电驱式玉米高速作业播种机控制系统设计与试验
2024-04-27蒋振晗王钰旭魏逸飞于艳孙永佳孙宜田
蒋振晗 王钰旭 魏逸飞 于艳 孙永佳 孙宜田
摘要:我国市面上流行的玉米播种机多数采用指夹式排种器和气吸式排种器,依靠地轮传递带动排种器排种,在一定程度上提高播种粒距均匀性,但排种仍然会受到地轮打滑的影响。针对以上问题,设计电驱式玉米高速作业智能播种机控制系统,以STM32F103芯片作为主控器核心,该系统由地轮安装速度传感器测量机具速度,根据智能车载终端设置的作业参数,通过算法计算目标排种电机转速,实现播种株距与机具前进速度实时匹配,采用红外光电式传感器进行实时播种监测。室内试验和田间试验结果表明:该系统转速控制精度高,播种计数和漏播监测精度较高;设置株距为25 cm时,作业速度分别为8 km/h、10 km/h、12 km/h进行3组重复试验,在3种作业速度下,平均合格指数分别为95.18%、94.36%、91.24%;变异系数分别为15.36%、16.83%、18.24%。
关键词:玉米播种机;控制系统;电驱式;高速作业;智能化
中图分类号:S223.2 文献标识码:A 文章编号:2095-5553 (2024) 03-0024-08
Design and experiment of control system of electric drive corn high speed operation seeder
Jiang Zhenhan1, 2, Wang Yuxu2, 3, Wei Yifei2, 3, Yu Yan1, Sun Yongjia2, 3, Sun Yitian2, 3
(1. College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao, 266109, China;2. Shandong Academy of Agricultural Machinery Sciences, Jinan, 250100, China; 3. Huang-huai-hai Key Laboratory of Modern Agricultural Equipment, Ministry of Agriculture and Rural Affairs, Jinan, 250100, China)
Abstract:
Most of the popular corn planters in China use pickup finger seed metering device and air suction seed metering device, depending on the land wheel transmission to drive the seed metering device seeding, which can improve the uniformity of seed spacing to a certain extent, but the seed seeding is still affected by the slip of the ground wheel. In order to solve the above problems, this paper designed the control system of electric drive