基于BP 神经网络的飞行员着舰训练品质评估
2024-05-06张海燕闫文君张立民李忠超
张海燕,闫文君,张立民,李忠超
(1.海军航空大学,山东 烟台 264001;2.中国人民解放军31627 部队,广东 深圳 518000;3.中国人民解放军73022 部队,广东 惠州 516000)
舰载战斗机作为海上制胜的攻坚力量,在远洋作战中占有重要地位。舰载机飞行员掌握及运用专业技能的精通度,对舰载机战斗力起到决定作用[1]。随着舰载机着舰评估研究的深入,在模糊评价法[2]、主客观权重法[3]、多属性决策法[4]和相似构型决策[5]等方面都有了一些研究。然而,如何对舰载机飞行员着舰品质做出客观、准确、可量化的评价,仍然是一个挑战。
随着神经网络的发展,网络评估在民用航空领域受到了广泛关注。文献[6]利用反向传播神经网络与实际飞行数据相结合的方法,对民航航段的安全风险进行了评估并通过Matlab 编程验证了该方法的可用性,并且基于此方法建立了航段安全风险评估原型系统。文献[7]为实现客观评价,利用眼动数据,建立了网络层次为6×14×3 的BP 神经网络,对三位技术水平不同的飞行员的飞行绩效进行预测和评估;文献[8]针对试飞员的驾驶技术进行评估的,首先构建了评估指标体系,而后通过BP 神经网络对指标进行训练得到最优评估模型,最后通过Matlab 仿真验证了该方法的准确性。文献[9]将BP 神经网络运用到高原复杂机场终端区飞行中,构建了具有良好评估功能的飞行绩效评估模型。文献[10]为评估民用航空飞行中的风险,构建了BP 神经网络风险预测模型,通过算例分析验证了该模型的有效性。
从上述研究可知,基于神经网络的评估方法具有较强的准确性和有效性[11-13]。但就着舰评估而言,相关研究主要基于人工评估和传统算法[3-5],很少尝试神经网络。针对这方面的不足,将BP 神经网络运用到对飞行员的着舰训练中,利用飞行参数、挂锁情况以及专家组评分作为网络的输入和输出构建出数据集,通过对神经网络的训练、测试,验证了该神经网络评估模型的可用性。
1 构建数据集
作为一个机器学习问题,数据集的构建成为着舰训练品质评估的关键前提。构建了一个由300 条数据组成的着舰数据集,以合理的方式对数据集进行预处理和归一化处理,并采用适当的评估指标来评估所提出方法的性能。
1.1 数据来源
使用DCS 软件、F/A-18 飞机进行模拟着舰训练[14],飞行参数的存储频率设为80 Hz,通过TacView软件将飞行参数导出,以合理的方式提取特征飞行参数构建出数据集,用于网络的训练。
数据集作为网络评估的基准,收集了来自不同水平飞行员的有效着舰数据300 条,在相同分布的前提下,按照6∶2∶2 的比例分为训练集、验证集和测试集。测试集包含训练集和验证集中从未出现过的着舰参数,通过对验证集中着舰参数的评估预测能够真实反映BP 神经网络评估方法的性能。
1.2 特征提取
首先,综合考虑着舰模拟训练阶段特征,提取了五个特征点作为着舰评估关键点。从图1 着舰阶段划分示意图中可以看出,理想的着舰轨迹相对于航母甲板为一条直线,并且着舰过程是以相对于航母甲板等速、等角直线下滑的方式进行的[15]。参考大量的文献,该文中选取着舰开始点(KK)、着舰中间点(ZJ)、着舰接近点(JJ)、着舰进入点(JR)和复飞决定点(FF)五个特征点作为着舰评估关键点[2,15-16]。
