任何障碍物或偏离设定的走行路线。结果表明,该变电检修机器人能够是满足不同场合的变电检修作业且满足实际工况需求。
4 结束语
随着国家大规模推进智能电网建设,与其相匹配的变电检修也需要紧跟着进行智能化推进,不断提升其检修水平和检修效率。本文专门设计了一种新型的变电检修机器人,从检修机器人虚拟样机、控制系统架构、检修机器人功能实现等几个方面展开了深入研究。经过实验室环境下的仿真功能验证,该变电检修机器人功能上完全满足设计要求,可以进行大规模的推广应用,具有一定的实用价值和经济价值。