多功能相控阵雷达行为辨识综述
2024-04-30付雨欣王建涛党同心李一鸣孙震宇
付雨欣,黄 洁,王建涛,党同心,李一鸣,孙震宇
(1.信息工程大学 数据与目标工程学院,郑州 450001;2.中国人民解放军63896部队,河南 洛阳 471000)
0 引 言
雷达电子侦察能够以非合作方式截获目标雷达辐射信号,并通过电子信号分析与处理获得雷达型号、信号样式、工作模式、威胁等级等信息,受到了各国的高度重视[1]。常规体制雷达主要采用机械扫描方式工作,辐射信号时序确定,旁瓣电平较高,雷达功能单一,信号样式简单,因此传统侦察接收机能够以较高概率截获信号,提取信号脉冲描述字(Pulse Describe Word,PDW)并进行后续的分选与识别[2]。然而多功能相控阵雷达(Multi-function Phased Array Radar,MPAR)采用电扫描方式工作,具有高速灵活的波束调度和切换能力,具备多种工作模式且其信号样式复杂多变[3],不仅使得传统侦察接收机截获MPAR信号的概率大大降低,也给后续信号的分选和识别带来挑战。由于本文研究对象是经过脉冲分选、型号识别后的单部雷达,因此仅关注最新的雷达辐射源识别方法而非分选技术。
雷达行为辨识是雷达辐射源识别的重要技术之一,能从信号层级表征和识别多功能相控阵雷达行为,挖掘隐藏在截获信号背后的目标雷达行为规律,从而提高侦察系统的智能决策能力[4]。根据文献[5]对电磁辐射行为学的定义,本文将MPAR在一段时间内执行某种任务的工作模式及转换规律的总和称为雷达行为。实际上,MPAR不仅能实现对目标的探测跟踪,还具有通信数据链和高功能干扰等功能[6],但考虑到目前大部分侦察接收机在对进行通信和高功能干扰的MPAR信号前期截获和分选效果较差,因此本文主要针对雷达对抗中经过分选之后与雷达探测跟踪功能相关的工作模式进行分析与识别。
目前,国内外学者开展了大量MPAR行为辨识的相关研究。文献[7]分析了非合作条件下的雷达辐射源数据特点,但对数据集调研不够全面,没有总结对应的信号模型。文献[8]对国内外的雷达工作模式识别方法进行了综述,缺乏对深度学习算法的对比分析,且没有归纳不同算法的适用场景。文献[9]总结了雷达工作状态识别的研究现状,但分类较为粗糙,且缺乏算法性能对比。文献[10]梳理了基于机器学习的辐射源识别方法,但并未区分雷达型号识别和工作模式识别。国外的综述[11-12]多集中于对雷达系统的正向机理性分析,上述文献的局限性在于没有对MPAR脉冲列模型、行为辨识关键技术、仿真数据集进行系统的归纳总结。
本文根据MPAR侦察脉冲列在复杂电磁环境下呈现出的信号特点,从数据压缩和数据修复两方面总结已有的信号建模方法。梳理了目前国内外进行MPAR行为辨识的一般工作流程,并对比分析了PDW序列单元提取和工作模式识别的典型算法性能和适用场景;归纳了目前常用的仿真数据集和评估标准;最后针对性提出了当前行为辨识技术在信号建模、PDW序列单元提取、工作模式识别以及仿真数据集构建方面存在的问题,并展望了未来研究方向。
1 MPAR信号建模
MPAR信号建模是指通过数学语言抽象出最具代表性的信号特征。目前,国内外进行MPAR行为辨识的一般工作流程是侦察方首先从接收机截获的中频信号提取出脉内和脉间参数,进行信号分选与型号识别,然后通过信号建模方法,构建MPAR截获脉冲列特征空间和行为的解空间相对应的映射关系,最后进行PDW序列单元提取和工作模式识别,如图1所示。

图1 侦察系统行为辨识工作流程Fig.1 Workflow of behavior identification of reconnaissance system