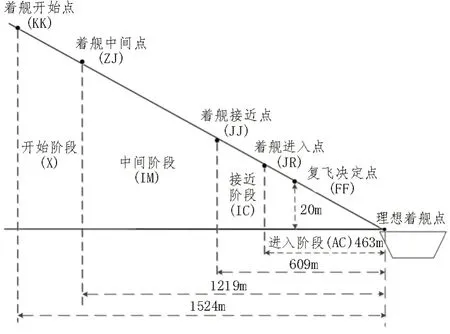
图1 着舰阶段划分示意图
其次,针对提取的五个特征点选取八个飞行参数作为着舰评估关键点的特征参数。飞行员的着舰训练是根据训练大纲进行的,着舰飞行参数是直观的、可导出的。高度H、经度LON和纬度LAT三个参数呈现出舰载机的空间位置;指示空速IAS反映出飞行员对速度的加减、保持以及在特定阶段按照指定速度飞行的能力;坡度ROL反映出飞行员在转弯时对坡度的掌控能力;航向角ψ反映了飞行员在整个模拟训练过程中对方向的控制能力;滚转角γ和俯仰角θ反映出飞行员在训练过程中对飞机姿态控制的能力[17-18]。综合考虑飞行参数的实际价值,该文选取H、LON、LAT、IAS、ROL、ψ、γ、θ八个飞行参数作为着舰评估关键点的特征参数。
1.3 数据处理
1.3.1 输入数据处理
从一次着舰训练中,提取五个着舰评估关键点的八个飞行参数作为一组输入数据,输入数据用矩阵A表示,如式(1)所示。对输入数据A进行预处理后,形成式(2)所示的1×40 的矩阵B作为BP 神经网络的输入数据。
1.3.2 输出数据处理
输出数据分为两部分,一部分为尾钩挂拦阻索情况,另一部分为专家组对着舰训练的评分。
1)尾钩挂锁部分
航空母舰甲板上有四根拦阻索如图2 所示,自舰尾起编号分别为拦阻索1-4,相邻两根拦阻索之间的距离为12 m,理想着舰点位于拦阻索2 和拦阻索3 中间[1]。针对每一次的着舰训练,为了区分着舰品质的优劣,将舰载机尾钩未挂锁、挂拦阻索1-4 设置相应的标签,并划分为“不合格、合格、优秀、良好”四个评估等级标准,如表1 所示。
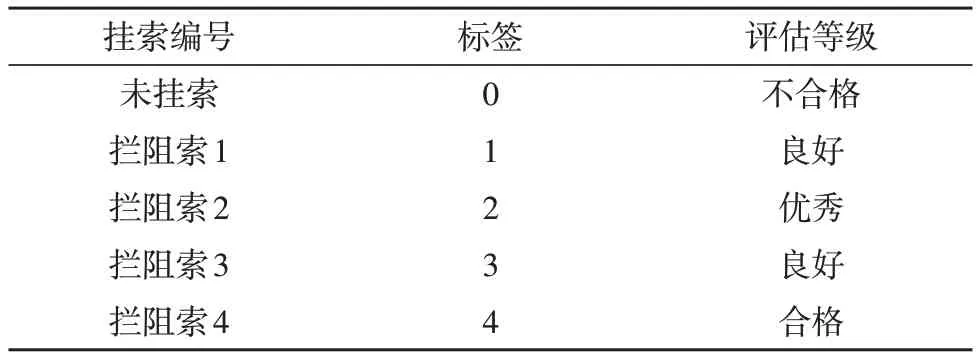
表1 尾钩挂锁情况
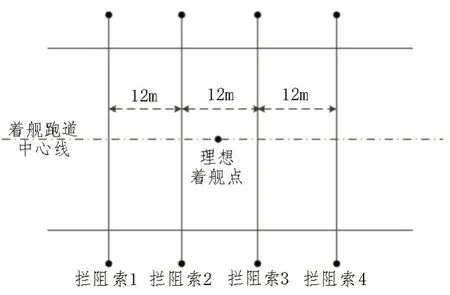
图2 着舰区域示意图
2)专家组评分部分
收集了来自一级飞行员(专家)、二级飞行员(中间水平人员)、三级飞行员(初学者)的300 条有效着舰模拟训练的飞行参数以及尾钩挂锁情况,并邀请9人评分组(3 名飞行教官、3 名着舰指挥官、3 名飞行员)进行评估打分。每次着舰模拟训练分值以10 分计,0 分代表着舰得分最低,10 分代表最完美的着舰分数。最后的分数标签由专家组的评分加权平均得到,其中飞行教官评分权重为0.5,着舰指挥官评分权重为0.3,飞行员评分权重为0.2。
2 评估网络
2.1 网络模型
BP 神经网络擅长处理函数拟合问题,一个神经网络有足够的元素(称为神经元)可以任意拟合任何数据的准确性,具有较强的非线性映射能力和柔性网络结构。BP 神经网络算法包括两部分:输入信号的前向传播和输出误差的反向传播。在前向传播中,输入信号通过隐藏层作用于输出节点,经非线性变换,产生输出信号,若实际输出与期望输出结果不一致则转入反向传播;在反向传播中,将输出误差通过隐藏层向输入层逐层反传,并将误差分摊给各层,并以各层获得的误差信号作为调整单元取值的依据[19-22]。考虑到着舰训练评估的非线性特性,BP 神经网络是效果较优的评估模型,该文搭建的BP 神经网络模型框架如图3 所示。
