无人船在淮河河道断面监测中的应用
2024-04-29戴碧碧
戴碧碧
(安徽省淮河河道管理局测绘院,安徽 蚌埠 233000)
0 引言
随着我国河长制的全面推行,加强河流管理及监测,对积极开展水资源调查和保护具有重要作用[1]。河流监测包括河道水上监测和水下监测2种。河道水下监测即河道水文测验断面的测量简称大断面测量,其是河流水文测验的基础要求之一[2-3]。
水深测量是河道水下地形测量中主要内容。由于水下作业,需要安全适用的载人工具,并且水下测量作业存在较多的危险因素威胁监测人员的生命安全。采用一种自动化可控的智能无人测量船进行河道水下测量作业,具有极为重大的意义。近年来随着科技发展,无人测量船在测绘行业中逐渐被推广应用[4-5],有效提升了工作效率,并且保障了外业测量人员的作业安全。
无人测量船主要包括无人驾驶系统、实时通讯系统、数据采集系统等多种先进技术。通过无人船搭载GNSS-RTK进行精确定位,采用超声波测深仪进行深度测量,采用计算机对测量数据进行分析处理,绘制河道大断面图[6-7]。无人船轻便快捷、灵活性高、适用性强,在水深、水域狭窄、拐弯位置多等复杂性水域具有极强的应用优势[8];并且其搭载多项精度性强、专业化程度高的测量设备,能够更加准确、全面的获取河道信息数据,从而使得测量过程智能化、测量结果准确度高[9]。
淮河干流经流安徽穿境而过,河道内水运繁忙,是安徽境内主要的水运航道之一。由于地质灾害、河流崩岸等状况综合影响,致使淮河河床淤积、河道大断面参数改变,使得淮河排洪不畅,洪涝灾害频发,并且对河道航运产生不利影响[10]。本文以安徽省淮河干流哑吧渡段为监测案例,使用无人船搭载GNSS-RTK技术及超声波测深仪进行河道大断面监测,结合往年监测数据,分析河道大断面变化情况为河道治理提供参考依据[11]。
1 无人船测量工作原理
1.1 测量系统简述
本项目采用iBoat BS2型无人船水深测量系统,本系统船载GNSS-RTK定位系统,进行水面平面位置定位。采用超声波测量仪(中海达测深仪MAX)进行水深测量。岸上控制部分主要包含无人船控制系统专用软件、GNSS-RTK定位软件系统、测试仪数据采集系统等,通过工程之星3.0、南方CASS9.1、中海达测深仪数据处理软件对河道测量数据进行处理。
1.2 无人船水深测量原理
测深仪的主要工作原理是利用超声波穿透不同介质并在不同介质的表面发生反射,并经过数据计算处理得到测量深度。无人船底部安装换能器发射脉冲声波至水底,声波至水底发生反射并被换能器接收。此过程中,从换能器发出声波至接收到反射声波所用时间为t,声波在水中传播速度为v,忽略换能器反映时间及其他影响声波的因素。推算无人船底换能器至水底的深度:
h测深=vt/2
(1)
由GNSS测得空间坐标(x,y,H),水底高程HM:
HM=H-h1-h2-h测深
(2)
式中,h1—测量船面至测深仪的垂直高度,m;h2—船上GNSS接收机天线距离船面高度[12],m。
无人船测深原理如图1所示。

图1 无人船大断面测量原理
1.3 测量过程控制
河道大断面测量中,河床陆地部分采用GPS-RTK进行作业,使用南方银河系列动态双频接收机配合专业的数据采集软件工程之星3.0进行数据采集。为保证测量数据的一致性和准确性,在项目建立的过程中各RTK输入的参数与控制点保持一致。对RTK采用同一控制点进行点校正,然后在另一控制点上进行平面与高程的校正精度核验,使得点位平面较差不大于0.1mm,高程较差不大于1/10的基本等高距。校正精度符合规范要求后进行测量数据采集。
