基于复合神经网络重构对象的永磁同步直线电机变参数型位移速度并行控制
2024-04-25鲍明堃周扬忠
鲍明堃 周扬忠
基于复合神经网络重构对象的永磁同步直线电机变参数型位移速度并行控制
鲍明堃 周扬忠
(福州大学福建省新能源发电与电能变换重点实验室 福州 350116)
针对永磁同步直线伺服电机(PMSLM)传统位移控制算法中控制器系数固定带来的控制精度不足等问题,提出一种基于复合神经网络重构对象的PMSLM变参数型位移速度并行控制策略。首先,利用动子位移、线速度的误差信息设计变参数并行控制器;其次,建立含有控制对象多维信息的复合径向基神经网络观测动子位移,并得到控制对象的偏导信息;再次,基于闭环稳定条件,以周期检索的误差与控制目标的比较结果为基础,构建完整的位移速度并行控制器参数更新策略;最后,实验结果表明,该文所提控制策略能实现不同给定位移的高精度控制,且具有控制不同对象参数的泛用性。
永磁同步直线电机 并行控制 复合径向基神经网络 变参数 更新机制
0 引言
永磁同步直线电机具有高推力密度、高效率、快速控制响应等特点,广泛应用于轨道交通、数控机床、高速物流等领域[1]。然而,在各类应用场合中,由于存在永磁同步直线电机(Permanent Magnet Synchronous Linear Motor, PMSLM)电气或机械参数的变化、非线性摩擦力的干扰等因素,会影响动子位移的高精度响应,从而降低伺服系统的控制性能[2]。因此,稳定、高效的位移控制算法对于提高系统性能具有重要的工程应用价值[3]。
按照位移、速度环相对位置的不同,伺服控制系统可以分为串行系统和并行系统。串行系统作为经典的控制策略已有大量研究,如比例积分微分(Proportion Integration Differentiation, PID)控制[4]、滑模算法[5]等;而并行系统作为新兴的研究方向,近年来也有不少学者提出了相关控制策略。文献[6]利用曲线规划替代自抗扰控制的跟踪微分器,构造了一种位移速度一体化的控制结构,提高了系统的抗扰能力。文献[7]将位移环与速度环进行并联设计,构建二阶自抗扰控制系统,提高了位移控制的抗扰性能及跟踪性能。文献[8]提出了基于动态滑模控制的位移速度控制方法,同时对电机的位移和速度进行控制,有效减少了滑模抖振。除此之外,并行控制在工业上也有应用,如高创伺服驱动器采用一种基于误差信号反馈的并行控制策略,有效提高了伺服系统的控制性能。
然而,不论是串行控制还是并行控制,多数控制器参数需要提前整定,并且一般情况下固定不变,无法对实际的控制效果做出调整[9]。对此,模糊算法[10]、最小二乘算法[11]、神经网络[12-13]等被应用到PMSLM的控制中去,此类方法可以对控制器参数在线更新,保证算法更高效的控制。其中,径向基神经网络(Radial Basis Function-Neural Network, RBF-NN)由于具有良好的非线性逼近能力与自修正机制[14],常常与各类控制算法相结合应用,现有的研究主要针对网络观测和参数更新两个环节进行改进。在网络观测环节,文献[15]将改进粒子群算法与RBF-NN相结合,通过改善网络的观测效果来提高系统响应速度。文献[16]用混沌遗传算法来优化RBF-NN参数,增强网络对不确定因素的适应性,但引入更复杂的寻优过程使得处理器的运算压力显著增加。在系数更新环节,文献[17]在PID的基础上引入RBF-NN,利用梯度下降法进行控制器参数的在线调整,有效提高了伺服系统的动态性能。文献[18]在文献[17]的基础上提出基于事件触发的控制器更新机制,降低执行器损耗,但该方法在给定信号变化的情况下无法完成工作。
根据以上分析,本文提出了一种基于复合神经网络重构对象的PMSLM变参数型位移速度并行控制(Variable Parameter-Parallel Control, VP-PC)策略,利用神经网络的映射特性观测动子位移,结合参数更新机制,可以实时调整并行控制器的参数,实现高精度的动子位移控制。
1 基于复合神经网络重构对象的PMSLM变参数型位移速度并行控制策略
1.1 PMSLM数学模型
在PMSLM动子磁场定向的两相旋转dq坐标系中,动子绕组电压平衡方程式为


