基于无人机技术的输电线路智能地线管控方法
2024-05-07闫可飞阮利生张云飞
孙 伟 闫可飞 阮利生 付 磊 张云飞
(国网冀北张家口供电公司)
0 引言
输电线路智能地线管控是为了提升电力系统的安全性的研究。现阶段,传统的线路管理方法已经无法满足复杂电力网络的需求[1]。智能地线管控通过结合先进的信息技术和通信技术,实现对输电线路的实时监测、分析和控制,从而实现对线路状态的精确评估和监管。输电线路智能地线管控作为电力系统领域的重要研究方向,旨在通过应用先进的信息技术和通信技术,实现对输电线路状态的精确监测、分析和控制,以提升电力系统的安全性、可靠性和效率。这对于实现智能电网的发展和推广,以及满足未来电力需求的增长,具有重要的意义[2]。
传统的输电线路智能地线管控方法主要依赖人工巡检和监测设备。人工巡检需要专业人员沿线巡视,发现地线的故障或异常情况,并进行相应的维修和处理。这种方法存在人力资源和时间成本高、覆盖范围有限、容易忽略细微故障等问题[3-4]。
另一种常见的方法是使用监测设备,如传感器和监控摄像头等,进行地线的实时监测。这些设备可以收集地线的相关数据和影像信息,并传输到中心控制系统进行分析和处理。然而,这种方法受限于设备的可靠性和覆盖范围,而且数据的处理和分析也需要人工干预和判断,存在一定的误差和延迟。综上所述,传统方法在地线管控方面存在一些限制和不足之处,无法实现对输电线路地线的全面、精准的监测和管理。在此背景下,本研究采用基于无人机技术设计新的智能地线管控方法。
1 基于无人机技术的输电线路智能地线管控
1.1 基于无人机双目仿鹰眼视觉的兴趣区域提取方法
基于无人机双目仿鹰眼视觉的兴趣区域提取是一种利用无人机搭载双目摄像头,模拟鹰眼视觉系统的方法,对地面上的兴趣区域进行高效提取和识别[5]。该方法在不同的角度和距离同时获取地面景物的图像。通过对双目图像进行计算机视觉算法的处理,可以实现对地面上的兴趣区域进行精确提取。
无人机双目成像示意图如图1所示。
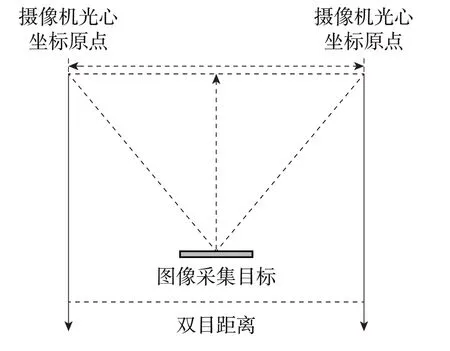
图1 无人机双目仿鹰眼视觉成像方法
仿鹰视觉是一种以中枢为中心、以边缘为中心的生物视觉系统,通过多个神经元层次的加工,将人们的注意力吸引到了中枢。因此,在这篇文章中,将的像素对比度设置为显著信息,像素对比度主要分为亮度、纹理以及颜色对比度。为了计算灰度反差,以每个像素作为中心,设置辉度反差操作窗。而相对灰度值则会对视觉刺激的状态产生很大的影响[6]。
相对灰度和像素点亮度对比度之间存在一定的关系。当图像具有高对比度时,不同灰度级别之间的差异更为明显,图像会显得更加清晰和鲜明。相反,如果对比度较低,图像中的灰度级别差异则相对较小,图像会呈现出更加平坦和模糊的效果。减少或压缩像素灰度值的差异会降低图像的对比度,使图像变得更加平滑。这种改变对比度的原理是通过调整像素的灰度值范围来实现的。通过拉伸或压缩原始图像中的灰度值分布,可以改变图像中不同灰度级别之间的差异程度,从而影响图像的对比度。