maize high-speed operation intelligent seeder. STM32F103 chip was used as the core of the master controller. The system measured the speed of the machine and tool by the proximity switch installed by the ground wheel. Infrared photoelectric sensor was used for real-time seeding monitoring. The results of laboratory test and field experiment showed that the system had high precision of speed control, sowing count and missing sowing monitoring. When the plant spacing was set to 25cm, the operation speed was 8km/h, 10km/h and 12km/h, respectively. The average qualified indexes under the three operation speeds were 95.18%, 94.36% and 91.24% respectively. The variation coefficients were 15.36%, 16.83% and 18.24%, respectively.
Keywords:corn seeder; control system; electric driving; high speed operation; intelligentize
0 引言
目前,我國市面上的玉米播种机多数是以地轮驱动的机械式排种器,该机具作业速度普遍在8 km/h以下,作业速度较低,高速作业时地轮出现打滑现象,极大地影响播种粒距的均匀性,无法实现对播种单体的独立控制;市面上的玉米播种机采用气吸式排种器进行取种、充种,排种盘转动依靠地轮传递,一定程度上提高了播种粒距的均匀性,但排种器还是依靠地轮驱动传递动力;而且机械式排种器在一定程度上对玉米种子的尺寸有严格要求[1],通过对比气吸式排种器利用负压吸附取种,对玉米种子的形状无要求,其排种均匀优于前者[2, 3]。
国内现有的播种机作业数据监测设备集成化程度低、精度低、价格贵,此外在机具播种作业时,作业环境是相对封闭的,无法直接发现排种异常等情况。我国在研究玉米精播种机电驱控制系统方面起步晚,随着微控制器技术的发展,推动了农业机械领域向前发展的一大步,同时在电驱播种监控与控制系统方面得到了迅速的发展,取得了一定的进展[49]。He等[10]设计的基于PID算法控制的电驱控制系统,通过整定PID参数,室内实现了在高速作业下,玉米仍具有高播种单粒率,但电驱播种控制系统价格昂贵,以四行玉米播种机为例,一套电驱播种设备成本为1.2万元左右。丁友强等[11]研制的电驱式玉米播种机控制系统,采用GPS测速,主控器采用STM32系列单片机,排种器采用中国农业大学自主研发的气压组合孔式;播种作业前通过采用安卓系统手机终端设置好作业参数,速度接收器采集拖拉机的行进速度,根据采集的速度信息实时控制直流无刷电机输出调节排种器转速,结果表明高速作业下GPS测试更适用。国外研究学者和农机企业对电驱播种系统研究起步比较早,经过几十年的发展,目前电驱播种控制技术和产品配件的制造技术发展成熟,但不适合我国人多地少的农业种植环境且整套监控设备价格更高。