控制PMSLM动子运动的电磁推力可表示为

式中,e为动子电磁推力;p为电机极对数。
1.2 PMSLM位移速度并行控制策略
PMSLM动子运动过程中,定义位移误差e和线速度误差e如下
式中,*、*分别为位移和线速度的给定。
利用式(3)所示的误差信号设计并行控制器(Parallel Controller, PC),其中位移环采用比例-积分控制器,保证位移控制精度;速度环采用比例-微分控制器,改善速度控制动态性能,进而提升位移控制效果,控制律为

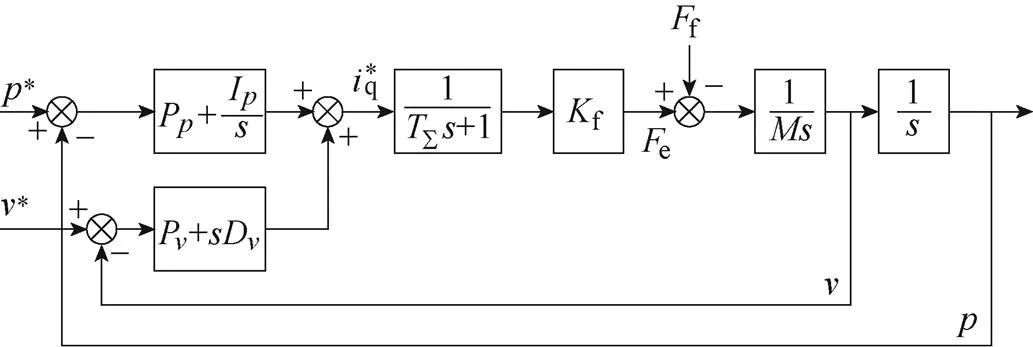
图1 位移速度并行控制结构
图1的并行控制系统位移传递函数推导为

根据劳斯判据可得上述系统稳定的充要条件为

图2为控制器各参数对系统带宽的影响,可见P、D对并行系统的带宽有较为显著的影响。
1.3 PMSLM位移速度并行控制策略


图3 PMSLM变参数型位移速度并行控制策略框图

式中,“”为变量第时刻的值。


1.4 复合神经网络重构对象
1.4.1 复合神经网络结构

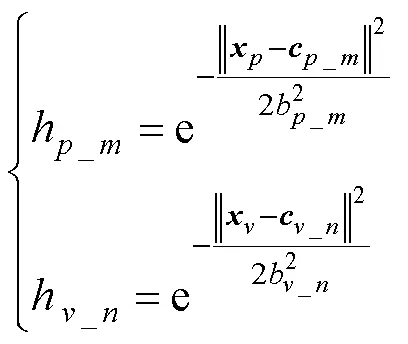
由图1和图3可见,影响动子位移的不仅有q轴电流产生的电磁推力,还有外在的负载阻力,但负载阻力无法准确获知,为此,本文提出以动子位移、速度为输入层,观测位移为输出层的复合径向基神经网络(Composite Radial Basis Function- Neural Network, CRBF-NN),具体讲解如下。
CRBF-NN主要由双输入层、双映射层、组合层、输出层四个部分组成:
(2)双映射层包含位移映射层和速度映射层,分别由和个神经元组成。
(3)组合层由×个节点构成,由位移和速度映射神经元输出加权求和产生。
(4)输出层对各组合节点的加权结果进行相加得到最终的观测位移。对应网络的具体结构如图4所示。