已有的信号建模方法多以多功能雷达(Multi-function Radar,MFR)为建模对象,但MPAR作为MFR的主要体制,两者具有相似的工作原理,因此本节合理扩大MPAR信号模型的适用范围,认为对MFR信号的建模方法也适用于MPAR,不对其进行区分。从21世纪起,陆续有学者对MPAR信号建模方法进行研究,但目前尚缺乏对不同建模方法的系统总结。由于MPAR具有高数据率、波束捷变、低截获等特点,刻画其辐射信号规律需要大量的长时间片段的数据,因此每段MPAR脉冲列的采集时长一般大于1 s,包含大量脉冲且信噪比较低。本节根据MPAR截获脉冲列的数据特点,将已有MPAR信号模型分为两类:一类是针对长周期信号片段的数据压缩模型;另一类是针对低信噪比脉冲列的数据修复模型。在实际工程应用中,两者可相互借鉴。
1.1 针对长周期信号片段的数据压缩模型
现代电子战中,随着接收机灵敏度的提升,经过分选后的单部雷达脉冲列可高达每秒2万个,给信号的实时处理和长期存储带来了极大的挑战。考虑到侦察脉冲列本质上属于非平稳时间序列,可以借鉴时间序列分析领域的实数序列“符号化”的处理思想,有利于降低后续PDW序列单元提取的计算量[13]。典型的符号序列模型有后缀树[14]、决策树[15]、Hash表[16]、Markov模型[17]等。Lavoie等[18]于2002年最早将Markov模型引入对MPAR信号的建模领域,将MPAR脉冲列视为隐马尔可夫模型(Hidden Markov Model,HMM),对采样后的脉冲列进行量化编码,将其转换为“01”符号序列。作为HMM模型的观测值,该符号序列不仅能反应出信号的动态特性,并且大大降低了数据量。在此基础上,Visnevski等[19-21]通过分析MPAR信号产生机理从而提出句法模型,将信号解构为雷达字、雷达短语和雷达从句3个层级,采用对应的随机上下文无关语法(Stochastic Context-Free Grammars,SCFG)来描述信号的产生和变化规律。该模型能从雷达信号发射的视角,通过有限语法规则集来分层描述从信号到行为的映射,与HMM模型相比,以较小的模型复杂度实现了对MPAR信号规律的表征能力的优化,进一步实现了数据压缩。进一步地,Visnevski等[22]提出了非自嵌入式上下文无关文法(Non-self Embedding Context-free Grammar,NSECFG)来分析MPAR系统中不容易被SCFG捕获到的复杂雷达行为。Apfeld等[23]将雷达字拆分为雷达音节和字母,分别表示调制类型和调制参数,这种两级参数扩展使该模型具备更细粒度的表征能力。在句法模型的基础上,国内学者也开展了一系列建模研究。刘章孟等[24]根据复杂度最小化准则提出了侦察环境中MPAR脉冲列的字符串表达形式与语义编码模型,降低了MPAR侦察脉冲的层次化结构列复杂度,得到了更简洁的语义信息。马爽[25]建立了针对MPAR信号的层级结构模型,将信号按结构要素和功能要素进行形式化表示,创新性地提出了将信号产生系统与生物体细胞类比的思想。
1.2 针对低信噪比脉冲列的数据修复模型
雷达侦察方面临的另一主要挑战是如何减小测量噪声对截获信号造成的巨大影响。测量噪声带来的影响主要包括以高斯白噪声为典型代表的环境噪声造成的信号参数值抖动、接收机和雷达发射机的异步性以及前期分选算法无法准确分离不同雷达辐射源信号从而造成的漏脉冲和伪脉冲等情况[26]。因此,一些学者从侦察的角度出发,将建模对象从MPAR系统本身转移到MPAR截获脉冲列,希望通过逆向建模重构反映MPAR脉冲列层次化结构和变化规律的数据修复模型。
