悬停波动对毫米波无人机通信系统QoS的影响研究
2024-04-28马存燕李小亚贺晨
马存燕 李小亚 贺晨

基金项目:国家自然科学基金面上项目(62271392);陕西省国际科技合作计划项目-重点项目(2021KWZ-07);陕西省重点领域科技创新团队(2023-CX-TD-04)
第一作者简介:马存燕(1996-),女,博士研究生。研究方向为无线通信、毫米波无人机通信。
*通信作者:贺晨(1983-),男,博士,教授。研究方向为无线通信、信号处理。
DOI:10.19981/j.CN23-1581/G3.2024.12.021
摘 要:毫米波无人机通信是未来通信中一种很有前途的候选者。然而,悬停无人机的随机波动会影响该通信系统的服务质量,并给毫米波无人机通信的应用带来挑战。该文从无人机位置波动对无人机-用户链路质量的影响的角度出发,研究无人机位置波动对空对地毫米波无人机通信系统QoS的影响。以可靠服务概率及覆盖概率作为评估系统QoS的指标,基于随机几何获得QoS评估指标的表达式并通过蒙特卡洛仿真进行验证。结果显示,QoS随无人机波动强度的增加而降低且存在使QoS最大的最优无人机高度,为毫米波无人机通信网的设计与研究提供参考依据。
关键词:毫米波无人机通信;无人机位置波动;系统服务质量;随机几何;蒙特卡洛仿真
中图分类号:TN928 文献标志码:A 文章编号:2095-2945(2024)12-0096-04
Abstract: Millimeter wave (mmWave) unmanned aerial vehicle (UAV) communication is a promising candidate for future communications. However, the random fluctuations of hovering UAVs will affect the Quality of Service of the system, which brings challenges to the application of mmWave UAV communication. This paper investigates the impact of hovering UAV position fluctuations on the QoS of air-to-ground mmWave UAV communication from the perspective of the effects of UAV position fluctuations on the quality of UAV-user link. We use reliable service probability and coverage probability as indicators for evaluating the QoS. The expression of the QoS evaluation indicators is obtained through stochastic geometry and verified through Monte Carlo simulations. The results show that the QoS decreases with the increase of UAV position fluctuations level, and there is an optimal UAV height that maximizes the QoS, which provides a reference for the future design and research of mmWave UAV networks.
Keywords: mmWave UAV Communications; UAV position fluctuations; Quality of Service(QoS); stochastic geometry; Monte Carlo simulation
與传统基站相比,无人机基站灵活性高且成本较低[1]。这使得无人机成为处理临时和紧急情况下无线覆盖问题的候选技术之一。毫米波被视为无人机的理想载频[2-3]。毫米波无人机通信能够显著提升系统按需覆盖、传输时延等方面的性能。部署无人机基站的关键挑战之一是悬停无人机的位置和方向会因风等因素而随机变化[4-6],这会导致不可靠的通信。毕竟,在考虑无人机随机波动的情况下对该系统的服务质量(Quality of Service,QoS)进行评估显得至关重要。文献[5]通过实验研究了悬停无人机随机波动对毫米波信号的影响。文献[6-7]从理论上研究了无人机方向波动对毫米波链路中断概率的影响[8]。
尽管上述工作为无人机网络提供了重要见解,但主要集中在研究无人机波动引起的天线波束失调对系统性能的影响上。除上述影响外,无人机位置的随机波动会影响毫米波无人机-用户链路的质量,从而影响系统的QoS。具体来说,毫米波链路通常会遭遇静态阻挡、动态阻挡及自阻挡[9],且链路阻挡在很大程度上取决于收发器与障碍物之间的位置。因此,无人机位置的随机波动会使得链路质量更加随机从而影响系统性能[10]。毕竟,分析无人机位置波动对链路质量的影响,进而评估系统的QoS至关重要。
本文从悬停无人机三维位置波动对无人机-用户间链路质量的影响的角度出发,评估了悬停无人机位置波动对空对地毫米波无人机通信系统QoS的影响。具体如下。
1 系统模型
1.1 无人机模型
如图1所示,以(0,0,hR)处的用户作为典型用户来分析系统的QoS。首先,第i架无人机的位置表示为(xi,yi,hi)。然后,基于中心极限定理,无人机位置的随机波动可由高斯分布表示[4,6,11],即,xi、yi、hi都是高斯分布的随机变量,数学表示为