图4 CRBF-NN结构
相较于传统的RBF-NN,CRBF-NN额外引入了速度子网络,利用控制对象更多的输出信息,能够有效提升观测性能。
1.4.2 复合神经网络双映射层设计
双映射层的神经元数量影响整个网络的性能,过多的神经元会增加处理器的运算压力,同时给网络修正造成一定的困难;神经元数量较少则对输入信息的映射能力不足,造成观测性能下降。本文采用均值聚类算法[19]分别对位移映射层和速度映射层进行分析,借助最佳聚类结果选择映射层神经元数量。以位移映射层为例,算法具体步骤如下:


(4)对于每个样本点,将其归类到最小欧式距离所对应的位移类中,得到分类结果。
(5)计算各位移类内的样本均值,作为该类的新类心,并重复步骤(3)~步骤(5)直到各类心不再发生变化。
(6)选择下一个聚类数n(t+1),重复步骤(3)~步骤(6)。
(7)所有聚类数情况迭代完毕,根据式(12)计算各聚类数对应的截维斯-博尔丁(Davies- Bouldin, DB)和卡林斯基-哈拉巴斯(Calinski- Harabaz, CH)指标。
式中,dot、dou分别为第t位移类内样本点散度、第u位移类与第t位移类间样本点散度;dotu为t、u两个位移类心的距离;Ptu、Pt分别为位移类间、类内协方差矩阵。算法具体流程如图5所示。
1.4.3 复合神经网络双映射层设计
定义CRBF-NN各权值修正过程为


在式(14)的基础上,采用梯度下降法求得式(15)~式(17)对应的各权值修正量。
1)加权权值

2)映射函数宽度

3)映射函数中心




1.5 完整的位移速度并行控制器参数更新策略
根据式(8)可知,PMSLM控制过程中若存在位移误差e,则系数更新过程会频繁进行。但工程应用中,除了控制算法自身的滞后特性,各种软硬件层面上的因素,都会使得动子实际位移无法完全跟随给定,即使系统稳定之后,e也不恒为0。对此本文提出一种基于闭环稳定和误差检索的并行控制器参数更新策略,能够在满足控制性能目标的同时有效减少PC参数更新次数,从而降低运算器资源占用。算法具体步骤如下:

(3)若周期检索完成,则执行步骤(4);否则,返回执行步骤(2)。
(4)将M与误差阈值T相比较,若M>T,则执行步骤(5);否则,执行步骤(7)。
(5)判断PC各项系数是否满足式(6)的闭环稳定条件,若满足,则执行步骤(6);否则,执行步骤(7)。
(6)根据式(8)进行PC各系数的在线更新。
(7)最大误差绝对值小于阈值,或PC各系数更新过程中达到闭环稳定条件边界,停止系数更新。
完整的位移速度并行控制器参数更新策略具体流程如图6所示。
2 仿真证明
为验证本文所提的变参数型位移速度并行控制策略的性能,利用Matlab/Simulink软件对图3所示的并行控制系统进行仿真建模。为了便于算法验证,采用式(19)和式(20)所示误差方均根、误差最大绝对值两项指标进行分析。