Haykin等[27]指出,MPAR信号的观测序列被视为来自句法模型的字符串,被测量噪声破坏,因此提出利用局部可观测马尔可夫决策过程(Partially Observable Markov Decision Processes,POMDP)理论,建立一个能被动感应和操作非合作MPAR信号的电子战支援系统。相对于HMM模型,POMDP对信号的表征能力更强。欧健[13]引入了线性预测状态表示模型(Predictive State Representation,PSR),考虑到伪脉冲可能被建模为仅出现一次的错误雷达字串,其转移到下一事件的概率均为1,但这些概率没有实际意义,因此通过噪声阈值实现对状态转移频数矩阵的降噪处理。相对于HMM和POMDP模型,改进的PSR完全根据可观测的量来表现系统的状态,且加入了抗噪处理,鲁棒性更强。
1.3 典型模型对比
本节总结了典型的MPAR信号模型特点,如表1所示。从表中可以看出,无论是针对长周期信号片段的数据压缩模型还是针对低信噪比脉冲列的数据修复模型,其实质都是动态系统模型,各自有对应的适用场景,并且随着建模方法的不断发展,MPAR信号模型对复杂电磁环境中的信号的表征能力也在逐渐增强。

表1 典型MPAR信号模型对比Tab.1 Comparison among typical MPAR signal models
2 PDW序列单元提取
传统的信号分析方法是基于统计参数模型,以单脉冲为基本信息单元,而对MPAR这种具有复杂结构的信号而言,其基本信息单元不再指单个脉冲,而是上一节所述的MPAR信号模型提出的波形单元(即PDW序列单元,是指有限个脉冲的一个优化排列[25]),与句法模型提出的雷达字、语义编码模型提出的脉组的表述相似。因此,本节将雷达字和脉组统一归为PDW序列单元的范畴,MPAR信号规律可以用这些基本信息单元进行简洁地表示。对于侦察方而言,行为辨识的首要工作就是提取截获脉冲列中的PDW序列单元,从而实现对信号的初步分割。PDW序列单元提取作为一种时间序列切割技术,其一般流程如图2所示。可从是否掌握目标先验知识的角度将其分为两类:一类是针对已知目标的匹配分类技术;一类是针对未知目标的变换点检测技术。

图2 PDW序列单元提取一般流程Fig.2 General process of PDW sequence unit extraction
2.1 针对已知目标的匹配分类技术
在早期研究PDW序列单元提取技术时,多假设MPAR为已知目标,即侦察方已经掌握一定的信号调制类型、信号参数范围、工作模式转换规律等先验信息,因此可采用有监督学习框架下的匹配分类技术。该方法原理简单,工程实践性强,最先得到发展并趋于成熟。Visnevski等[19,28]最早提出了两种有监督的雷达字提取方法:一种是将脉冲前沿量化编码后构建各雷达字的HMM模板,再利用维特比算法将其与待提取的编码序列匹配,求解最优的雷达字序列[19];另一种称为事件驱动的雷达字提取算法[28],通过计算编码序列与模板的匹配概率实现雷达字提取,其精度与量化时钟周期无关,复杂度较低。
沿用HMM模板匹配的思路,刘海军等[29]考虑到虚假脉冲和漏脉冲的影响,针对模板匹配方法依赖于时钟周期所描述的量化精度并且对模型参数敏感不易工程实现的缺点,提出一种基于三级匹配的雷达字提取方法,将匹配过程分为数据库级的滤波、脉冲级的基于脉冲到达时间(Time of Arrival,TOA)的粗匹配,和编码序列级的基于序列相关技术的精细匹配。Li等[30]对该方法进行改进和扩展,将由TOA生成的脉冲重复间隔(Pulse Repetition Interval,PRI)信息与PDW中的其他参数相结合,得到雷达字联合识别多维图,从而提取编码到脉冲列中的雷达字。该方法称为改进的TTP(TOA to PRI)变换。欧健[13]引入了脉宽(Pulse Width,PW)信息改善编码过程,并根据雷达字模板构造匹配滤波器,匹配滤波后的峰值所对应的一段脉冲即为待提取的雷达字。
