基于改进卷积神经网络的电力工程数字化校核技术研究
2024-05-06周云浩韩志超
周 鑫,周云浩,王 楠,李 昊,韩志超
(国网北京市电力公司电力建设工程咨询分公司,北京 100021)
施工质量与设备验收是电网工程建设过程中的重要环节,随着工程规模的不断扩大,设备数量也随之增多[1-3]。传统的验收方式为人工作业,不仅费时费力,若电网架设在恶劣环境中,验收质量也无法得到保证。因此,自动化的电力工程验收技术受到越来越多的关注。与人工验收对比,自动化验收方案可以对无人机、机器人和人工智能算法等进行整合,通过机器采集电力工程的图像,再使用人工智能算法对图像加以分析。
在自动化验收技术中,最重要的技术就是对输电线、绝缘子及电力塔等电网关键部件的识别。然而,由于前端设备的图像采集能力参差不齐,部分小部件、相似部件的识别准确率较低。同时无人机进行图像采集时,也会拍摄到电网所处的环境,导致输电线路识别时受到背景干扰而出现部件漏检的情况。因此,文中基于无人机采集的图像提出了一种小部件与输电线的准确提取识别技术,能够高效地自动完成电力工程验收任务。
1 电力工程数字化校核算法设计
1.1 Faster R-CNN算法
卷积神经网络(Convolutional Neural Networks,CNN)[4-6]是一种以神经元为基础结构的智能数据训练算法,模型结构如图1 所示,其主要由卷积层、池化层及全连接层组成。其中,卷积层负责提取数据的特征;池化层实现数据特征的映射,并对重要数据特征进行聚类;最后通过全连接层对特征信息加权,进而完成分类工作。

图1 卷积神经网络结构
随着对图像检测质量需求的不断提升,检测准确性较低的单个CNN 结构已无法满足要求。因此,文中需要对卷积网络进行组合,而Faster R-CNN 算法[7-9]就是常用组合网络中的一种。算法结构如图2所示。

图2 Faster R-CNN算法结构
该算法结构由特征提取网络、区域候选网络以及检测网络组成。
1)特征提取网络负责对输入图像进行训练,主要操作流程包括卷积与池化。输入数据经过该网络可以生成对应的特征图,即算法对输入图像进行了一次特征提取,速度较快。
2)区域候选网络的主要作用是生成新的目标候选框,进而对目标进行标定。该网络本质上是一个二分类器,首先在特征图中生成固定大小的区域,通过Softmax 分类器对区域进行对比,并对网络加以训练,然后得到更为准确的目标标定位置。网络结构如图3 所示。
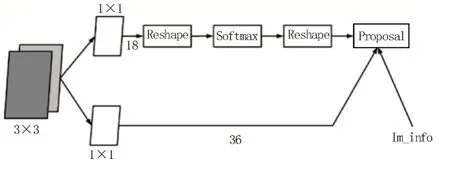
图3 区域候选网络结构
3)检测网络用于对区域候选网络的输出数据进行训练并分类。同时利用回归网络对分类完成的位置进行修正,最终获得目标的位置。
1.2 基于ResNet的特征提取网络改进
文中设计的Faster R-CNN 算法特征提取网络所采用的卷积网络模型为VGG16,该模型使用广泛,且具有良好的训练准确度及效率。但在检测电力工程设备时,经常会出现绝缘子等小体积的物体,而VGG16 模型具有全局特征,对小物体识别的准确度偏低。因此,文中引入残差网络(Residual Network,ResNet)以增加VGG16 原始网络的深度,进而提升算法对小型物体识别的准确度。
残差网络[10-12]的基本组成结构为残差单元,文中将其放置在正常网络的前馈通道中,等同于在输入网络及深层次网络中加入了级联通道。残差单元的结构如图4 所示。
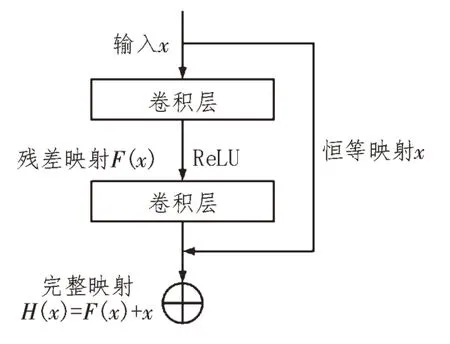
图4 残差单元结构
为了提升算法的局部特征感知能力,设计使用了多尺度残差网络代替原有网络组合。基于残差网络组成的新特征提取网络结构参数如表1所示。