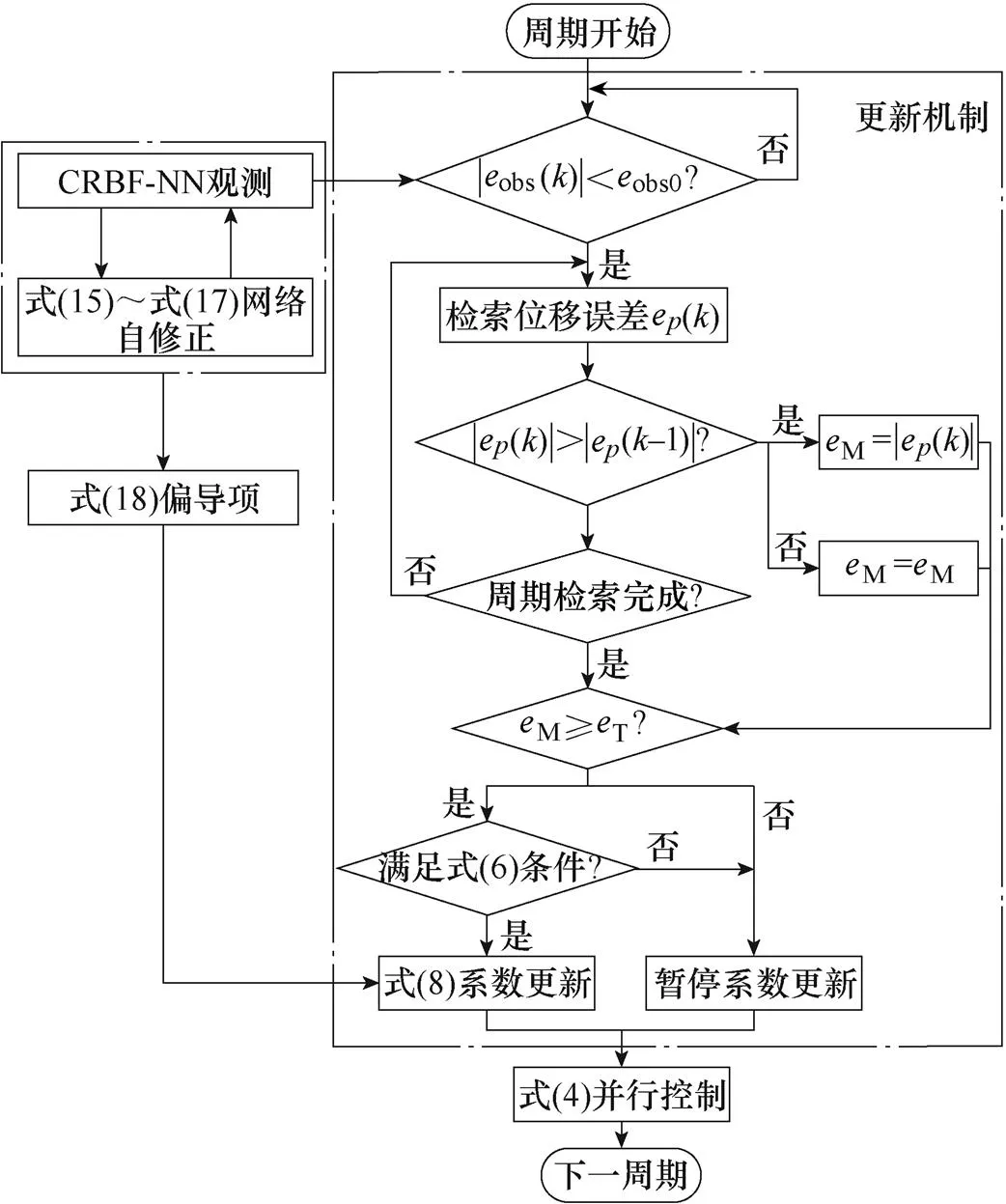
图6 并行控制器参数更新流程
仿真中对比PID(方法A)、PC(方法B)、VP-PC (方法C)三者的控制效果。正弦位移实仿真如图7所示。图7a为动子运动给定的正弦位置信号以及三种方法的误差波形。设定验证的控制目标为0.10 mm,从图7b~图7g可见。
(1)图7b中,上图为误差尖峰处波形,下图为常态误差波形。可见三种方法中,采用VP-PC算法的控制系统,位置控制误差明显小于其他两种方法,且满足设定要求。
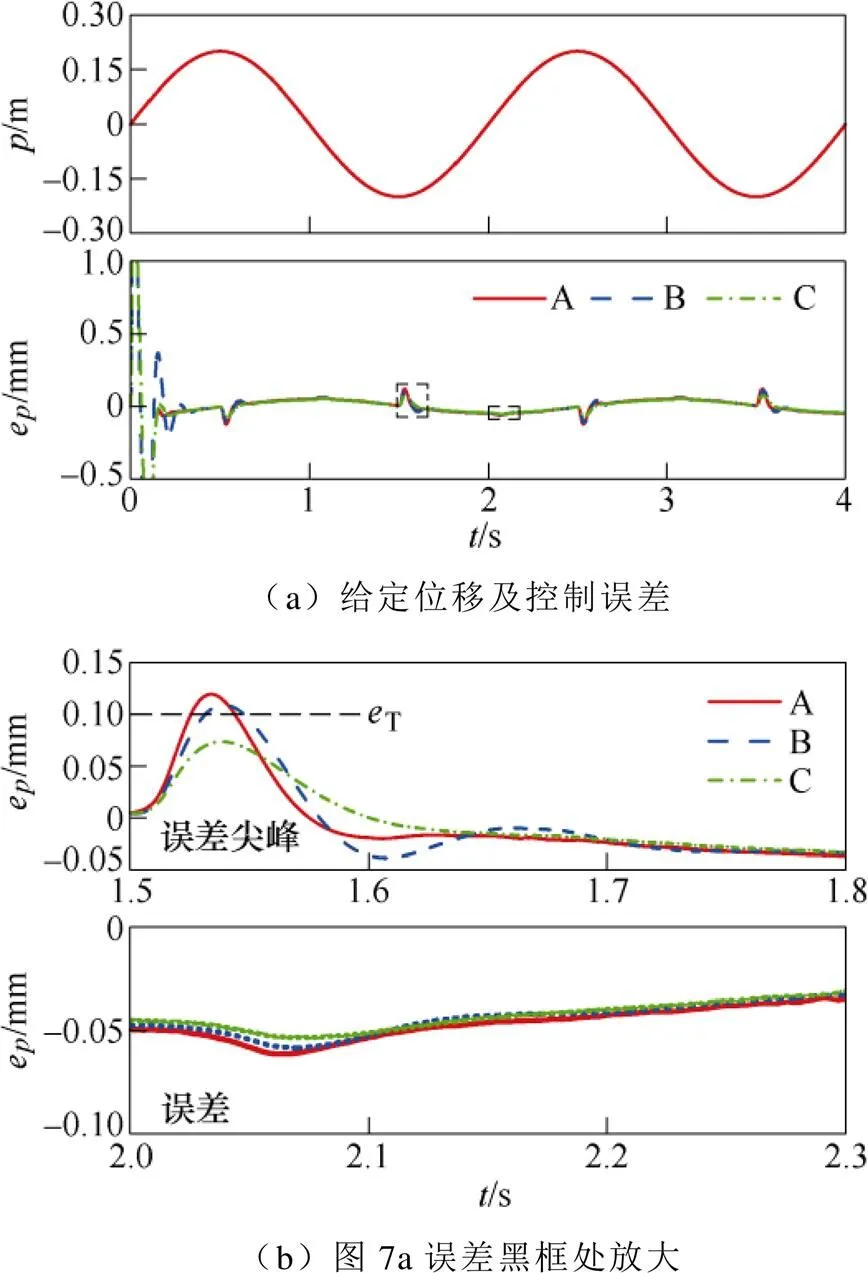
(2)图7c中,PID的SD、AME分别为0.041 mm、0.124 mm,而PC的SD、AME分别为0.039 mm、0.112 mm,较前者有所改善。在此基础上加入CRBF- NN之后,两项指标均进一步减小,分别为0.035 mm、0.077 mm。
