变电站智能巡检机器人在南钢220kV六总降的应用
2024-05-07高满香
高满香
(南京钢铁产业发展有限公司能动事业部)
0 引言
变配电设备是钢铁冶金企业最重要的资产之一,其运维管理一方面肩负着冶金企业用户电能使用的保障任务,另一方面也是钢铁冶金企业用户节能降耗,响应“双碳”目标的助攻手角色。在变配电设备运维过程中,钢铁冶金企业用户深受设备老化或管理不善所导致的开关跳闸、短路、设备火灾等的影响,而造成重大经济损失。因此,探索智能巡检机器人在钢铁冶金企业的应用具有重要意义。
1 智能机器人巡检系统概述
1.1 智能机器人巡检技术
智能机器人巡检技术是通过应用红外热成像和高清视频双视结合技术、局放在线监测等技术,实现对柜体关键部位的自动目标定位、状态监测、温度监测、局放监测,及时发现设备缺陷,提高巡视效率,真正实现机器人在多种复杂环境中的智能巡检[1]。
1.2 智能机器人巡检基本架构
主辅一体化系统是一套集电力主控监控和智能辅助监控为一体的一体化系统。主辅一体化系统将各个系统按照统一数据模型进行汇聚,形成真正的生产管理平台,实现钢铁冶金企业的高效、现代化管理。
通过在主辅一体化系统中接入智能机器人巡检系统,实现对智能巡检机器人的一体化管理,提高运维效率。运维人员可通过一体化平台实现对智能巡检机器人的基本信息管理、巡检任务下发、巡检报表的查看下载、手动操控巡检机器人等。智能巡检机器人的基本架构如图1所示。
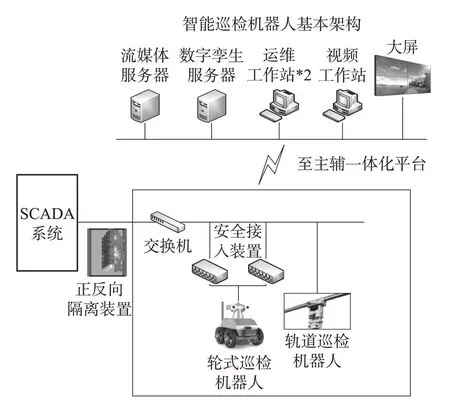
图1 智能巡检机器人基本架构

图2 六总降智能巡检机器人“双确认”流程图
2 智能巡检机器人在南钢220kV六总降的应用
2.1 南钢六总降主辅一体化平台
为适应南钢在“十四五”期间提质增效计划,优化南钢整体的负荷分布情况,提升南钢电力系统整体供电可靠性,于2022年1月至2023年6月建设投产了南钢六总降。南钢六总降的主辅一体化平台是参照《智能变电站远测智能巡视系统技术规范(实行版)》和《国网基建2022-3号文:附件1:35~750kV变电站辅助设备智能监控系统设计方案》的要求设计的新一代黑灯工场,新型智慧冶金企业变电站。