沿用事件驱动的思路,林令民[31]针对传统方法只利用了TOA这一个特征参数的局限性,引入了相参处理间隔(Coherent Processing Interval,CPI)信息。根据CPI先对全脉冲数据进行分割,将具有相同PRI的CPI视为一类雷达字,利用训练好的HMM模型对分割后的脉冲列进行雷达字提取,并且建立观测状态的哈希索引表以提高算法时效性。但当PRI调制类型为参差时,该算法会将同一类雷达字错分为多类。针对上述问题,王勇军等[13,32]通过引入PW改进脉冲前沿量化编码方式,再计算事件驱动概率,最后利用决策准则提取概率最高所对应的雷达字,带来的好处是随着码元长度的增加,降低了脉冲前沿量化误差的影响。
除此之外,陈维高等[33]引入深度学习技术,摒弃传统依赖脉冲列分析技术对MPAR信号进行处理的方法,将栈式降噪自编码器(Stacked Denoising Auto Encoders,SDAE)与常用的支持向量机(Support Vector Machine,SVM)分类算法结合,借助参数间的联合变化特征,提高了PDW序列单元识别的鲁棒性和泛化能力,但算法准确率对样本波形库参数设置敏感,且存在网络过拟合、运算复杂度高等问题。
2.2 针对未知目标的切换点检测技术
随着低截获概率雷达技术发展,侦察方对非合作MPAR先验知识的获取难度陡增,促使研究重点转为在无监督学习框架下利用参数变化特点进行PDW序列单元提取的切换点检测技术。需要说明的是,有的学者将PDW序列单元视为参数值不同、调制类型相同的子工作模式[34-35],但其实质仍然是对切换点进行检测。因此,本文认为该类方法实质是对PDW序列单元的提取,而非更具一般意义的工作模式的识别。目前,切换点检测技术大致分为两类:一类是聚类分析;一类是统计分析。
聚类分析希望对MPAR脉冲列中具有相同参数特征的脉冲点进行聚类,从而获取类间切换点。张双图[36]、阳榴等[37]、高天昊等[38-39]均利用MPAR脉冲列包含的载频(Radio Frequency,RF)、PRI、PW多维参数,采用不同聚类算法提取PDW序列单元。其中,阳榴等将多个变化点检测问题转化为二分类问题,利用参数自适应的密度聚类算法(Density Adaptive Density-Based Spatial Clustering of Applications with Noise,DA-DBSCAN)进行PDW序列单元的提取;高天昊等引入一种改进的基于网格的聚类(Clustering in QUEst,CLIQUE)算法,利用基于密度调整的边界扩展提高聚类准确性,但该算法仅适用于接收雷达信号工作模式种类较为均匀的场景,因此针对侦察设备在只能采集到某些工作模式下的少量数据的特殊场景下,获得雷达样本数据非均衡这一问题,通过构建虚拟聚类中心和簇合并,引入改进的基于层次密度的聚类算法(K-means-Ordering Points To Identify The Clustering structure,K-OPTICS),很好地解决了非均衡样本下的雷达字提取问题。Zhu等[40]则根据目标MPAR工作模式数量、调制参数模型、标签序列3类先验知识是否已知,提出了在全先验、半先验、和无先验知识3种渐进假设下的子算法,其中,在半先验下和无先验知识的情况下分别采用基于动态规划的自顶向下的分割聚类和基于滑动窗口的脉冲列聚类算法。以上聚类算法虽然原理易懂,工程实现难度低,但存在的共性问题是需要遍历全部数据,运算量较大,且对聚类参数依赖性强。