针对上述问题,本文控制器核心采用STM32F103芯片,播种监测传感器采用红外光电式传感器,电驱播种采用PID算法控制,研究设计一种电驱式玉米高速作业智能播种机控制系统,进行室内试验台试验和田间试验验证,为后期电驱式高速作业玉米智能施肥播种机控制技术研究奠定基础。
1 电驱播种控制系统设计
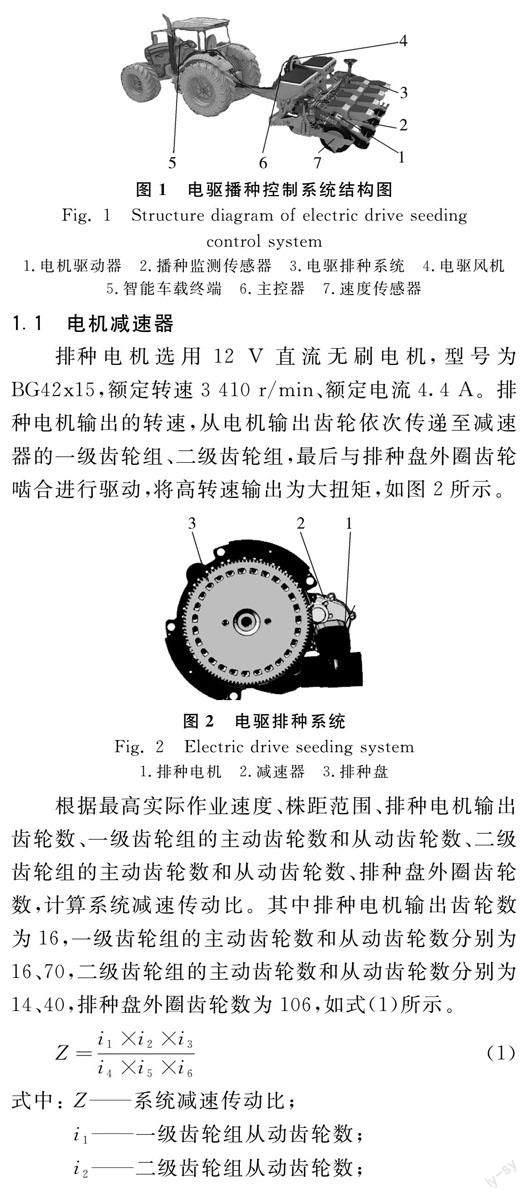
电驱播种控制系统如图1所示,该系统由主控器、智能车载终端、播种监测传感器、速度传感器、电驱排种系统、电机驱动器、电驱风机组成。电驱排种系统包括排种电机、减速器、气吸式排种器。当进行播种作业时,先通过操作安装在拖拉机驾驶室的智能车载终端,设置播种株距、排种盘型孔数、风压值等参数信息,并由CAN总线发送给主控器;当机具开始播种作业时,安装在地轮装一侧的速度传感器检测当前的前进速度,并传递给主控器STM32单片机计算出当前的排种电机转速,由CAN总线传输信号指令给电机驱动器调节排种电机转速,使排种速率与拖拉机前进速度相匹配,实现作业株距与设定株距的一致性;播种监测传感器安装在气吸式排种器出种处的排种管中部,当有种子经过排种管中部时会产生相应的脉冲信号,主控器根据脉冲信号计算播种数量,同时拖拉机驾驶室的智能车载终端实时显示当前播种信息、缺种报警信息及当前作业速度等信息。
1.1 电机减速器
排种电机选用12 V直流无刷电机,型号为BG42x15,额定转速3 410 r/min、额定电流4.4 A。排种电机输出的转速,从电机输出齿轮依次传递至减速器的一级齿轮组、二级齿轮组,最后与排种盘外圈齿轮啮合进行驱动,将高转速输出为大扭矩,如图2所示。
1.排种电机 2.减速器 3.排种盘
根据最高实际作业速度、株距范围、排种电机输出齿轮数、一级齿轮组的主动齿轮数和从动齿轮数、二级齿轮组的主动齿轮数和从动齿轮数、排种盘外圈齿轮数,计算系统减速传动比。其中排种电机输出齿轮数为16,一级齿轮组的主动齿轮数和从动齿轮数分别为16、70,二级齿轮组的主动齿轮数和从动齿轮数分别为14、40,排种盘外圈齿轮数为106,如式(1)所示。
Z=i1×i2×i3i4×i5×i6(1)
式中:Z——系统减速传动比;i1——一级齿轮组从动齿轮数;i2——二级齿轮组从动齿轮数;i3——排种盘外圈齿轮数;i4——排种电机输出齿轮数;i5——一级齿轮组主动齿轮数;i6——二级齿轮组主动齿轮数。
代入以上数据,计算求得系统减速传动比为82.812 5。
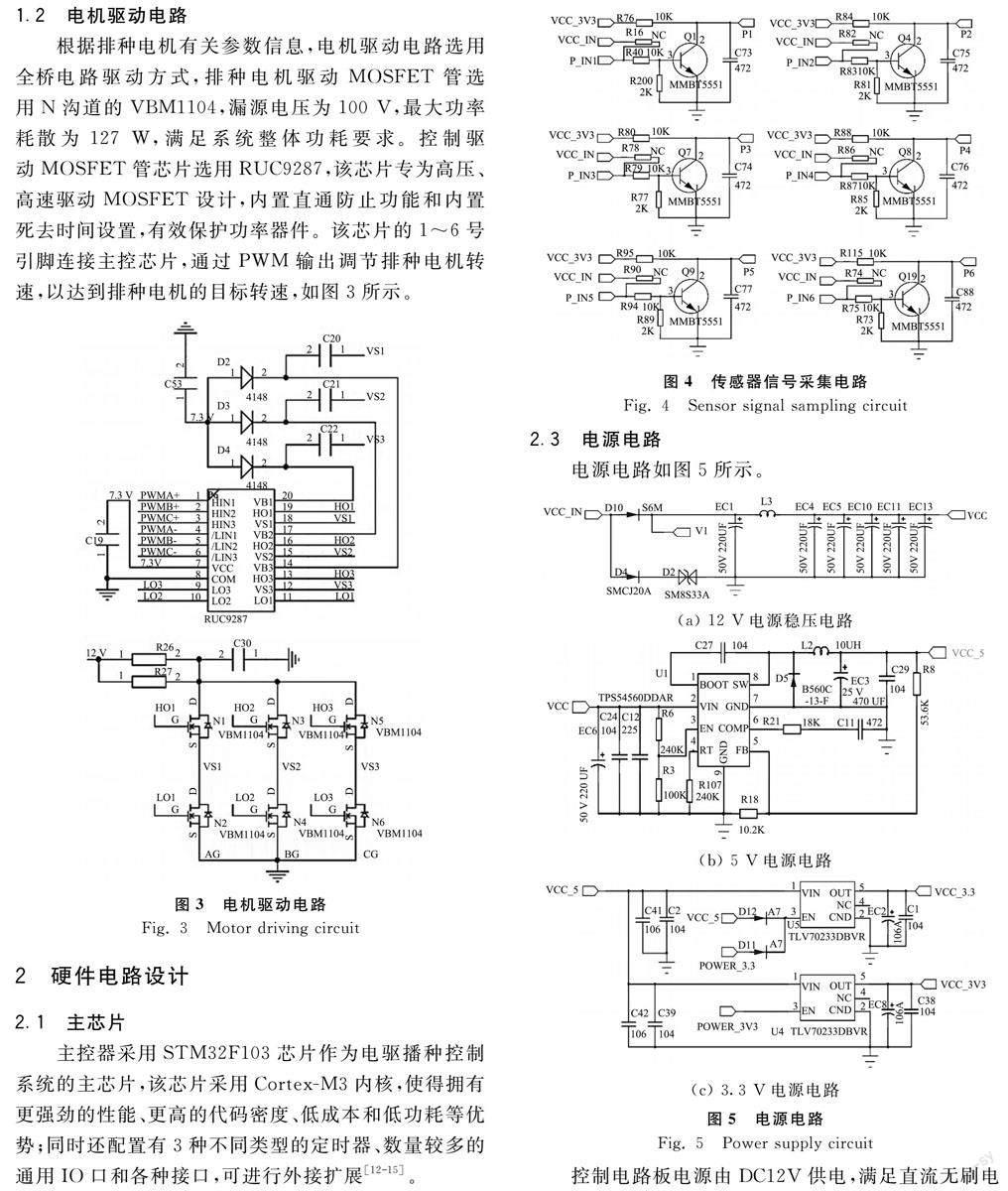
1.2 电机驱动电路
根据排种电机有关参数信息,电机驱动电路选用全桥电路驱动方式,排种电机驱动MOSFET管选用N沟道的VBM1104,漏源电压为100 V,最大功率耗散为127 W,满足系统整体功耗要求。控制驱动MOSFET管芯片选用RUC9287,该芯片专为高压、高速驱动MOSFET设计,内置直通防止功能和内置死去时间设置,有效保护功率器件。该芯片的1~6号引脚连接主控芯片,通过PWM输出调节排种电机转速,以达到排种电机的目标转速,如图3所示。