南钢六总降主辅一体化平台负责完成10个总降变的信息的数据采集功能、SCADA功能,电网分析功能(网络建模、网络拓扑、状态估计、潮流计算、负荷预报、短路电流计算、静态安全分析等),安全WEB数据整合发布功能,实现对供配电系统一次、二次设备以及第三方设备的监测、记录、控制,实现整个供配电系统主辅设备运行的监控、管理功能[2]。
2.2 智能巡检机器人系统
2.2.1 南钢六总降巡检机器人概况
六总降主辅一体化平台智能巡检子系统在220kV和110kV GⅠS室内分别配置了2台智能巡检机器人,10kV高压开关柜室内配置一台操作巡检机器人,实现对辖区内各变电站的主辅设备全面监视控制、智能声光告警、主辅设备的高效联动、在线智能巡检综合数据分析、能耗智能管控等功能,打造南钢智慧供电。
2.2.2 南钢六总降巡检机器人运行模式
目前在两个GⅠS室内应用轮式智能巡检机器人。在感知层以智能巡检机器人作为数据感知终端,完成对底层设备的巡检工作,获取巡检数据。通过红外测温、视觉识别、环境监控、噪音提取、SF6/O2监测、运行环境等多种功能,有效辅助人工对复杂设备进行全面的巡检,实时监测设备运行状态[3]。
在网络层通过多个无线AP的建设搭建属于机器人的无线局域网,满足南钢供电网络安全管理要求。在站控层搭建基于感知层的数据进行存储、分析、业务展示。站控系统支持一站多机运维模式,一台标准的站控服务器可以支持四台标准的轮式升降巡检机器人正常的运行作业。
在数据接口方面,机器人除了实现与机器人工控后台进行双向信息交互外,还实现了与六降一体化平台等系统进行双向信息交互,信息交互内容包括检测数据和机器人本体状态数据。
2.2.3 智能巡检机器人巡检路线
为使智能巡检机器人能够以最快速度到达指定的巡检点位,需要确定智能巡检机器人巡检的最优路径,以提高巡检效率。巡检路线的确定通过雷达采集变电站内关键巡检点特征为基础,在结合考虑巡检类型、设备类型、设备位置等信息来进行综合规划机器人巡检路线。智能巡检机器人通过各类传感器来判断机器人四周的障碍物,可以根据当前的实际路线的通畅来及时调整巡检路径。
2.2.4 南钢六总降主辅一体化系统与巡检机器人接口对接
为保证主辅一体化系统具有较强的易用性、可扩展性,智能巡检机器人系统统一采用HTTP接口,数据请求和响应返回均采用json格式封装的字符串,编码统一为UTF-8,采用gеt/рost方式提交请求。