统计分析希望对MPAR脉冲列不同片段服从的特定分布进行似然比检验,从而获取分布模型切换点。马爽等[41]建立了幅度序列的统计变化点模型,引入生物染色体分析中的循环二分算法来检测幅度变化点。鲍加迪等[34]则建立自回归模型进行数据预处理,并根据PRI调制特征提出了参数未知的定长取样(Unknown-Fixed-Size-Sample,U-FSS)算法和参数未知的累积和(Unknown-CUmulative SUM,U-CUSUM)算法,不仅可以实现调制参数级的雷达字在线切换点检测,还可以给出切换点前后调制参数值的准确估计。方旖等[42]用定长的滑窗遍历PDW序列,根据贝叶斯准则逐步计算条件概率,通过滑窗数据的概率变化来划分脉冲列,但对于如何选取滑窗长度及步长缺乏参考依据。以上统计分析方法以概率计算为基础,对时间序列的完整性和可靠性要求较高,在数据分布未知时具有较大局限性。
2.3 典型算法对比
本节总结了典型的PDW序列单元提取算法特点,如表2所示。从表中可以看出,匹配分类技术需要大量先验知识做支撑,但识别准确率较高,即使存在测量噪声,平均准确率仍然能够达到95%以上;而切换点检测技术无需先验知识,对于雷达侦察方而言,能解决对非协作目标侦察的问题,但识别准确率较低,一般保持在90%左右。
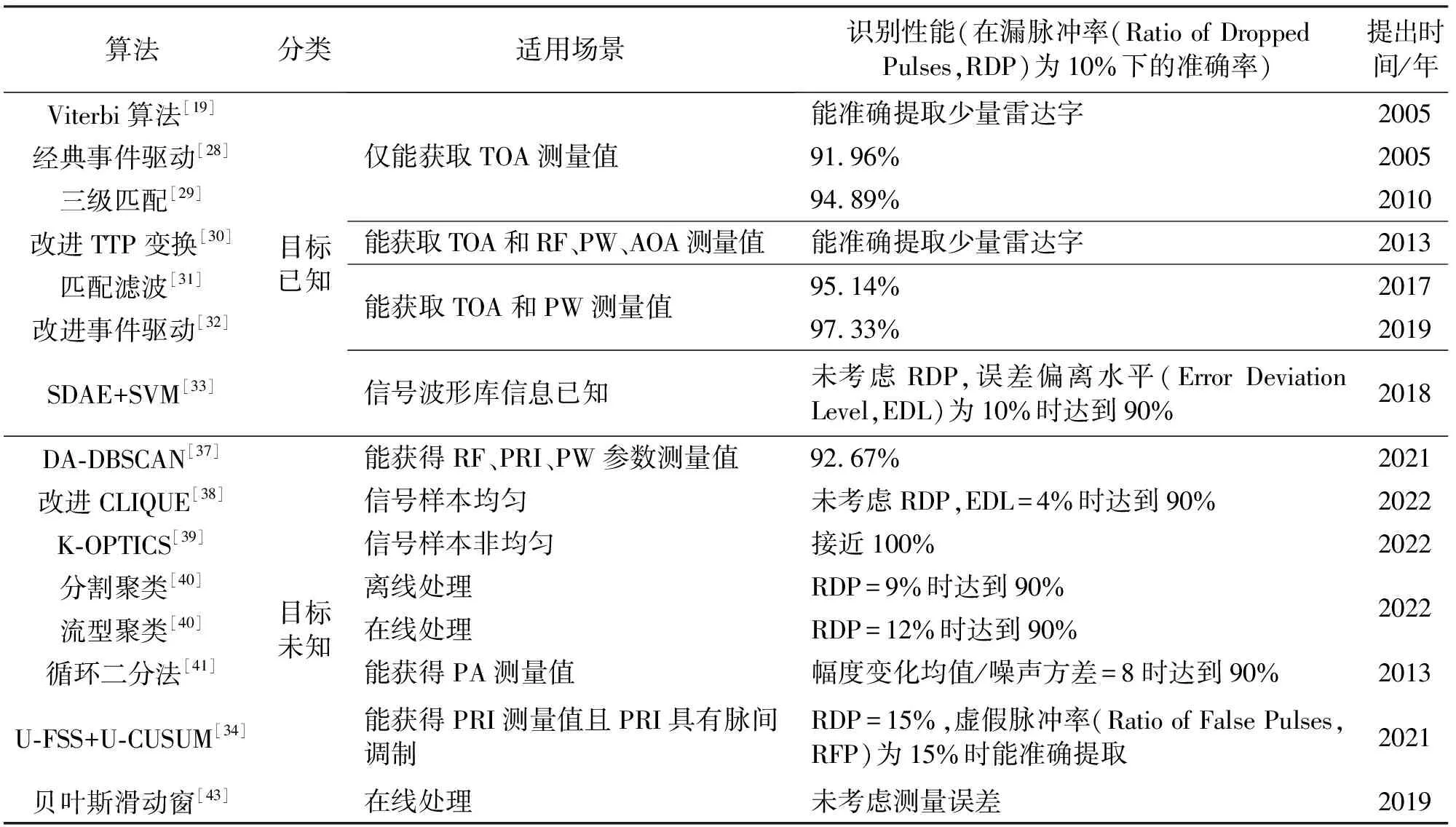
表2 典型PDW序列单元提取算法对比Tab.2 Comparison among typical PDW sequence unit extraction algorithms
3 MPAR工作模式识别
MPAR工作模式是指MPAR为完成搜索、跟踪、识别、导航等多种功能所处的不同工作状态,常见的工作模式有速度搜索(Velocity Search,VS)、边跟踪边搜索(Tracking While Scan,TWS)、边测距边速度搜索(Velocity Search Range,VSR)、跟踪加搜索(Track and Search,TAS)、边测距边跟踪(Range While Search,RWS)、单目标跟踪(Single Target Track,STT)等[43]。面向行为辨识的MPAR工作模式识别就是根据不同工作模式下信号的参数特征和变换规律,可对经过分割后的脉冲列中所属同一工作模式的PDW序列单元进行重组,也可直接从原始脉冲列中提取工作模式,流程如图3所示。此外,根据句法模式的概念,本节认为雷达短语与工作模式内涵相同,不作区分。在此之前,已有文献[8-9]对MPAR工作模式识别方法进行归纳总结,然而随着研究不断深入,上述文章已无法涵盖该领域的新技术。尤其是近年来,深度学习在MPAR工作模式识别领域得到了广泛应用[44]。基于深度学习的智能算法能准确描述高维信号参数特征空间内各参数间的相互关系,具备较强的特征挖掘能力,可以有效改进传统工作模式识别存在的问题:一是利用小样本学习的典型算法改善传统网络由于缺乏标签样本而造成的识别性能严重下降;二是通过优化网络架构等削弱测量噪声给信号数据的结构特征带来的影响。本节按照上述两类改进思路对已有文献进行梳理并对典型算法性能进行对比分析。
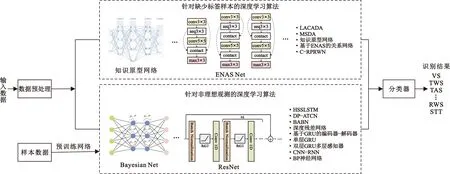
图3 基于深度学习的MPAR工作模式识别一般流程Fig.3 General process of MPAR work mode recognition based on deep learning
3.1 针对缺少标签样本的深度学习算法