设置相对灰度值是G的像素点亮度对比度是G(x,y)。
式中,m表示各个运算窗口的像素数目;Gm表示像素点灰度值。
在光度路径上,每个像素之间的光度没有差别,只有色度和色度有差别。在鹰眼色彩空间中,任意一种色彩,都可以用3D的方式来描述。在该三维向量中,色调值可描述亮度值的变化,最大和最小值为-180°,180°;色彩向量的模值即为色彩饱和度,最大饱和度为1,原点饱和度为0。
不同像素点Q、W之间的颜色也存在不同,颜色对比度的差异是ℑ。
根据颜色对比度之间的差异性,提取兴趣区域V(x,y):
2.2 地线隐患特征提取
在对输电地线的管控中,提取地线行为特征的目的是为了实时监测地线的状态和性能,以便及时发现潜在的故障和异常情况。通过提取地线行为特征,可以对地线的电流、电压、接地阻抗等参数进行分析和监测,从而评估地线的工作状态是否正常,以及可能存在的问题。本文采用小波变换理论进行输电线路的地线地线行为特征的提取。针对输电线路的地线分布参数数学模型[7]。小波变换可以同时提供时间和频率信息,可以分析不同尺度的地线行为特征。在输电系统中,地线地面电流通常存在多个频率成分,通过小波变换可以将这些成分分离出来,实现对地线行为特征的准确分析。设定一个母小波H(t),经过两次伸缩与平移变换,得到模型的时域转换函数,可表示为:
式中,Δγ表示变化带宽。
将时域函数进行小波分解,构造地线模型在高维空间中的特征向量[8],即:
式中,g0表示分解系数;A和B分别表示分解后的两个不同地线节点;d表示信号长度。
2.3 基于深度残差网络的地线故障识别模型
把2.2小节中的地线模型在高维空间中的特征向导进深度残差网络,在残差模块的作用下,提取图像特征信息,步骤如下:
①将地线模型在高维空间中的特征向导进深度残差网络;
②地线模型转换:首先,将地线模型转换为对应的图像特征表示。这可以通过各种方法实现,例如将地线模型的参数作为图像的像素值,或者通过地线模型的输出结果构建特定的图像表示。
③应用深度残差网络,以实现对图像特征的提取。
④特征提取与传递:在深度残差网络中的每个残差模块中,利用地线模型的特征表示进行特征提取和传递。具体而言,可以将地线模型的特征与输入图像的特征进行融合或拼接。
⑤残差学习与更新:在每个残差模块中,除了进行特征提取外,还可以引入残差学习机制。残差学习通过跳跃连接将输入特征与输出特征相加,使网络能够更好地学习和表示图像中的重要特征。
⑥结合其他网络层:除了残差模块外,深度残差网络还可以包括其他常见的网络层,如池化层、全连接层等,以进一步提取和表达图像的特征。
⑦把获取的图像信息以全局平均池化的方式,把特征压缩变成一维向量。然后通过Softmax分类器,以二分类的方式,识别G′是否属于地线故障类图像。
提取出的输电线路图像特征信息表示为G′,导入全局平均池化层中压缩后,使用Softmаx分类器识别地线故障:
式中,η是Softmаx分类器的参数。
3 实验论证分析