,(1)
式中:(?滋■,?滋■,?滋■)为第i架无人机位置波动的中心值;?滓为无人机位置波动强度。
图1 毫米波无人机通信系统
1.2 链路阻挡及信道模型
定义随机变量B■■={1,0}来表示第i条链路是否会发生静态阻挡,B■■表示为[12]
式中:符号w.p.为对应事件发生的概率;ri=■为用户和无人机间二维距离;?着0=?姿sE(L)E(W);?着=2s(E(L)+E(W))/?仔,?姿s、E(L)、E(W)为建筑物密度、长度、宽度。
定义B■■={1,0}来表示第i条链路是否会发生动态阻挡,B■■可以表示为[9]
式中:?籽=2?姿Bv(hB-hR)/?仔,?姿B、hB、v分别为行人的密度、高度、移动速度;hR为用户的高度;w为固定值,设置为2。
此外,定义Bsef={1,0}来表示任意一条链路是否会发生自阻挡,Bsef表示为[9]
式中:角度为?兹的扇区被定义为自阻挡区域。链路视距(Line-of-Sight,LoS) 通信的概率为
且非视距通信的概率为 。進一步,将信道增益建模为
式中:?茁0为LoS时单位距离处的路径损耗;di=■;?琢和?资为路径损耗的参数。基于此,用户端的信噪比(Signal-to-Noise Ratio,SNR)可以表示为
式中:Pt为发送功率;N0为噪声功率。
2 悬停波动与链路阻挡间的关系
2.1 悬停波动与静态阻挡间的关系
与建筑物尺寸相比,无人机位置波动的尺寸是非常小的,通常为0~0.2 m[13]。因此,本文假定无人机位置波动对链路静态阻挡的影响可忽略不计。
2.2 悬停波动与动态阻挡间的关系
对由移动的行人引起的动态阻挡而言,无人机位置的随机波动会有意义地影响链路的阻挡状态。因此,计算了?准i(hi,ri)的概率密度函数(Probability Density Function,PDF)以评估悬停无人机位置波动对链路动态阻挡的影响,相关计算步骤如下。
1)根据式(1)可知,xi和yi是高斯分布的,因此,ri=■是莱斯分布的。
2)由于无人机与用户的传输距离通常大于无人机的波动强度, 可以被近似成均值为,?滋■=■,方差为?滓2的高斯分布。
3)由于ri和hi都是高斯分布的随机变量,根据高斯分布的性质,?准i(hi,ri)是2个高斯分布的商。毕竟,?准i(hi,ri)也可近似表示为高斯分布[14],其均值和方差表示为
3 悬停波动对系统QoS的影响
3.1 悬停波动对可靠服务概率的影响
定义可靠服务概率为动态阻挡概率不大于给定阈值的概率,数学表示为
式中:?籽th为预定义的阻挡概率阈值。由于?准i(hi,ri)服从均值为?滋■、方差为?滓■■的高斯分布,Prel即为高斯分布的累积分布函数,即
3.2 悬停波动对覆盖概率的影响
定义覆盖概率为用户端SNR不小于给定SNR阈值的概率,数学表示为
式中:?酌0为预定义的SNR阈值。将式(5)—式(7)带入式(11),并进行一系列数学运算,可以得到Pcov的表达式为
式中: ;Q1(a,b)为一阶Marcum Q-function; 。
4 仿真验证
本节通过蒙特卡洛仿真验证了上述理论公式。在模拟中,认为阻挡者均匀分布在半径为100 m的圆形区域,移动阻挡者速度为v=1 m/s,其他仿真参数见表1。
表1 仿真参数设置
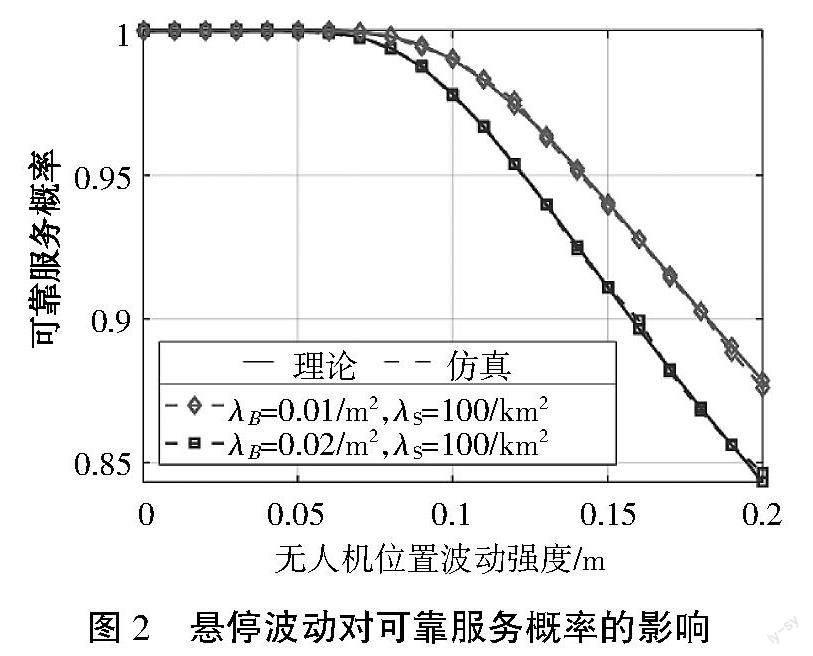
图2显示了无人机位置波动强度?滓对可靠服务概率Prel的影响,其中设定?滋■=25 m,?滋■=10 m,?籽th=0.001。发现?滓越高Prel越低,即系统的QoS越差。然后,在相同的?滓下,发现人类阻挡者密度?姿B越高Prel越小,这是合理的,因为无人机-用户链路上的阻挡者越少,链路发生阻挡的概率就越小,即可靠性越高。而在低?滓区域,即使?姿B不同,Prel的值也基本相同。这是因为此时?准i(hi,ri)的波动较小,即Prel≈1。
图2 悬停波动对可靠服务概率的影响
图3展示了无人机位置波动强度?滓对覆盖概率Pcov的影响,其中设定?滋■=25 m,?滋■=50 m。首先,可以观察到Pcov随?滓的增大而减小。这是因为强烈的无人机位置波动将导致强烈的?酌i的波动,这增加了?酌i低于?酌0的概率。因此,Pcov随?滓的增大而减小。此外,还发现在低?滓区域,Pcov的值几乎不随?滓变化。这是因为此时?滓对?酌i的影响可以忽略不计。因此,?酌i小于?酌0的概率接近0,即Pcov=P(?酌i≥?酌0)≈1。
图3 悬停波动对覆盖概率的影响
图4显示了无人机平均高度?滋■对覆盖概率Pcov的影响,其中?滋■=55 m,?滓=0.2 m可以看到存在使Pcov最大的最优?滋■。这是由两方面因素共同决定的。一方面,当无人机高度较低时,链路的LoS概率较小,NLoS链路中路径损耗的增加会降低Pcov。另一方面,当无人机高度较高时,即使链路是LoS的,用户与无人机间距离的增加也会导致Pcov较低。毕竟,这2种因素使得存在最佳?滋■以最大化Pcov。
圖4 无人机平均高度对覆盖概率的影响
5 结论
本文从无人机位置波动对毫米波链路质量的影响的角度出发,评估了无人机位置波动对空对地毫米波无人机通信系统QoS的影响。本文的研究不仅能够在不同无人机位置波动强度下快速评估系统的QoS,而且找到了使QoS最大的最佳无人机高度,这有助于建立可靠的毫米波无人机通信。
参考文献:
[1] WANG H, ZHAO H, WU W, et al. Deployment algorithms of flying base stations: 5G and beyond with UAVs[J]. IEEE Internet of Things Journal, 2019,6(6):10009-10027.