(3)图7d为VP-PC参数更新的波形。可见各参数均在=0.2 s左右更新完毕,即此时系统的控制误差已满足控制目标要求。
(4)图7e~图7f展示的是三种方法的速度控制对比,可见采用VP-PC算法控制系统的速度误差指标SD、AME明显小于其他两种方法。
(5)图7g为CRBF-NN的位移观测和偏导输出,可见控制过程中网络具有快速、高精度的观测性能。
3 实验分析
为分析本文所提算法的有效性,采用以TMS320F28388D为核心的实验平台进行研究,实验中所用电机和硬件平台如图8所示,其中PMLSM标称参数见表1,系统控制周期为125ms。
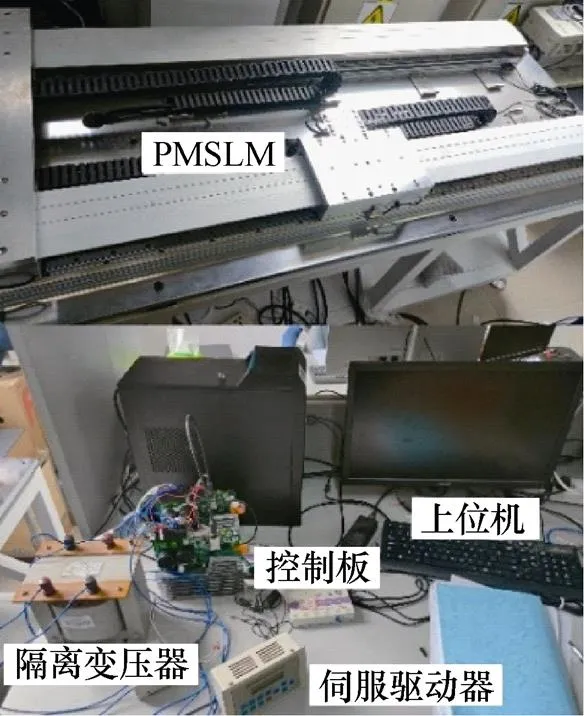
图8 实验平台实物
表1 PMSLM标称参数