由于雷达侦察在军事应用上的特殊性,实际研究中,对MPAR进行工作模式识别时往往缺乏带标签的样本数据,此时利用传统的深度学习网络容易出现过拟合、欠拟合等问题。因此,引入小样本学习的思路应运而生,即通过数据增强和扩充等手段使得在样本有限的情况下,网络也能快速理解新模式并将其泛化,获得准确且稳定的识别性能[45]。小样本学习目前主要包括3类:一类基于模型微调;一类基于数据增强;一类基于迁移学习[46]。目前,根据对已有雷达情报的分析,能够获知一些通用的不同工作模式下的MPAR信号变化规律,因此引入基于数据增强和迁移学习的小样本学习方法是行为辨识领域的前沿研究方向。
Zhang等[47]借鉴数据增强的思想,提出了一种包含局部对齐、交叉对齐和分布对齐的复合对齐特征(Compound Alignments,Containing Local,Cross,and Distribution Alignments,LACADA)算法,将MPAR在不同工作模式下生成的长脉冲列、短脉冲列和辅助语义信息映射到一个共享的潜在变量空间,利用变分自编码器学习样本增强后的真实分布,最终实现在仅检测到少量脉冲列时即可完成工作模式的快速识别。虽然目前没有学者在行为辨识领域引入数据增强中的经典生成式对抗网络(Generative Adversarial Net,GAN),但Liu等[48]运用边际化堆栈降噪自动编码器(Marginalizing Stacked Denoising Auto-encoder,MSDA)模型提取信号幅度特征,从而实现无监督条件下的快速识别。利强等[49]借鉴迁移学习的思想,提出了一种在原型网络(Prototypical Network,PN)中融合先验知识的模式识别方法,通过训练原型网络,中心网络映射知识向量,重新训练融合先验知识的原型网络,实现先验知识与MPAR信号脉冲数据的深层融合。Zhai等[50]考虑到噪声影响,引入自动机器学习框架进一步优化关系网络,引入了高效神经结构搜索(Efficient Neural Architecture Search,ENAS),通过ENAS自适应生成最优特征提取网络,将提取到的信号调制特征送入连接的相似度网络实现最终分类。Zhai等[51]同时还提出一种编码细化原型随机游走网络(Coding Refined Prototype Random walk Network,C-RPRWN),通过增加TOA量化编码和正则化预处理模块,提升了算法的准确性。
3.2 针对非理想观测的深度学习算法
非理想观测指存在测量噪声的信号环境。非理想观测下,信号数据会呈现出长度不固定、数值缺失、数值抖动、数值异常等特点,给识别算法带来巨大挑战。为了克服这类问题,学者们针对损坏数据特点,引入相应网络并进行结构优化,有效提高了识别性能。Li等[35]将长短时网络引入工作模式识别领域,提出了一种层次化序列到序列的长短时网络(Hierarchical Seq2Seq Long Short Term Network,HSSLSTM),利用固定阈值归一化后带标签的MPAR脉冲列构建数据集,输入双向长短期记忆网络,最终确定工作模式转换的边界,对复杂长序列拥有较强识别能力。Tian等[52]利用基于形状下降正则化双路径注意力时间卷积网络(ShakeDrop-regularized Dual-path Attention Temporal Convolution Network,DP-ATCN)延长PDW特征保存时间,进一步改善对短时序列识别效果差的问题。