2 硬件电路设计
2.1 主芯片
主控器采用STM32F103芯片作为电驱播种控制系统的主芯片,该芯片采用Cortex-M3内核,使得拥有更强劲的性能、更高的代码密度、低成本和低功耗等优势;同时还配置有3种不同类型的定时器、数量较多的通用IO口和各种接口,可进行外接扩展[1215]。
2.2 传感器信号采集电路
速度传感器和种子传感器输出信号为脉冲信号,通过设置主芯片内置的通用定时器,选择输入捕获模式采集信号,测量脉冲信号的宽度;采用高压晶体管MMBT5551,对电流进行整流、放大,防止击穿电压损坏主芯片I/O口,如图4所示。
2.3 电源电路
电源电路如图5所示。
控制电路板电源由DC12V供电,满足直流无刷电机驱动和智能车载终端的工作电压,12 V经过稳压电路之后进行两次调压处理,12 V调压至5 V分别为速度传感器、播种监测传感器供电;5 V调压至3.3 V为主控器STM32F103芯片、CAN总线通讯电路、Flash存储电路供电,保证控制电路板各电路之间进行可靠、稳定地运算信息处理。为保护电路中精密元器件正常工作,防止各种浪涌脉冲损坏电路,加入SM8S33A瞬态电压印制二极管TVS保证系统控制电路板电压稳定;TPS54560DDAR稳压芯片和TLV70233DBVR稳压芯片分别进行12DC-5DC和5DC-3.3DC调压处理。
2.4 CAN總线通讯电路
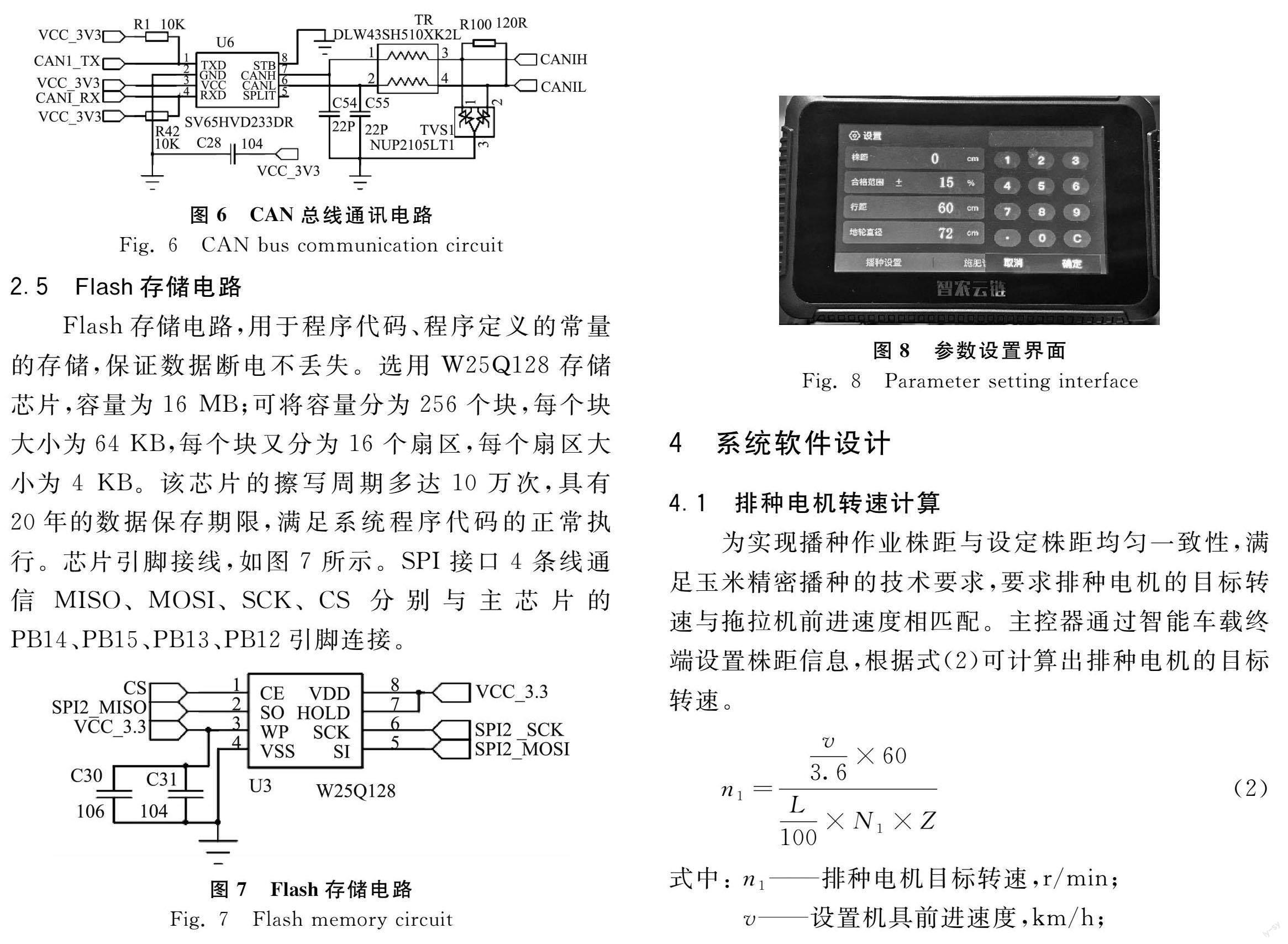
CAN总线是ISO国际标准化的串行通信协议,具有多主控制、系统的柔软性、通信速度较快、错误自检功能等优点[16, 17],能够适应复杂恶劣的田间作业环境,保证主控器与各数据模块之间信息传输的精准性和可靠性。CAN总线收发芯片选用SN65HVD233DR,如图6所示,为保证通讯信号稳定传输,避免产生信号干扰,在电路中加入120 Ω终端电阻[18, 19]。采用CAN扩展帧格式通讯,在保留Cia-301帧ID基础上、扩充两个帧ID实现数据传输,通讯速率采用500 kbps,可以实现系统之间的快速通讯。
2.5 Flash存储电路
Flash存储电路,用于程序代码、程序定义的常量的存储,保证数据断电不丢失。选用W25Q128存储芯片,容量为16 MB;可将容量分为256个块,每个块大小为64 KB,每个块又分为16个扇区,每个扇区大小为4 KB。该芯片的擦写周期多达10万次,具有20年的数据保存期限,满足系统程序代码的正常执行。芯片引脚接线,如图7所示。SPI接口4条线通信MISO、MOSI、SCK、CS分别与主芯片的PB14、PB15、PB13、PB12引脚连接。
3 智能车载终端设计
智能车载终端显示器选用7.0英寸DGUS串口屏,IP65防尘防水,可满足田间恶劣作业环境,高亮度触摸屏,阳光直射下显示界面仍清晰可视。
显示界面用于人机交互,进行播种作业前的作业参数设置;播种作业中,播种量、播种面积、当前作业速度、排种电机状况、声音报警等信息进行实时显示,方便操作人员及时了解作业情况。智能车载终端界面可根据不同行数的玉米播种机进行作业信息的显示,最多可支持8行玉米播种机同时显示播种量信息,当前播种作业完成后,还可对播种量进行清零操作,方便下次进行作业播种量计数。作业参数设置界面可对播种株距、行距、地轮直径、合格范围进行参数设置,点击要设置作业参数对应的显示栏,出现参数设置的方框栏时,可进行参数设置,如图8所示。