[2] SHI X, DENG N. Modeling and Analysis of mmWave UAV Swarm Networks: A Stochastic Geometry Approach[J]. IEEE Transactions on Wireless Communications, 2022,21(11):9447-9459.
[3] YI W, LIU Y, DENG Y, et al. Clustered UAV networks with millimeter wave communications: A stochastic geometry view[J]. IEEE Transactions on Communications, 2020,68(7):4342-4357.
[4] NAJAFI M, AJAM H, JAMALI V, et al. Statistical modeling of the FSO fronthaul channel for UAV-based communications[J]. IEEE Transactions on Communications, 2020,68(6):3720-3736.
[5] SANCHEZ S G, MOHANTI S, JAISINGHANI D, et al. Millimeter-wave base stations in the sky: An experimental study of UAV-to-ground communications[J]. IEEE Transactions on Mobile Computing, 2020,21(2):644-662.
[6] DABIRI M T, REZAEE M, YAZDANIAN V, et al. 3D channel characterization and performance analysis of UAV-assisted millimeter wave links[J]. IEEE Transactions on Wireless Communications, 2020,20(1):110-125.
[7] DABIRI M T, SAFI H, PARSAEEFARD S, et al. Analytical channel models for millimeter wave UAV networks under hovering fluctuations[J]. IEEE Transactions on Wireless Communications, 2020,19(4):2868-2883.
[8] WANG W, ZHANG W. Jittering effects analysis and beam training design for UAV millimeter wave communications[J]. IEEE Transactions on Wireless Communications, 2021,21(5):3131-3146.
[9] JAIN I K, KUMAR R, PANWAR S S. The impact of mobile blockers on millimeter wave cellular systems[J]. IEEE Journal on Selected Areas in Communications, 2019,37(4):854-868.
[10] MA C, LI X, XIE X, et al. Effects of Vertical Fluctuations on Air-to-Ground mmWave UAV Communications[J]. IEEE Wireless Communications Letters, 2022,11(12):2497-2501.
[11] WANG J Y, MA Y, LU R R, et al. Hovering UAV-based FSO communications: Channel modelling, performance analysis, and parameter optimization[J]. IEEE Journal on Selected Areas in Communications, 2021,39(10):2946-2959.
[12] BAI T, VAZE R, HEATH R W. Analysis of blockage effects on urban cellular networks[J]. IEEE Transactions on Wireless Communications, 2014,13(9):5070-5083.
[13] DABIRI M T, SADOUGH S M S, KHALIGHI M A. Channel modeling and parameter optimization for hovering UAV-based free-space optical links[J]. IEEE Journal on Selected Areas in Communications, 2018,36(9):2104-2113.
[14] D?魱AZ-FRANC?魪S E, RUBIO F J. On the existence of a normal approximation to the distribution of the ratio of two independent normal random variables[J]. Statistical Papers, 2013,54:309-323.