Du等[53]将概率图模型引入工作模式识别领域,提出了贝叶斯注意信念网络(Bayes Attention Belief Networks,BABN),将原始卷积神经网络(Convolution Neural Networks,CNN)模块权重建模为概率分布,在所提出的BABN中结合填充操作和注意模块,使得该网络能处理可变长度的序列数据。Pan等[54]提出了一种基于深度残差网络和SVM级联的框架,从参数范围、功能指标、数据规律等3个维度中提取特征,对同时存在漏脉冲、伪脉冲、测量误差的信号也能达到高识别精度。Chen等[55]提出了一种编码器-解码器架构下的基于门控循环单元(Gated Recurrent Unit,GRU)的识别方法,利用编码器提取脉冲列时间特征和工作模式转换规则,利用解码器来解码特征和转换规则,并采用标签替代解码器结构提高了在非理想情况下对工作模式的识别能力。Xu等[56]最早构建了基于GRU的工作模式识别方法,与预测模型[57]相比具有更好的识别性能。进一步地,为了能直接处理原始MPAR脉冲列损坏数据并自动进行特征提取,Xu等[58]提出了一种由两个GRU级联的网络,第一个GRU从输入MPAR脉冲列中提取雷达字的向量表示,第二个GRU作为状态识别器。此外,惠晓龙[59]将多层感知器引入了工作模式识别领域,贠洁[60]利用CNN和循环神经网络(Recurrent Neural Network,RNN)分别提取数据空间特征和时序信息。上述方法在仿真时均能实现低信噪比下的工作模式识别。方旖等[61]则利用误差反传(Back Propagation,BP)神经网络,在构造样本时对原始脉冲列进行数据分割、数据补齐、数据推理以消除噪声影响,但是网络结构过于简单,识别准确率不高。
3.3 典型算法对比
本节总结了典型的工作模式识别的深度学习算法特点,如表3所示。从表中可以看出,针对缺少标签样本的深度学习算法希望在训练中利用有限标签样本数据挖掘到更多的信息,因此数据预处理手段更为丰富,往往是对信号参数进行拓展,而针对非理想观测的深度学习算法希望实现对损坏脉冲数据的自动特征提取与高精度识别,数据预处理手段更有针对性,往往是对信号参数进行压缩,两者准确率均能达到90%以上,在MPAR工作模式识别领域的应用情况良好。
4 MPAR仿真数据集现状
由于MPAR行为辨识技术的保密性,目前大多数文献中使用的均为自行构建的仿真数据集,存在3类问题:一是多数文献未结合MPAR工作机理,生成的仿真数据往往与实际应用不符合;二是缺乏描述参数变化规律的数学公式,数据选取随机性过大;三是缺乏从侦察方的视角出发,统一提出的数据集和识别鲁棒性与准确率的评估标准,导致不同算法性能对比存在困难。因此,为了减小因仿真数据集的不规范给行为辨识技术发展带来的影响[63],本节对已构建的典型数据集和评估标准进行归纳总结,为后续学者在行为辨识领域构建统一、公开、合理的MPAR数据集和评估标准提供参考。
4.1 数据集简介
目前已建立的仿真数据集主要可分为3类。
第一类是真实雷达数据集,以防空多功能雷达“水星”为代表,明确给出了不同工作模式下的PDW序列单元排列组合方式,以符号化的形式描述PDW序列单元,但并未给出对应的脉冲级参数。在实际应用中,该类数据集一般用于需要仿真“符号化”信号的仿真环境。
第二类是波形库,有不同工作模式和PDW序列单元对应的PRI、RF、PW的脉间调制类型、参数值和脉冲数。在实际应用中,该类数据集涵盖信息较为完备,应用范围最广。
第三类是调制参数表,有明确的PRI、RF、PW的调制类型、参数范围。在实际应用中,该类数据集缺少调制参数具体值和PDW序列单元、工作模式的对应关系,因此一般用于产生少量样本或信号样式变化较为简单的仿真环境。
上述3类仿真数据集的典型示例可微信扫描本文OSID码查看。
4.2 评估标准