智能车载终端设计软件选用DGUS Toolbox软件进行开发。电源状态、网络信号显示、定位显示等显示信息和播种量、已播种面积等作业数据信息显示,通过设置变量地址进行实时显示,变量地址依次从0X1000设置;播种株距、行距、机具参数等作业参数设置和界面中返回、设置、清除等操作按键,变量地址依次从0X2000设置,变量地址写入类型为按字写入变量。
4 系统软件设计
4.1 排种电机转速计算
为实现播种作业株距与设定株距均匀一致性,满足玉米精密播种的技术要求,要求排种电机的目标转速与拖拉机前进速度相匹配。主控器通过智能车载终端设置株距信息,根据式(2)可计算出排种电机的目标转速。
n1=v3.6×60L100×N1×Z(2)
式中:n1——排种电机目标转速,r/min;v——设置机具前进速度,km/h;L——设置株距,cm;N1——排种盘型孔个数,个。
4.2 软件设计流程
电驱播种控制系统选用软件keil Vision 5进行设计开发,软件流程图如图9所示。系统上电之后,检查排种电机上电之后是否存在电机堵转、CAN通讯异常报警等,确保播种作业时电机正常运转。操作人员进行作业参数的设置,开始播种作业,播种监测传感器监测计数。主控器根据设置的作业参数、排种电机转速计算公式及算法,计算出排种电机的目标转速,通过CAN总线通讯传递给电机驱动器调节排种电机转速达到目标转速。智能车载终端界面显示当前的作业信息,系统出现报警时,显示界面显示报警信息和蜂鸣器声音报警提醒操作人员。播种监测传感器将脉冲信号传输给主控器,经过算法处理计算出当前播种量和已播种面积信息,并发送到智能车载终端界面显示。播种作业结束时,作业信息将进行保存上传到云平台。
5 试验验证
5.1 试验台试验
试验台搭建如图10所示,对电驱播种控制系统进行室内试验,验证该系统的性能。排种器选用气吸式排种器,型孔数为27,型孔直径为4.5mm;电驱风机选用XGB-250风机,最大负压为8 kPa。机具前进速度设置为10.8 km/h,在该作业速度下进行试验验证。
5.1.1 转速控制精度与播种计数试验
在机具设置的前进速度下,进行玉米播种计数试验,在智能车载终端作业参数设置界面,依次设置株距20 cm、25 cm、30 cm,进行3组试验。由于排种盘转动到充种区时,排种盘型孔才会吸附种子,所以当排种器排出第1粒种子时,开始试验计时,每组试验时间1 min。最后人工统计实际播种数时,需要减去1粒种子数。
试验方法为:根据在一定时间内机具前进的距离,在已知株距的条件下,计算出理论播种数。理论播种数与实际播种数进行对比,实际播种数与智能车载终端显示播种个数进行对比。试验结果如表1所示,实际播种数偏差不大于0.22%,实际的排种转速较好地达到目标转速,排种电机转速控制精度高,可为后续电驱式高速作业玉米智能施肥播种机控制技术研究奠定基础;实际播种数与显示播种数偏差小于等于1.53%,造成的原因是玉米种子经过播种监测传感器的时间太短或者两粒种子重叠一起经过播种监测传感器。
5.1.2 漏播监测精度与报警试验
在机具设置的前进速度下,进行玉米种子漏播监测精度及报警试验。当连续漏播3粒种子时,系统漏播报警一次,并在智能车载终端界面进行显示。通过人为制造漏播的方式,采用热熔胶随机堵塞排种盘3个连续的型孔,人工观察播种状态。设置株距为25 cm,排种电机工作次数分别为30圈、40圈、50圈,进行3组试验,每组试验重复3次,在排种轴处进行标记,方便统计试验时排种电机工作次数。记录系统漏播报警次数,并与理论报警次数进行对比,記录系统显示漏播数,并与理论漏播数进行对比。
