基于双目视觉的智能变电站检修区域全天候在线监测方法
2024-05-07董泽强
王 楠 郑 磊 邹 胤 董泽强 廖 海
(贵州电网有限责任公司遵义供电局)
0 引言
智能变电站对电力系统的稳定性和安全性至关重要,而检修工作是确保其稳定运行的重要环节。然而,传统的检修方式有限,无法实现全天候的在线监测。因此,基于双目视觉技术的智能变电站检修区域全天候在线监测方法备受关注。双目视觉是一种利用两个摄像头同时获取图像并通过计算机算法进行分析的技术。在智能变电站中,检修区域的全天候在线监测具有重要意义。传统上,变电站的检修通常需要人工巡检和定期维护,这对于确保设备的正常运行非常关键。然而,人工巡检存在时间成本高、效率低以及无法实现全天候实时监测等问题。因此,利用双目视觉技术来实现智能变电站检修区域的全天候在线监测具有很大的优势和意义。
近年来,有学者对智能变电站检修区域全天候在线监测方法进行了研究。例如,文献[1]提出了基于实时分布式计算平台的智能变电站设备在线监测研究,而文献[2]则提出了智能变电站隔离开关机械状态自动监测方法。然而,这些方法存在监测准确率低的问题。
为解决这一问题,本文提出了一种基于双目视觉的智能变电站检修区域全天候在线监测方法。该方法利用双目视觉技术实现对检修区域的实时监测和故障诊断。通过该方法,可以有效地提高智能变电站的检修效率和故障诊断准确性。
1 智能变电站检修区域全天候在线监测方法设计
1.1 双目相机测距原理
双目相机由两个摄像头组成,它们同时拍摄同一场景,形成两张2D图像。当同一个物体同时出现在左右两张图像中时,由于摄像头之间的基线距离,它在两个图像中的位置会有所偏移,这种偏移量称为视差。视差可以通过计算两张图像中对应像素点的距离差来得到。通过视差,可以得到同一物体在两张图像中对应像素点的距离差,同时已知两个摄像头的基线距离和视角等参数[3]。因此,双目相机可以通过测量视差和已知的基线距离和视角参数来测量物体的距离,具体如图1所示。
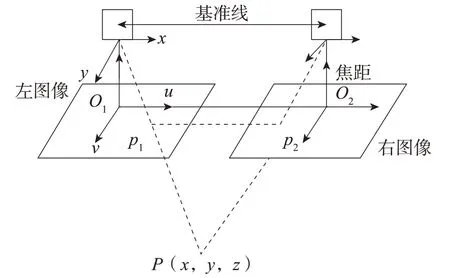
图1 双目相机测距原理
1.2 智能变电站检修区域图像采集
智能变电站检修区域图像采集是实现全天候在线监测的重要步骤之一。为了确保采集的图像清晰、稳定且具有代表性,通常需要使用高分辨率、高灵敏度的相机进行拍摄。在智能变电站中,由于存在大量的电磁干扰和信号干扰,相机的选择也需要考虑到这些因素。在图像采集过程中,相机的设置和调整也是非常重要的。通常需要调整相机的曝光时间、光圈大小、ⅠSO感光度等参数,以确保拍摄的画面质量符合要求。相机参数如表1所示。
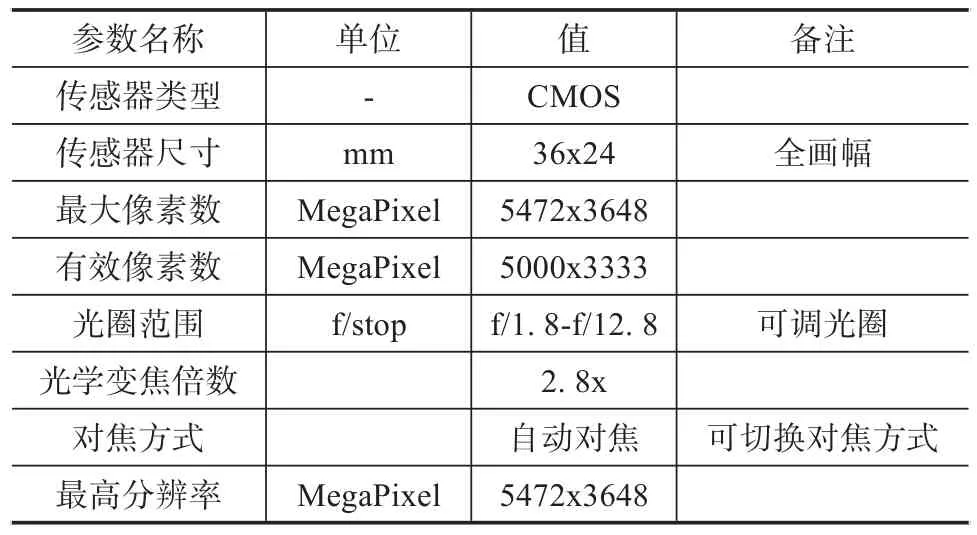
表1 相机参数