Tab.1 PMSLM nominal parameters
3.1 CRBF-NN映射层设计
图9为位移和速度映射的聚类指标结果。

图9 不同聚类数指标对比
从图9中可以看出:
(1)位移映射实验中,当聚类数为3时DB最小,为0.765 7;同时此聚类数对应的CH最大,为16 691。
(2)速度映射实验中,当聚类数为2时DB最小,为0.507 4;当聚类数为6时CH最大,为36 453。
综合考虑双指标性能和网络结构的复杂程度,最终选择位移映射层神经元数量为3,速度映射层神经元数量为2。
3.2 CRBF-NN观测性能分析
相较于CRBF-NN,传统的RBF-NN只利用控制对象的单一输出构建输入层,对系统的信息利用不足。此外,对RBF-NN观测效果的改进主要通过增加映射层神经元数量或在自修正的过程中引入动量因子[20-21]。实验中,同样采用式(19)、式(20)所示的两项指标分别对RBF-NN(只有CRBF-NN位移输入层部分,无组合层,输入、映射、输出的节点数量分别为3、3、1)、RBF-NN(增加2个映射神经元)、RBF-NN(引入动量因子)、CRBF-NN的位移观测性能进行比对。
图10为四种观测网络的性能指标对比,图11为四种网络观测时间对比。实验中各观测网络除结构有所差异,其余参数均保持一致,从图中可以看出:

