考虑部件振动特性的电炉异步电机电气控制方法
2024-04-28武重,卢阳
武 重,卢 阳
(山西安运安环科技有限公司,山西 运城 044000)
随着全球经济的发展和资源能源的日益紧缺,高效节能已经成为各行各业的共同追求。在工业生产中,电炉异步电机是能源消耗的主要来源之一,因此研究电炉异步电机的电气控制方法,可以有效地降低能源消耗,实现高效节能[1-2]。在电力电子技术的推动下变频技术得到了一定程度的提升,被广泛地应用在不同领域中,大功率交流电机的变频技术成为一些学者的研究热点,因此研究电炉异步电机电气控制方法具有重要意义。
陈华斌[3]等将积分器差值和开关自适应增益引入磁通滑膜控制器和转速滑膜控制器中,以此实现电机电气控制,但是该方法的位置跟踪曲线与期望曲线之间具有较大差距,存在位置跟踪误差大的问题。杨淑英[4]等在铁损数学模型的基础上分析电机控制结果与铁损之间存在的关系,根据分析结果建立滑膜控制器,实现异步电机的控制,该方法控制结果的d轴和q轴电压曲线波动较大,表明异步电机发生振动现象,存在控制稳定性差的问题。为了解决上述方法中存在的问题,提出考虑部件振动特性的电炉异步电机电气控制方法。
1 部件振动特性分析与控制指标选取
电机运行的过程中,会由于各种因素的影响而产生部件的振动现象,这些振动会对电机的径向磁拉力产生影响,导致电机的转子磁链电压及电流发生变化,电机出现故障。径向磁拉力是指在电机运行时由于磁场的作用,使得转子受到向轴向拉伸的力。这种力会对电机的振动特性产生一定的影响。具体来说,径向磁拉力的大小与电机的结构参数、磁场分布、气隙大小、转子磁链电压及电流等因素有关,这些因素会影响到电机的振动特性,对此,基于径向磁拉力分析部件振动特性尤为重要。
在通电状态下电炉异步电机会生成气隙磁场,进而产生径向磁拉力,实际磁势曲线的种类较多,难以精准地依靠磁势曲线分析部件振动特性。为了更好地分析磁势曲线的特征,采用谐波分析法[5-6]对其进行处理。该方法可以将磁势曲线分解成多个谐波分量,并分析每个谐波分量的大小和特性,从而更好地了解磁场的性质和变化规律,磁势基波即为分解到的谐波,设计电炉异步电机时会参考基波性质。
叠加的谐波磁场和定子绕组基波组成了电炉异步电机的气隙磁场,径向磁拉力An可通过下式描述:
(1)
式中:ν0为真空磁导率,T·m/A;N1为基波磁场对应的磁密,T;b、a分别为谐波和基波磁场的极对数;ω1为定子基波磁场对应的频率,Hz;φ1为定子基波磁通密度对应的初始相位,rad;Nb为谐波磁场对应的磁密,T;ωb为谐波磁场对应的频率,Hz;φb为谐波磁场磁通密度对应的初始相位,rad。
径向磁拉力可以谐波联合、单独产生,力波的半周期跨距与谐波极对数之间成反比,前者随着后者的减少而增大,电炉异步电机铁芯在此条件下发生变形,两支点之间的距离不断增大,通过上述分析可知,电炉异步电机部件振动受大幅值、低极对数谐波的影响[7-8]。以基波、谐波生成的径向磁拉力为例,展开部件振动分析,上述谐波在气隙磁场中产生的磁动势分别为g1、g2,可通过下述公式计算得到:
(2)
式中:φ1、φ2分别为基波和谐波磁通密度对应的初始相位,rad;I为相电流有效值,A;LM1、LM2分别为上述谐波和基波在电炉异步电机中的绕组系数,N;M为支路匝数,N;ω为相电流在电机中的频率,Hz。
则基波和谐波对应的气隙磁通密度,表达式如下:
(3)
式中:n1、n2分别为基波、谐波对应的气隙磁通密度,T。
在等效气隙的假设条件下,通过下式描述磁动势g(x,t)与气隙磁通密度n(x,t)两者的关系:
n(x,t)=μ(x,t)g(x,t)
(4)
式中:g(x,t)为g1与g2之间的联系;n(x,t)为n1与n2之间的联系;μ(x,t)=ν0/εlg为气隙磁导,T·m/A,其中lg为气隙系数;ε为气隙,m。