漏播监测精度与报警试验结果如表2所示,系统漏播报警平均准确率为96.59%,说明该系统漏播报警精度高;系统漏播监测精度偏差在6%以内,造成偏差较大的原因是漏播监测程序存在一定误差,导致系统未监测出漏播种子。
5.2 田间试验
将该系统安装到2BM-6型免耕精量播种机上,并在山东省农业机械科学研究院章丘试验田进行田间试验,如图11所示。
在田间试验中,研究不同作业速度对玉米播种性能的影响,作业参数株距设置为25 cm,分别按照8 km/h、10 km/h、12 km/h三种作业速度进行实际作业,重复3次试验。播种作业完成后,通过人工测量的方式,每组随机选择试验田地块进行连续测量200个株距样本,依据GB/T 6973—2005《单粒(精密)播种机试验方法》进行数据处理分析[20],得到合格指数、漏播指数、重播指数、变异系数作为验证该系统的性能指标。
通过表3可知,在相同设置株距的條件下,在作业速为8 km/h时,平均合格指数为95.18%,平均漏播指数为3.17%,平均重播指数为1.69%,平均变异系数为15.36%;在作业速度为10 km/h时,平均合格指数和平均漏播指数分别为94.36%、4.57%,平均重播指数和平均变异系数分别为1.42%、16.83%;在作业速度为12 km/h时,平均合格指数、平均漏播指数、平均重播指数、平均变异系数分别为91.24%、5.63%、1.88%、18.24%。
综上所述,在相同条件下,随着作业速度的提高,合格指数不断降低,漏播指数和变异系数均有所提高,重播指数有所下降。
6 结论
1) 针对目前电驱播种控制系统监测精度低,高速作业时播种质量有所下降,国外电驱播种控制系统价格昂贵,无法适应我国国情的问题,设计的采用STM32F103芯片作为主控芯片的电驱播种控制系统,通过智能车载终端界面设置作业参数,计算排种目标转速,作业过程中地轮速度传感器实时测得机具前进速度,不断调节电机转速达到目标转速,并实时进行播种监测、异常报警,提高了播种效率和株距均匀的一致性。
2) 室内试验台试验和田间试验结果表明,排种电机目标转速控制精度较高,播种监测传感器计数精度在98%以上,系统漏播报警平均准确率为96.59%,系统漏播监测精度在94%以上;当设置相同株距条件下,播种作业以不同的速度,随着作业速度的提高,合格指数不断降低,漏播指数和变异系数均有所提高,重播指数有所下降。
参 考 文 献
[1]张辉, 李树君, 张小超, 等. 变量施肥电液比例控制系统的设计与实现[J]. 农业工程学报, 2010, 26(S2): 218-222.Zhang Hui, Li Shujun, Zhang Xiaochao, et al. Development and performance of electro-hydraulic proportion control system of variable rate fertilizer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(S2): 218-222.