接口内容包共包含三大类:机器人类接口(主要用于获取机器人基本信息)、机器人控制类接口(主要用于对智能巡检机器人进行任务控制、手动控制等)、机器人任务类接口(主要用于下发智能巡检机器人巡检任务、获取巡检结果等)。

表1 获取机器人基本信息接口内容
2.2.5 南钢六总降巡检机器人识别结果的“双确认”
智能巡检机器人在巡检识别中,总是无法避免的出现误判的情况,需要人工进行二次判断。为了进一步减轻运维人员对智能巡检机器人巡检告警的判断分析,将SCADA系统实时数据通过防火墙采用ⅠEC104规约上传至智能巡检机器人,将智能巡检机器人的识别结果与SCADA系统实时数据进行对比,实现“双确认”,当巡检结果与SCADA数据不一致时,生成巡检告警信息,交由现场运维人员进行综合判断设备运行情况[4]。通过“双确认”步骤,大大提高了运维人员的工作效率,降低了设备故障率。
2.2.6 南钢六总降巡检机器人运行效果
自今年7月份以来,经过连续三个月的机器人调试、扫图、添加巡检路径点、配置巡检规则、开发巡检接口等工作,目前六总降智能巡检机器人几乎可以完全实现站智能远程巡视代替原有的人工每日点检。且已完成了在六降一体化平台自动下发巡检任务、自动形成巡检报告、实施读取机器人状态、完成主辅系统联动、数字孪生三维视角全景展示等功能。
从表2中可以看出,类似于检查螺栓和螺帽的紧固、支撑件及外在部件、接触器破裂生锈变色这样未配置或者没有传感支撑的设备情况无法巡检到,其余的都具备自动巡检能力。且由于机器人本身具备多种灵活巡检能力,通过搭载更智能的AⅠ传感设备完全可以实现比人力巡检更加智能、可靠、安全的巡检目标。对变电站内各项运行数据站内实时、非实时运行数据、辅助应用信息、各种报警及事故信号进行检测核实实时数据准确性。
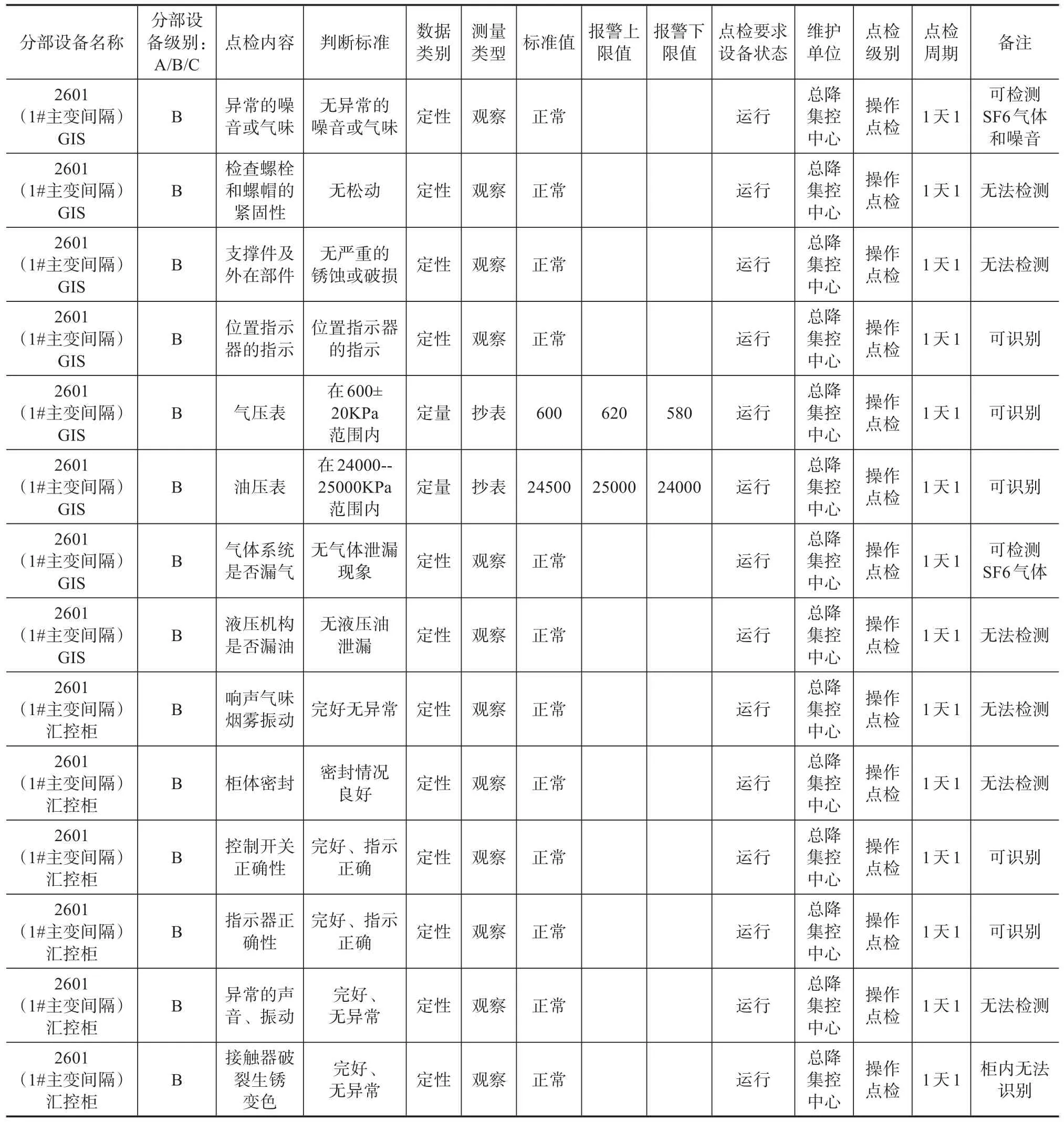
表2 巡检机器人自动巡检点位部分表格
3 结束语
变电站智能巡检机器人技术对变电站智慧运维的发展起着极大的促进作用,通过变电站智能巡检机器人技术可大幅提高变电站运维人员的工作效率、降低设备故障率、提高企业经济效益。针对变电站中无法巡检的螺栓紧固程度等问题,可作为智能巡检机器人后期研究内容。钢铁冶金企业可主动探索引进智能巡检机器人技术,提高变电站运维人员工作效率、降低设备故障率,进而提高企业经济效益。