电炉异步电机部件振动可由基波生成的磁拉力表示,通过下式计算电炉异步电机在运行过程中产生的径向磁拉力A1:
A1=7 203.8I2[1-cos(4x-2ωt-2φ1)ni]
(5)
式中:i=1,2。分析式(5)可知,当电机转子受到径向磁拉力的作用时,会产生振动,从而引起部件振动。
当径向磁拉力过大时,可能会导致转子磁链电流I增大,以抵消磁拉力产生的作用力。这会使得电机的功率消耗增加,从而降低电机的效率。当径向磁拉力过大时,转子磁链电压U也会随之增加,导致电机的绝缘性能受到损害,影响电机的正常运行。
当径向磁拉力过小时,会导致转子磁链电流I减小,影响电机的输出功率。当径向磁拉力过小时,转子磁链电压U也会随之减小,导致电机无法正常运行,增加轴承和齿轮等机械部件的摩擦损耗,影响电机的寿命。通过以上分析可知,可选取转子磁链电压及电流作为控制指标。
2 转子磁链电压及电流分析
在旋转机械中,部件振动可能导致转子的磁链电压和电流发生变化,从而影响机械的运行状态和性能。因此,基于上述分析的部件振动特性,可以帮助我们更好地了解转子磁链电压和电流的变化规律。转子磁链电压及电流是电炉异步电机运行的重要参数,反映了电机的实际运行状态。通过分析转子磁链电压及电流,可以实时检测电机的运行状态,发现电机故障,并进行相应的控制。
2.1 转子磁链电压计算
通过建立以两相静止坐标系为基准的电炉异步电机电压方程,可以描述电机在运行过程中电压随时间而变化的规律,方程表达式如下:
(6)
式中:urs为转子相在电机运行过程中产生的电压分量,V;Rr、Rs分别为转子相在异步电机中的电阻,Ω;an为极对数,rad;Zr为绕组自感,H;ξ为异步电机转子转速,rad/s;Zm为互感,H。转子磁链方程如下:
Γrs=Zmisβ+Zrirβurs
(7)
式中:isβ为转子电感;H,irβ为转子电阻,Ω。
构建电炉异步电机的电磁转矩方程如下[9-10]:
Ye=anZm(isβ-irβ)Γrs
(8)
转子在电炉异步电机运行状态下的电压计算公式为
U=Zrisq+anΓsq-ξ1ΓsdYe
(9)
式中:U为在d轴中定子产生的电压分量,V;isq为q轴中定子产生的电流分量,A;ξ1=ξ-ξr为转差角速度,rad/s,其中ξr为转子对应的速度,rpm;Γsq为q轴中转子磁链对应的分量,Wb;Γsd为d轴中定子磁链对应的分量,Wb。
2.2 转子磁链电流计算
以两相静止坐标系为基准,通过建立转子磁链方程来描述电炉异步电机中转子磁链随时间的变化规律,方程表达式如下:
Γrβχ=A1(ZmisβU+ZrirβU)
(10)
同理建立,转子在电炉异步电机中的转子磁链电流计算公式为
I=Zmanisβ+Zranirβ+ξr(Zmisβ+Zrirβ)+Γrβχ
(11)
转子磁链电压和电流的分析可以帮助确定电机的负载特性和转速特性,从而选择合适的控制策略和参数,提高电机的效率和稳定性。
3 电炉异步电机电气控制
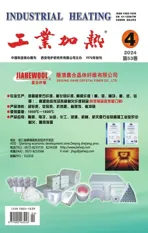
将上述得出的转子磁链电压及电流信息,作为输入信号提供给控制器,将转子磁链电压及电流作为输入信号可以优化电机的转速、转矩和能耗等性能指标,提高电机的效率和稳定性。控制器根据输入信号,结合神经网络算法,可输出精准的控制信号,控制电机的转速和负载特性。传统PID控制器的参数需要手动调整,对于复杂的非线性系统,很难获得最优的参数,神经网络以学习样本数据和自适应调整的方式不断优化控制器的参数,从而提高控制精度和稳定性[11-12]。因此,通过神经元自动调节PID控制器中存在的控制参数,利用优化后的PID控制器实现电炉异步电机电气控制,优化后的PID控制器结构如图1所示。