本项目测量采用GNSS-RTK测量技术,GNSS定位所用卫星的高度角参数设置为大于10°,观测卫星数≥5,PDOP值小于6,确保定位精度,尽可能减小多路径效应的不利影响。规划无人船测量路径,根据大断面测量的需要进行相应位置测点定位及测深;根据软件的显示的偏航数据,实时调整修正无人船航向,保证测船始终沿着预定的主测线方向航行。无人船测量河道大断面流程如图2所示。

图2 无人船大断面测量技术流程
2 淮河大断面测量及数据处理
2.1 河道大断面测量及数据采集
本次研究以安徽省淮河干流哑吧渡段为监测对象。测量前,校对设备时间,启动软件,设置定位参数并记录;测量过程中为测船导航,引导测船进行规划范围内河段的断面测量,并随时修正无人船的航向,确保无人船沿着主测线方向航行。检测线的定位点间距根据测量比例进行加密至在规定范围内与主测线保证有重合点。
测深过程中,对河道测深断面与测深断面进行垂直相交检查,检查点数不少于5%。检查断面与测深横断面相交处,图上1mm范围内水深点的深度检查较差不应超过规定值:当水深H≤20m时,深度检查较差限差为0.4m;当水深H>20m时,深度检查较差限差为0.02×H[13]。
2.2 测量数据处理
使用南方测绘公司开发的CASS9.1地形地籍成图软件进行数据处理,形成图形。等高线的绘制保证精度,线划均匀,光滑自然,遇到双线河渠以及不以比例绘制的符号时中断。绘制的等高线的坡向不能判别时,加绘示坡线。等高线生成后对照实地进行检查,及时进行错误纠正。
河道横断面数据采用Excel进行处理,对测量数据进行归类、合并,检查数据合理性。然后将同一断面的测量数据,按照从左岸到右岸的顺序进行排列,计算所有点在断面线上的映射点至基点之间的距离和各点偏离断面线距离。计算起点距精确至0.01m,高程精确至0.01m。采用南方CASS9.1专业绘图软件绘制测量河道断面图,断面图横比例尺为1∶1000,纵比例尺为1∶100。
本研究测量数据处理后,通过南方CASS9.1专业软件进行绘图,淮河干流哑吧渡河道大断面图,如图3所示。
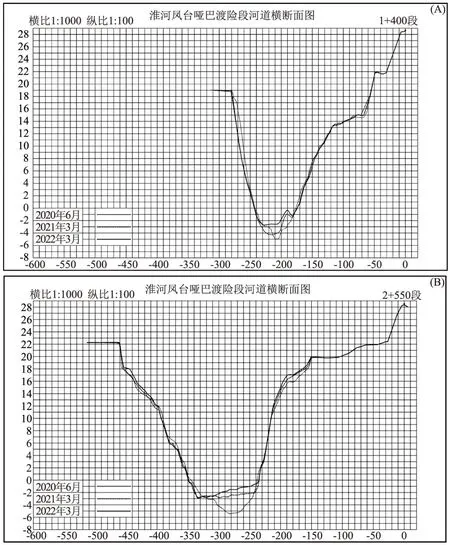
图3 河道大断面
3 测量数据精度及误差分析
3.1 测量数据精度分析
本研究河道横断面水深测量精度评定采用布设检查线法进行检验。根据标准《水运工程测量规范》JTS 131—2012要求,测深检查线与主测深线相交处、单波束测深不同作业组相邻测段或同一作业组不同时期相邻测深段的重复测深线的重合点处,图上1mm范围内水深点的深度比对互差均满足:水深H≤20m时,深度对比互差ΔH≤0.4m;水深H>20m时,深度对比互差ΔH≤0.02H。选取距离测量断面1m内的检查测量断面线数据进行对比互差。计算公式为:
H=|Hi-Hj|
(3)
式中,Hi—主测线深度,m;Hj—检测线深度,m。
该断面测量线与检查断面测量线重叠1857点,其中数据异常点6个,视其为粗差值,重叠点数据对比互差结果统计见表1。

表1 河道大断面测量精度评价表
本次测量河道大断面最大深度约为16.81m,水深未超过20m,依据《水运工程测量规范》JTS 131—2012要求,本次测量深度对比互差值ΔH≤0.4m即为测点合格,根据数据分析显示,测量合格点数为1798个,合格率为96.82%;其中53个测量值为超限点,6个数据异常点。