[2]刘佳, 崔涛, 张东兴, 等. 玉米种子分级处理对气力式精量排种器播种效果的影响[J]. 农业工程学报, 2010, 26(9): 109-113.Liu Jia, Cui Tao, Zhang Dongxing, et al. Effects of maize seed grading on sowing quality by pneumatic precision seed-metering device [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(9): 109-113.
[3]Gil E C R. Working quality of spacing drills, effects of sowing speed and type of seed [C]. 1996 International Conference on Agricultural Engineering, 1996: 57-58.
[4]丁至成, 吴建军. 单片机排种均匀度检测系统的研究与试验[J]. 农业工程学报, 1996(2): 120-125.Ding Zhicheng, Wu Jianjun. Experiment and research on the testing system with a monolithic micro-computer for measuring uniformity of feeding [J]. Transactions of the Chinese Society of Agricultural Engineering, 1996(2): 120-125.
[5]苑严伟, 张小超, 吴才聪, 等. 玉米免耕播种施肥机精准作业监控系统[J]. 农业工程学报, 2011, 27(8): 222-226.Yuan Yanwei, Zhang Xiaochao, Wu Caicong, et al. Precision control system of no-till corn planter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(8): 222-226.
[6]冯玉岗, 金诚谦, 袁文胜, 等. 基于卫星测速小麦精量电驱式播种控制系统[J]. 中国农机化学报, 2020, 41(12): 124-130.Feng Yugang, Jin Chengqian, Yuan Wensheng, et al. Research on precision electric seeding control system based on satellite velocity measurement for wheat [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 124-130.
[7]陈书法, 冯博, 芦新春, 等. 智能电控精量播种技术研究现状及展望[J]. 中国农机化学报, 2022, 43(12): 5-12.Chen Shufa, Feng Bo, Lu Xinchun, et al. Research progress and prospect of intelligent electronic control precision seeding technology [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(12): 5-12.