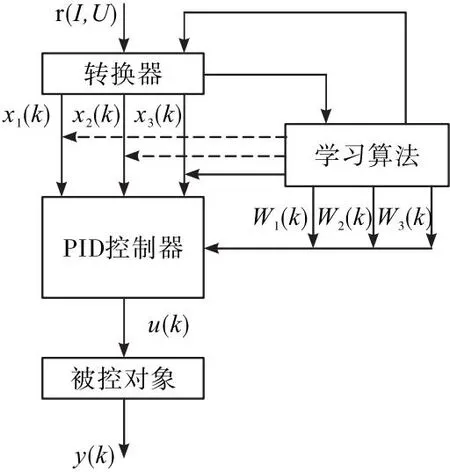
图1 PID控制器
图1中,r(I,U)为电炉异步电机的转子磁链电压及电流;u(k)为PID控制器输出值;y(k)为电炉异步电机的实际输出电流值;Wi(k)为PID控制器权重,i=1,2,3,优化后的PID控制器在电机控制过程中的输入为x1(k)、x2(k)、x3(k)[13-14]:
(12)
式中:k为采样时刻;e(k)为偏差信号。
在Delta学习规则[15]的基础上对权重展开自适应调节,设定学习监督信号ηi(k),表达式为
ηi(k)=e(k)xi(k)
(13)
式中:i=1,2,3,ηi为PID控制器的学习率,ηi>0。若要保证神经元权值满足缓慢衰减的条件,就需要满足学习监督信号ηi(k)与PID控制器权重Wi(k)之间成正比,则Delta学习规则如下:
Wi(k)=wi(k)+ιiηi(k)
(14)
因此经过PID控制器控制的电炉异步电机的实际输出电流值y(k)可通过下式计算得到:
(15)
PID控制器的输出y(k)即为电炉异步电机电源电流,PID控制器通过对电源电流进行调节,实现了对电炉异步电机的转速、扭矩等运行参数的控制,以此抑制电机部件振动,实现电炉异步电机电气控制。
4 实验与分析
4.1 实验准备
为了验证考虑部件振动特性的电炉异步电机电气控制方法的有效性,需要对其展开测试。本次测试所用的异步电机如图2所示。
图2 电炉异步电机电气控制图
该异步电机的具体参数如表1所示。
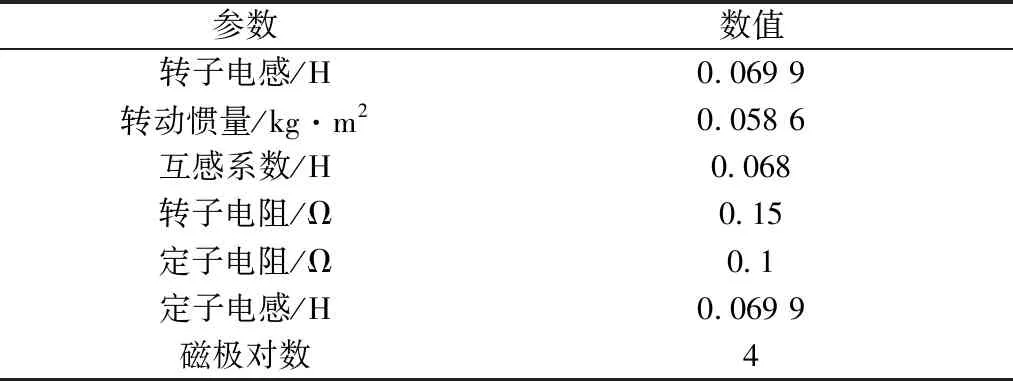
表1 异步电机参数
4.2 电炉异步电机控制误差分析
基于上述实验设置,采用所提方法、文献[3]方法和文献[4]方法对上述电炉异步电机展开控制,控制结果如下图3所示。
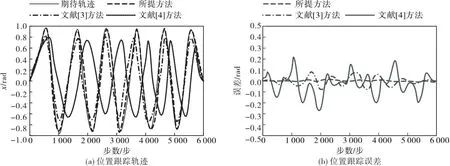
图3 不同方法的位置跟踪结果
分析图3可知,采用所提方法控制电炉异步电机时,位置控制曲线与期望位置曲线基本相符,误差基本为0,而文献[3]方法和文献[4]方法的位置跟踪曲线与期望曲线之间存在较大距离,误差较大。说明所提方法的跟踪精度较高,具有有效性。
4.3 电炉异步电机电压控制分析
所提方法、文献[3]方法和文献[4]方法在控制过程中的q轴电压、d轴电压控制情况如图4所示。

图4 不同方法的电机电压控制结果
分析图4可知,文献[3]方法和文献[4]方法控制电炉异步电机时的q轴电压和d轴电压控制曲线存在一定程度的波动,表明以上两种方法控制电炉异步电机时存在抖动现象,进而导致电压变化波动程度较大。而采用所提方法控制电炉异步电机时,q轴电压和d轴电压的控制曲线较为平稳,表明该方法控制电炉异步电机时没有发生抖动现象,因为所提方法通过分析电炉异步电机的部件振动特性,了解了转子磁链电压和电流的变化规律,并以此为依据进行PID,避免了控制过程中出现部件振动现象,表明在电炉异步电机电气控制过程中,所提方法具有较高的控制精度。
5 结 语
异步电机的综合性能在科学技术飞速发展的推动下得到了很大的改善,被广泛地应用在电炉驱动旋转部件中。但由于异步电机的驱动系统在运行过程中呈现出高度非线性、强耦合和多变量等特点,易导致电炉异步电机出现误差,对此,提出考虑部件振动特性的电炉异步电机电气控制方法,根据径向磁拉力分析电炉异步电机部件的振动特性,并进一步研究转子磁链电压和电流随振动的变化规律,将采集到的转子磁链电压及电流信息作为输入信号提供给控制器,从而实现对电炉异步电机的电气控制。实验结果表明,所提方法有效减小了位置跟踪误差,提高了控制稳定性,为电炉异步电机电气推进技术的发展奠定了基础。