对测量数据进一步进行数理统计学分析,剔除6个数据异常点,对其他对比互差值进行统计计算,进一步分析误差的分布和统计规律。根据对比互差值分布,对其进行区间分组,共分为10组,进行分析统计,数据统计结果见表2。
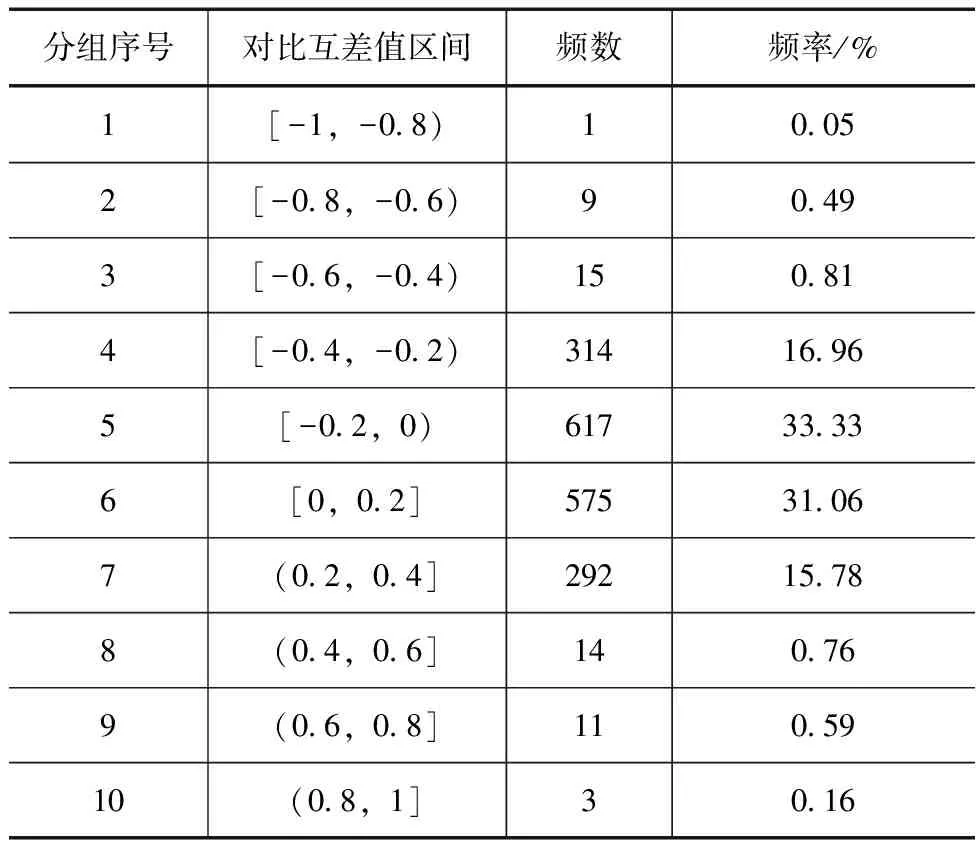
表2 河道大断面深度比差统计表
由表2可知,河道大断面测量深度对比互差值分散集中,主要分布在[-0.4,0.4]之间,该区间频率为97.14%,表明测量深度对比互差值具有聚集性;并且所有测量深度互差值在[-1,1]范围之内,同时表明其具有有界性。因此,该淮河干流哑巴渡段河道大断面深度测量数据互差值近似符合正态分布,正态分布图如图4所示。

图4 河道断面深度对比互差值分布直方图及正态分布曲线
3.2 数据误差分析
河道大断面数据测量过程中的误差产生主要包括:系统误差和偶然误差。其中,系统误差产生的主要原因包括:测量仪器的分析精度、测试方法局限性等。为避免系统误差的干扰,对测量仪器及系统进行定期校正,减小仪器系统误差;测量方法采用行业内最新的规范要求及方法替代传统方法,降低测量方法的局限性。
偶然误差主要包括:测量过程中环境影响、水下环境影响、河流状况的影响等。
(1)测量环境的影响主要包括行船过程中天气、风速、河道浪高等导致测量过程中无人船的行驶路线及船体行驶状态不同而形成测量误差。因此在测量过程中选取天气变化小、风力低状态进行,尽量降低外界环境对测量数据影响。
(2)水下环境如河道淤泥不均匀堆积、河内水草对声波的影响、河内垃圾造成声波反射虚假信号等因素,均造成无人船测量数据产生误差。为降低这一系列因素对测量结果的影响,测量过程中采用多条检查线进行复核,降低测量数据偶然误差。
(3)无人测量船体积小、质量轻,水流作用对船只航行航线影响较大,测量过程中导致船只航行路线偏离,从而可能导致测量数据的偶然误差。
4 河道现状分析
通过对淮河干流哑巴渡段河道大断面历年监测数据进行对比分析,河道大断面历年监测数据结果汇总如图3所示。由河道大断面图可知,安徽境内淮河河道干流哑巴渡段河床呈“U”型结构;通过对2020—2022年1+400段以及2+550段河道大断面图进行数据对比分析,淮河河道干流哑巴渡段呈现河床逐年淤积现象,泥沙淤积导致河道深度减小,并且河道右侧淤积程度较左侧更为明显。从图中河道坡度对比分析,右侧河道坡度逐年增大,表明河流右侧受水流冲刷更为严重,河流冲刷也是导致河道淤积形成的主要原因之一。因此加强河流治理,减小河道冲刷,减缓河道淤积,对保证河道畅通及运输安全具有重要意义。
5 结论与展望
无人船测深技术在淮河干流哑巴渡段大断面测量中的应用,有效验证了无人船测量数据的准确性,测量数据误差分析满足相关规定要求,因此无人船测深技术是河道断面测量的一种有效测量方法。无人船测深过程中水下生物环境对测量的影响,使得测量结果存在明显误差测量值,但通过误差分析,剔除粗差点,可有效控制误差处于有效合理范围内。无人船测量技术具有操作简单、快捷、安全、效率高、数据准确度高等优点,在河道测量领域具有较广的应用前景;其测量过程便捷、迅速,通过数据对比分析能够及时把握河道发展趋势,为河道治理的决策提供准确、快捷的数据指导。