表1 残差网络提取结构
1.3 基于改进K-means的区域候选网络
Faster R-CNN 的区域候选网络中的原始目标候选框是固定的,因此其自适应程度较差,会导致目标候选框的重叠面积也较大,从而引发模型收敛速度下降的问题。针对这一问题,文中使用K-means 聚类算法[13]对区域候选网络进行改进,从输入数据集合中随机选择数据点作为聚类中心c1,并计算该聚类中心与其他数据点的距离;第一轮计算完成后随机选择新的聚类中心c2,再继续进行分簇;直至所有数据均分类完毕后,算法停止。聚类算法流程如图5所示。
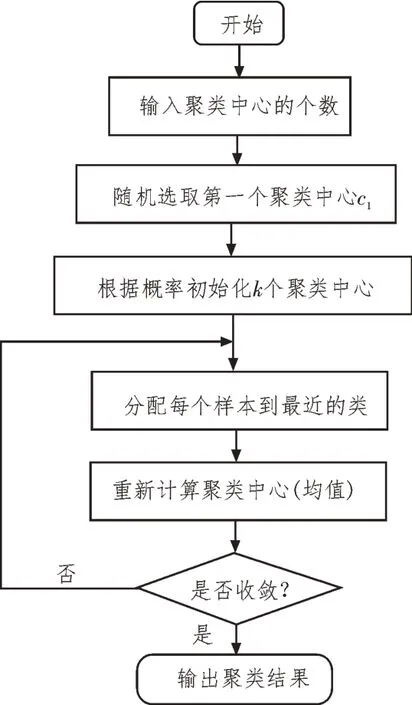
图5 聚类算法执行流程
改进后的区域候选网络执行过程如下:
1)根据输入数据集中的目标进行选定,并将标签存储至对应文件中。
2)对不同尺寸大小的目标物特征数据进行提取,且将该数据作为K-means 聚类算法的输入。同时根据特征数据集合的情况设置聚类中心的数量,之后再进行聚类运算。
3)得到聚类数据后生成目标候选框。
1.4 基于深度自编码器的检测网络
为了进一步提高模型的预测精度,使用深度自编码器(Deep Auto-encoder,DAE)对预测网络进行改进。自编码器是一种映射性的神经网络,而深度自编码器[14-16]加入了隐藏层网络,并通过该层学习数据间的隐含特征。DAE 的网络结构如图6 所示。
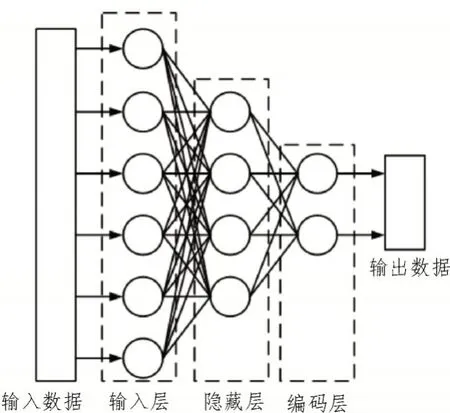
图6 深度自编码器的网络结构
该网络由输入层、隐藏层与编码层组成,其中输入层的主要作用是线性映射,并对固定位置进行编码。首先从区域候选网络输出层得到目标选择框,提取选择框参数(ai,bi,wi,hi),同时将目标的种类和区域信息内嵌至输入层的输入向量中,则有:
式中,xi为输入向量,xclass为x的映射值,表示线性的映射关系,Epos表示位置信息。
编码器的结构如图7 所示,其共有L层,且每层均包含注意力机制和全连接层两个连接层模块。
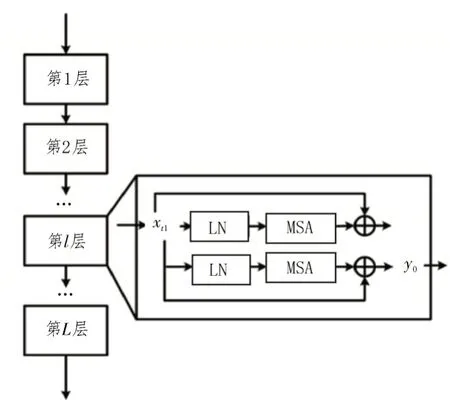
图7 编码器结构
编码器的输入与输出可表示为:
式中,A表示归一化数据层,xi1是编码器的输入,yo表示编码器的输出,Att 为注意力机制激活函数,xl-1则表示第l-1 层注意力模块的输出。
1.5 算法模型的总体设计
文中基于无人机平台采集到的扫描图像提出了一种电力工程数字化校核算法,该算法以Faster RCNN 为基础模型对网络的三个主要部分进行了改进。针对基础网络部分局部特征抓取不足的问题,使用多层残差网络加深了网络的层数;再采用Kmeans 算法对目标种类进行聚类来改善区域候选网络精度较低的情况,以得到准确的图像候选框;最后为了进一步提高预测网络的精度,利用深度自编码器对数据特征进行区域映射。所设计算法模型的总体结构如图8 所示。