[8]Yang L, He X, Cui T, et al. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter [J]. International Journal of Agricultural & Biological Engineering, 2015(4): 1-9.
[9]彭強吉, 孙宜田, 荐世春, 等. 智能玉米精密播种施肥机的研制[J]. 中国农机化学报, 2016, 37(3): 15-19.Peng Qiangji, Sun Yitian, Jian Shichun, et al. Research on the intelligent corn precise seeding fertilizing machine [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(3): 15-19.
[10]He Xiantao, Ding Youqiang, Zhang Dongxing,et al. Design and evaluation of PID electronic control system for seed meters for maize precision planting [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(17): 28-33.
[11]丁友强, 杨丽, 张东兴, 等. 基于GPS测速的电驱式玉米精量播种机控制系统[J]. 农业机械学报, 2018, 49(8): 42-49.Ding Youqiang, Yang Li, Zhang Dongxing, et al. Control system of motor-driving maize precision planter based on GPS speed measurement [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 42-49.
[12]孙永佳, 沈景新, 窦青青, 等. 基于Cortex-M3的免耕播种机监控系统设计与试验[J]. 农业机械学报, 2018, 49(8): 50-58.Sun Yongjia, Shen Jingxin, Dou Qingqing, et al. Design and test of monitoring system of no-tillage planter based on Cortex-M3 processor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 50-58.
[13]王钰旭, 张仰猛, 张波, 等. 单行精量播种施肥机试验台监控系统设计[J]. 农业装备与车辆工程, 2021, 59(8): 36-41.Wang Yuxu, Zhang Yangmeng, Zhang Bo, et al. Design of monitoring system for single row precision seeding and fertilizing machine test bed [J]. Agricultural Equipment & Vehicle Engineering, 2021, 59(8): 36-41.
[14]孙永佳, 窦青青, 孙宜田, 等. 基于Cortex-M3的丘陵山地拖拉机遥控系统设计[J]. 中国农机化学报, 2020, 41(6): 137-142.Sun Yongjia, Dou Qingqing, Sun Yitian, et al. Design of remote control system in hilly tractor based on Cortex-M3 [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(6): 137-142.
[15]丁友强, 杨丽, 张东兴, 等. 基于GPS测速的电驱式玉米精量播种机控制系统[J]. 农业机械学报, 2018, 49(8): 42-49.Ding Youqiang, Yang Li, Zhang Dongxing, et al. Control system of motor-driving maize precision planter based on GPS speed measurement [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 42-49.
[16]付卫强, 孟志军, 黄文倩, 等. 基于CAN总线的变量施肥控制系统[J]. 农业工程学报, 2008, 24(S2): 127-132.Fu Weiqiang, Meng Zhijun, Huang Wenqian, et al. Variable rate fertilizer control system based on CAN bus [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(S2): 127-132.
[17]温鑫, 王熙. 基于农机CAN总线的OneNet远程监测系统研究[J]. 中国农机化学报, 2022, 43(1): 116-121.Wen Xin, Wang Xi. Research on OneNet remote monitoring system based on CAN bus of agricultural machinery [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(1): 116-121.
[18]孙永佳, 窦青青, 张波, 等. 基于ARM的农机作业信息远程传输系统设计[J]. 中国农机化学报, 2021, 42(6): 124-129.Sun Yongjia, Dou Qingqing, Zhang Bo, et al. Design of agricultural machinery operation information transmission system based on ARM [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 124-129.
[19]高原源, 王秀, 杨硕, 等. 基于CAN总线的播种深度监测评价系统研究[J]. 农业机械学报, 2019, 50(12):23-32.Gao Yuanyuan, Wang Xiu, Yang Shuo, et al. Development of CAN-based sowing depth monitoring and evaluation system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(12): 23-32.
[20]GB/T 6973—2005, 單粒(精密)播种机试验方法[S].
基金项目:山东省重点研发计划(2022SFGC0203、2022CXGC020703)
第一作者:蒋振晗,男,1998年生,山东淄博人,硕士研究生;研究方向为农业装备智能化控制技术。E-mail: jiangzhenhan2128@163.com
通讯作者:孙宜田,男,1980年生,山东滕州人,硕士,正高级工程师;研究方向为农业装备智能化控制技术。E-mail: sytde@163.com