在智能变电站检修区域中,由于环境和光照条件比较复杂,需要采用多种不同的光源和照射角度来保证图像的质量和稳定性。在拍摄过程中,通常需要使用闪光灯进行补光,同时需要根据不同的环境和光照条件调整光源的位置和角度。此外,为了确保拍摄的画面清晰稳定,还需要使用三脚架或其他固定设备来固定相机和灯光的位置。其采集环境如图2所示。

图2 智能变电站检修区域图像采集环境

图3 实验现场图
1.3 智能变电站检修区域图像预处理
智能变电站检修区域图像预处理是图像分析的重要环节,旨在消除噪声和改善图像质量,以便更准确地提取特征信息。在灰度化过程中,可以使用以下公式对彩色图像进行转换:
式中,g(i,j)表示灰度图像中像素点(i,j)处的灰度值,r(i,j)、g(i,j)、b(i,j)分别表示彩色图像中像素点(i,j)处的红、绿、蓝三个通道的像素值。
中值滤波可以通过以下公式实现:
式中,N表示经过滤波后的新像素;(Q1,Q2,...,Qn)表示为经过滤波像素点集合。
综上所述,智能变电站检修区域图像采集是实现全天候在线监测的重要环节之一。通过对图像的采集和处理,可以实现对检修区域的故障诊断和状态监测,为电力设备的稳定运行提供有力的保障。
1.4 智能变电站检修区域危险事件特征提取
智能变电站检修区域危险事件特征提取是实现故障诊断和状态监测的关键环节之一。通过对图像和视频数据的分析,可以提取出危险事件的特征,从而判断出是否存在安全隐患。边缘是图像中像素值发生显著变化的位置,通过边缘检测来判断智能变电站检修区域图像中的变化,可以通过以下公式实现:
式中,f(i,j)表示变化后的像素值,g(i,j)表示原始图像中像素点(i,j)处的灰度值,g(i,j)-g(i-1,j)表示相邻像素点的灰度值。
设S表示图像中的像素点集合,S={(r1,g1,b1),(r2,g2,b2),…,(rn,gn,bn)},(rn,gn,bn)表示像素点n处的RGB值。通过计算像素点集合中各像素点之间的距离、角度、梯度等信息,可以提取出已经出现变化的图像中存在的纹理特征,相当于智能变电站检修区域图像中出现的危险事件的特征。其中,变化前后图像像素点之间的距离可以由欧几里得距离公式计算:
式中,(x1,y1)和(x2,y2)是两个像素点的坐标。
变化前后图像像素点之间的角度可以由两个像素点之间的向量夹角计算:
式中,аrctаn表示反正切函数。
变化前后图像像素点之间的梯度可以由灰度值差分计算:
式中,g(x1,y1))和g(x2,y2)是两个像素点的灰度值。
由此对智能变电站检修区域危险事件特征进行提取,计算公式如下:
通过以上特征提取方法,可以提取出智能变电站检修区域危险事件的特征,为故障诊断和状态监测提供更准确的数据支持。
1.5 基于双目视觉的全天候在线监测