图8 算法模型结构
2 实验与分析
2.1 实验环境
实验数据集使用标准数据集VOC2010 以及无人机采集的图像,并利用相关三维建模技术对电力工程的线路、杆塔、绝缘子、环境等进行建模。从数据集中采集了约5 000 张图像,无人机采集图像则作为训练和验证集合,用来验证算法在实际复杂场景下的识别能力。同时,实验硬件配置CPU 选择Intel Core i9-9900K,内存为128 GB,显卡使用NVIDIA GTX 1080ti,GPU 加速计算版本为CUDA10.0。软件选择深度框架TensorFlow,编程语言为Python3.6,操作系统为Ubuntu 16.02。
2.2 算法测试
首先对运算性能进行综合评估,使用VOC2010标准数据集验证算法的性能,评价指标选择了准确度、召回率以及浮点计算量。此外还使用多种对比算法来衡量所提算法的性能,消融内部算法使用CNN 及Faster R-CNN,外部算法采用YOLO-V3、ResNet以及DenseNet。实验测试结果如表2 所示。
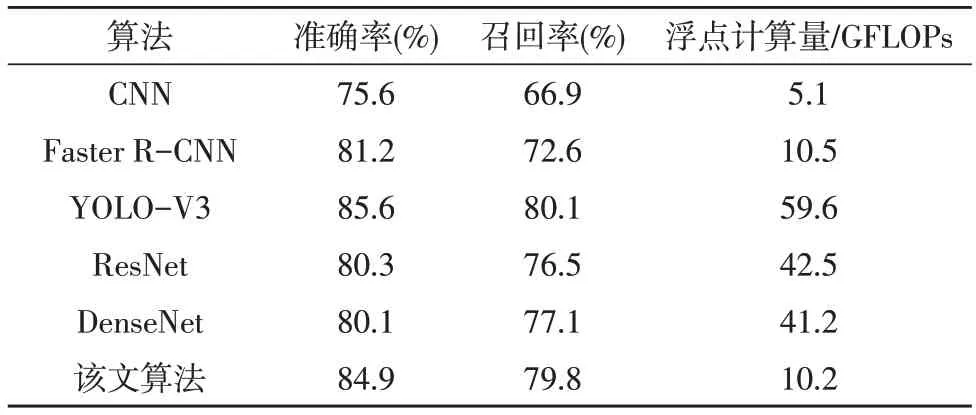
表2 性能测试结果
从表中可以看出,与原始Faster R-CNN 算法相比,该文算法的准确度、召回率分别提升了3.7%和7.2%,同时由于使用了残差网络,模型的浮点计算量也在减少。虽然相比于YOLO-V3,所提算法的准确率和召回率均略低,但YOLO-V3 模型的浮点计算量约为60 GFLOPs,而文中浮点计算量仅为10.2 GFLOPs,这表明该文算法的检测速度较优。
对具有不同关键部件的无人机采集图像进行部件识别,识别结果如图9 所示。

图9 关键部件识别结果
由图可知,该文算法可以对电力工程中的关键部位进行识别,并使用不同线型的框选中目标。这表明该文算法能够通过图像识别对电力工程中的关键部件进行识别,进而完成验收任务,既节约了时间及人力成本,又提升了效率。
3 结束语
文中针对人工验收电力工程设备费时费力的问题,基于无人机采集到的图像,提出了一种数字化验收校核技术方案。算法对Faster R-CNN 进行了改进,并引入了ResNet 多尺度卷积网络;再将原算法区域选择网络和K-means 聚类算法相结合,以增强模型的选择能力;最后使用深度自编码器对数据特征进行区域映射,进而提升了算法的综合性能。实验结果表明,该文算法性能较原始算法在准确率及召回率上均有所提升。同时其还能对电力工程中的部件进行准确识别,提高了电力工程的验收效率。