为了验证基于无人机技术的输电线路智能地线管控方法的有效性,设计如下实验。首先,选择具有一定长度和复杂地形的现场输电线路作为实验对象。在实验开始前,建立一个完整的地线行为模型,并利用数据采集设备对地线行为特征进行测量和记录。其次,使用无人机技术进行实际地线管控实验。无人机搭载相机、热像仪、雷达等多种传感器,用于获取地线的图像、热点分布和障碍物检测等数据。此外,还可以利用激光雷达和惯性导航系统等设备获取地线的三维坐标信息。在实验过程中,无人机会按照预设的路径沿着输电线路飞行,同时将获取到的数据实时传输到地面处理站。通过分析数据,可以实时监测地线的状态、温度、接地阻抗等指标,并及时发现可能存在的故障或异常情况。监测范围为以架空地线为中心,半径5.0 km的环形区域。相机的摄影技术参数如表1所示。

表1 可见相机技术参数
基于以上相机装置,实验共采集到了5000张存在地线隐患行为的实时样本图像,由此构建地线地线图像数据集。
通过损失函数可以测试出研究方法提取的图像兴趣区域的失真情况,是因为损失函数可以用来衡量生成图像与目标图像之间的差异或相似度。在图像处理任务中,通常会定义一个损失函数,用于比较生成的结果与真实目标的差异程度。对于提取图像兴趣区域的任务,我们可以将生成的兴趣区域图像作为生成图像,将真实的兴趣区域图像作为目标图像。当提取的图像兴趣区域与目标图像高度一致时,其损失值会较低,表示提取的结果准确无失真。而当提取的图像兴趣区域与目标图像存在明显差异时,损失值会较高,表示提取的结果存在失真。设置损失函数为μ,测试结果如图2所示。
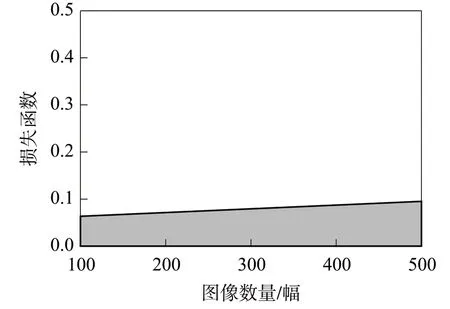
图2 损失函数μ测试结果
如图2所示,本文方法应用后,地线图像的兴趣区域失真度更小。
将输电线路超分辨率图像作为样本输入到地线故障识别模型中,在使用此模型识别地线故障时,先使用已知地线故障图像作为训练样本进行训练,训练时的平均精度与训练迭代次数之间变化如图3所示。
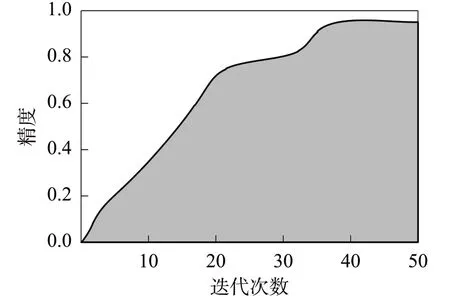
图3 训练时的平均准确率与训练迭代次数之间变化
如图3所示,训练过程中,迭代78次时,本文方法对已知地线故障图像识别结果的平均精度值已经超过0.95,为此,本文方法在识别图4地线故障时,将基于深度残差网络的地线故障识别模型的迭代次数设成78。在此前提下,
为进一步测试本文方法在输电线路的地线隐患监测方面的优越性,采用文献[3]方法和文献[4]方法与本文方法进行对比,将三种方法得到的地线地线隐患定位坐标与真实坐标进行比较,并对比不同方法的定位精度,结果如表2所示。
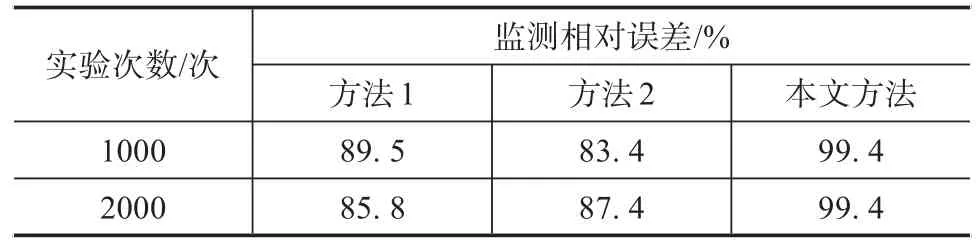
表2 地线监测误差结果对比
分析表2中数据可知,所提方法对输电地线的监测具有更高的精度,且数值水平始终保持在97%以上。
4 结束语
本研究提出了一种基于无人机技术的输电线路智能地线管控方法,通过利用无人机双目仿鹰眼视觉技术提取输电地线的兴趣区域,并结合小波变换分析地线的故障隐患特征,运用深度残差网络完成输电线路智能地线故障的诊断和管控。无人机技术的应用也可以减少人力投入和风险,提高工作效率和安全性。