在测量噪声量化指标方面,Visnevski等[19]最早提出脉冲杂散率的概念,将其定义为出现的伪脉冲总数与总观测时间的比值:
(1)
刘海军[27]提出了RDP和RFP的概念,定义如下:
(2)
(3)
式中:Ni为无噪声模板脉冲列中的脉冲数;ni为在无噪声序列中随机丢弃的脉冲数;ξi为在无噪声序列中随机添加的脉冲数。
由于MPAR仿真信号的数据形式不同,因此目前的噪声也可分为直接对原始脉冲信号添加的不同方差和均值的高斯白噪声,和添加在脉冲参数值上的EDL[26],定义如下:
(4)
式中:xpi为无误差数据;ξpi为随机测量误差。
在算法性能评价方面,根据算法的不同特点,可以利用多分类任务常用的混淆矩阵来评价算法对不同类型的PDW序列单元和工作模式的检测能力,典型的参数有准确率、PR曲线、F值等[63]。
5 问题与展望
5.1 存在问题
MPAR系统的不断发展创新,给MPAR行为辨识领域(与探测跟踪功能相关的部分)带来的问题主要体现在以下方面:
1)在行为建模方面,一是数据压缩模型在对雷达行为层的信号特征进行细粒度划分时缺乏统一的数学定义,难以对雷达行为到发射信号参数的映射关系进行直接、简洁的表示,因此无法同时满足模型低复杂度和高精度求解;二是数据修复模型缺乏对测量噪声的定量分析,因此求解时无法根据噪声特性自适应地寻优去噪。
2)在PDW序列单元提取方面,一是匹配分类技术在缺乏先验知识的情况下挖掘高维信号特征的能力大幅度下降,难以分析时敏性非协作目标;二是变换点检测技术缺乏对算法性能下限、运算复杂度以及实时性的讨论,难以平衡信号分析时效和识别准确性的关系,而这是雷达侦察方关注的重要指标。
3)在工作模式识别方面,一是小样本学习和无监督学习在多功能雷达工作模式识别领域应用才刚起步,模型的泛化能力还无法保证,且对超参数的确定存在依赖人工和计算量庞大等问题;二是在非理想观测条件下未能充分利用MPAR脉冲列中前后脉冲的强相关性,缺乏对受噪声影响的残缺数据的有效处理。
4)在数据集构建方面,数据构造主观性较强,缺乏统一的构造标准,导致数据格式和评价指标多样,给后续研究中算法性能对比、算法优化造成了阻碍。
5.2 未来展望
基于以上分析,梳理出以下未来多功能雷达行为辨识(与探测跟踪功能相关的部分)技术的发展方向:
1)在行为建模方面,需要结合数据压缩模型和数据修复模型的优缺点,进一步改进已有典型模型,提出适应日益复杂脉冲列形式的新模型。
2)在PDW序列单元提取方面,可以引入时间序列异常点检测领域的最新技术,如深度学习中的多模态特征融合[64]、注意力机制[65]等,以实现在复杂电磁环境中能快速提取隐藏在MPAR脉冲列时序结构中的PDW序列单元。
3)在工作模式识别方面,需要充分考虑不同神经网络的结构特点与适用场景:一是可以引入经典的无监督学习网络如生成对抗网络[66],以进一步降低智能算法对数据集的依赖性;二是可以在数据预处理时引入时序数据异常检测和修复的典型算法,以消除非理想观测给信号序列带来的影响,并可通过轻量化设计[67]、硬件加速提升智能算法的收敛速度。
4)在数据集构建方面,亟需构建一个具有统一数据结构的、符合雷达正向工作原理的仿真行为辨识数据集,以方便后续模型构建与算法研究。
6 结束语
本文对目前国内外的多功能相控阵雷达行为辨识技术进行了总结,并对比分析了典型算法的性能与适用场景,梳理出该领域目前存在的问题以及可能的发展方向。
此外,具有认知能力的MPAR的出现是目前雷达技术发展的大势所趋,该类新型雷达能在人工智能的辅助下具有行为演化与环境自适应能力[5],对该类雷达行为的准确辨识与预测是未来雷达领域亟需重点研究的内容,需要结合不断积累的雷达行为知识库与人工智能手段进行更深入的研究。