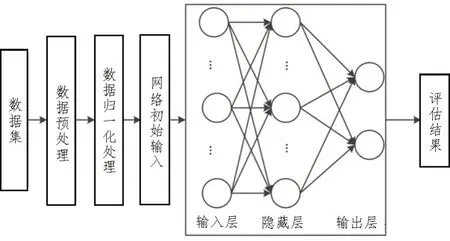
图3 BP神经网络模型框架
2.2 网络评估指标
为了评估该方法的预测性能,计算了平均绝对误差(eMAE)和相关系数(R)。eMAE表达式为:
其中,m为样本数量,为第i个样本的预测值,yi为第i个样本的真实值。值得注意的是,eMAE代表了1~10 分的分数误差;eMAE越小,预测性能越好。R定义为:
其中,m为样本数量,和分别表示真实值的均值和预测值的均值,yi和分别表示第i个样本的真实值和第i个样本的预测值。R用于测量预测与真实值之间的相关性;绝对值越高,性能越好。
2.3 网络参数确定
由1.3 节数据处理部分可知,网络输入参数为40,网络输出参数为2,因此构建的BP 神经网络的输入层神经元个数为40,输出层的神经元个数为2,根据经验公式(5)[15],初步估算隐藏层节点数为8~16。
其中,pn为输入神经元数目;pm为输出神经元数目;a为1~10 的常数,S为待估隐藏层节点数。
经过对网络模型的不断训练测试,从表2 测试结果可知,当隐藏层节点数为15 时,eMAE有最小值0.040 987,R值为0.972 30,满足评估设置要求。因此,BP 神经网络拓扑结构确定为40×15×2 的三层网络。

表2 隐藏层节点数与评估指标精度表
3 仿真验证
利用Matlab R2020a 软件对网络进行训练,训练次数设置为2 000 次,学习率为0.5,训练最小误差为0.003,隐藏层的激活函数为tansig,输出层的激励函数为purelin,训练函数为trainlm,学习函数为learngd。用经过预处理、归一化处理后的数据集,对网络进行训练和测试,训练好的评估网络拓扑结构为40×15×2 。用测试集对网络进行验证,网络性能达到了预期目标,所得预测值和期望值的误差对比图以及eMAE值如图4-6 所示。

图4 挂锁情况下测试集预测值和期望值的误差对比
对着舰训练过程中的尾钩挂锁情况进行测试时,将测试集送入训练好的评估网络,所得挂锁预测值与期望值的标签对比以及误差对比如图4 所示。从图4 中可以看出,预测值和期望值完全一致,误差为0,评估网络对挂锁情况的预测效果很精准。
测试集的期望分数值是由专家组的评分加权平均得到的,图5 给出了60 个测试数据的着舰真实分数、经过评估网络所得预测值以及两者之间的误差值。从图中可以看出,预测分数值与真实分数值比较接近,误差值集中在0 附近,对分数值的预测偏差较小。

图5 测试集专家评分期望值和预测值的对比
评估网络经训练、验证和测试后,得到图6 所示的网络训练误差曲线图。图6 给出了训练、验证、测试以及目标值的均方误差曲线关系,网络经过7 轮训练达到了最佳测试性能0.002 895 6,达到了着舰评估的性能要求。综合图4-6 的测试结果,得出该评估网络的性能达到了着舰评估的要求。

图6 网络训练误差曲线
4 结束语
针对飞行员着舰训练提出了一种基于BP 神经网络的网络评估方法,实现了对着舰过程中舰载机尾钩挂锁情况预测以及着舰训练品质的评估。经过验证分析,经由网络训练得到的挂锁情况、评分与真实挂锁情况、专家组评分基本一致,达到了预测评估效果。该方法不仅可以用于飞行员的自我着舰模拟训练评分,还可为着舰指挥官的指挥提供挂锁情况预测。