将已经提取的智能变电站检修区域危险事件特征作为输入样本,输入用于图像分类的卷积神经网络模型中,将w(l-)1j作为卷积神经网络中第l-1层中第j个危险事件特征图经过卷积后输出的像素矩阵,结合损失函数loss ,进行变电站检修区域危险事件分类,实现智能变电站检修区域全天候在线监测,计算公式如下:
式中,δ表示模型输出结果,即监测出的变电站检修区域危险事件;J表示卷积层;t表示危险事件持续时间;C表示池化层;b表示卷积核;q表示偏置加权;α表示学习参数。
至此,完成基于双目视觉实现智能变电站检修区域全天候在线监测方法的设计,可实现变电站检修区域危险事件的在线监控,提高智能变电站运行的可靠性和安全性。
2 实验
2.1 实验环境
文章选取某智能变电站作为研究对象,分别采用本文方法,文献[1]、[2]方法进行智能变电站检修区域全天候在线监测。其具体的实验现场图如3所示。
2.2 实验结果分析
在上述实验环境下,为了验证本文方法的高效性,以检测时间作为指标,分别采用文献[1]、[2]方法进行监测,对比三种方法的监测效率。具体对比结果如表2所示。

表2 三种方法的监测效率的对比结果
分析表2可知,本文方法用于智能变电站检修区域监测的时间最高只需40ms,而其他两种方法所需的时间最低分别为310ms和325ms。这表明本文方法在提智能变电站检修区域监测效率方面具有显著优势。通过减少监测时间,可以更快地发现和应对潜在的故障,从而降低了智能变电站检修的安全风险。
为验证本文方法的可靠性,研究对智能变电站检修区域进行监测,并与文献中的方法进行对比。具体比较结果见图4。
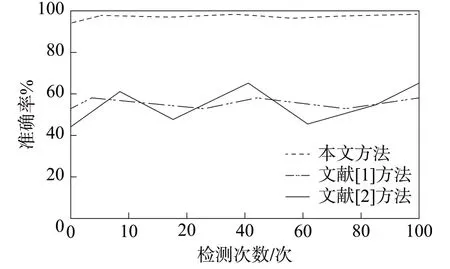
图4 三种方法的电力设备状态监测准确率对比结果
经过对图4的分析,可以观察到本文方法在智能变电站检修区域监测中具有显著优势。发现,本文方法的监测准确率始终保持在95%以上的高水平,而其他两种方法的准确率都低于70%。这表明本文方法在检测目标物时具有较低的误报风险,能够更准确地识别出变电站检修区域中的异常情况。高准确率是评估监测方法可靠性的重要指标之一。本文方法在监测准确率方面表现出色,说明它能够提供可靠且准确的监测结果,有助于及时发现并处理潜在的故障和问题。这将对变电站的运行安全性和可靠性产生积极的影响。
3 结束语
本研究基于双目视觉技术提出了一种智能变电站检修区域全天候在线监测方法。通过使用双目摄像头获取的图像数据,并利用图像处理和计算机视觉算法进行分析,能够实时监测变电站的检修区域。通过提取和分析图像中的设备状态。实验结果表明,该方法能够高效准确地监测智能变电站检修区域中发生的危险事件。通过实施该方法,能够加强变电站的运行安全性和可靠性,减少潜在的故障风险,并提升整个电力系统的运行效率。在未来的工作中,将进一步改进和优化该方法,提高监测的准确性和响应速度。同时,还将探索更多的技术手段,如人工智能和大数据分析,以进一步提升智能变电站的监测能力和管理水平。