图10 网络观测性能指标
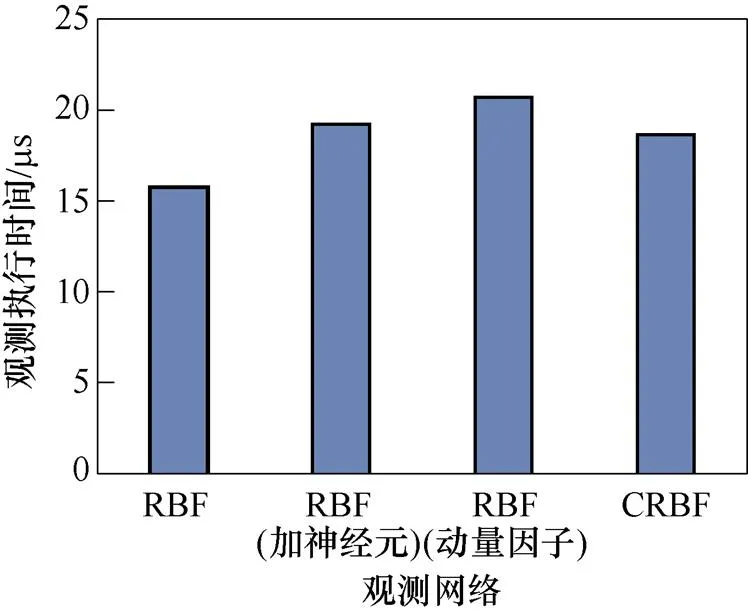
图11 网络观测时间对比
(1)RBF观测所需时间最短为15.75ms,但观测效果最差,SD=0.488 mm,AME=1.983 mm。
(2)RBF经过增加映射层神经元数量或引入动量因子后,网络观测效果有所改善,SD各减少至0.280 mm、0.281 mm,AME分别减少至1.502 mm、1.381 mm,但二者观测时间分别增至19.22ms、20.72ms。
(3)CRBF-NN复合结构有效改善网络观测性能,SD=0.063 mm,AME=0.25 mm,观测时间为18.63ms。
实验结果验证了本文所提CRBF-NN结构比RBF-NN结构具有更优的观测效果;并且对比传统RBF-NN结构的改进方法,也能更高效地观测动子位移,同时带给处理器额外的运算压力也更小。
3.3 不同位移控制性能分析
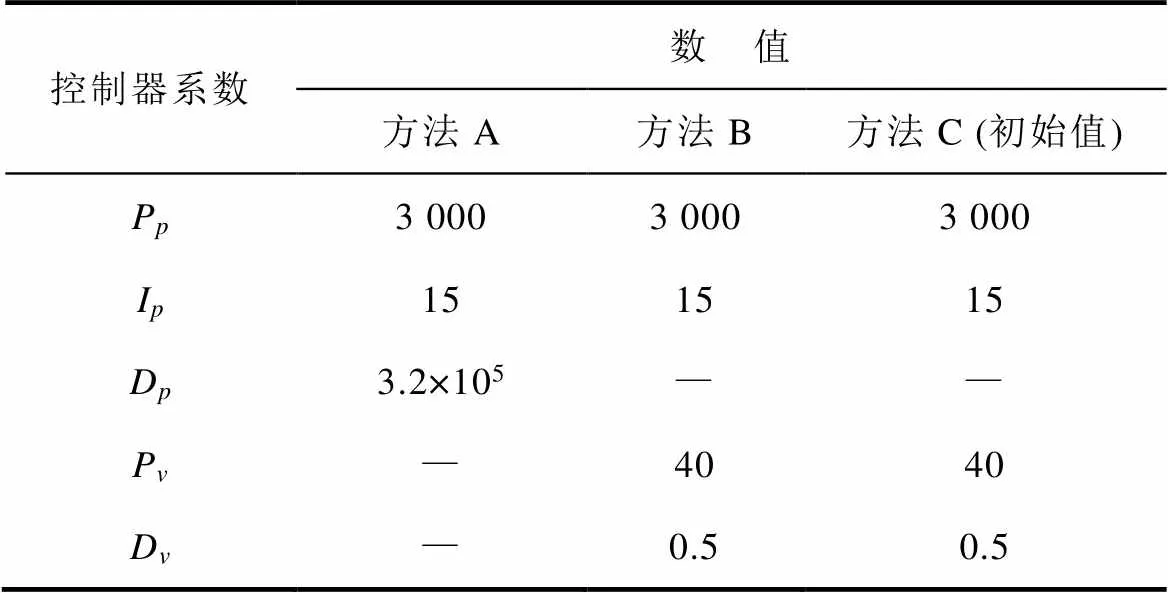
实验中给予动子不同形式的位移信号,并采用式(19)、式(20)指标进行分析。各方法系数见表2。
表2 三种控制方法参数
Tab.2 The coefficients of three control methods
注:D为位移环PID的微分系数,已进行换算。
3.3.1 正弦位移实验分析
正弦位移实验如图12所示。图12a为动子运动给定的正弦位移信号以及三种方法的控制误差波形。正弦位移下设定验证控制目标为T=0.06 mm。从图12b~图12g可以看出:
(1)图12b中,上图为误差尖峰处波形,下图为常态误差波形。可见三种方法中,采用VP-PC算法的控制系统,位移控制误差明显小于其他两种方法,且满足设定要求M≤T。
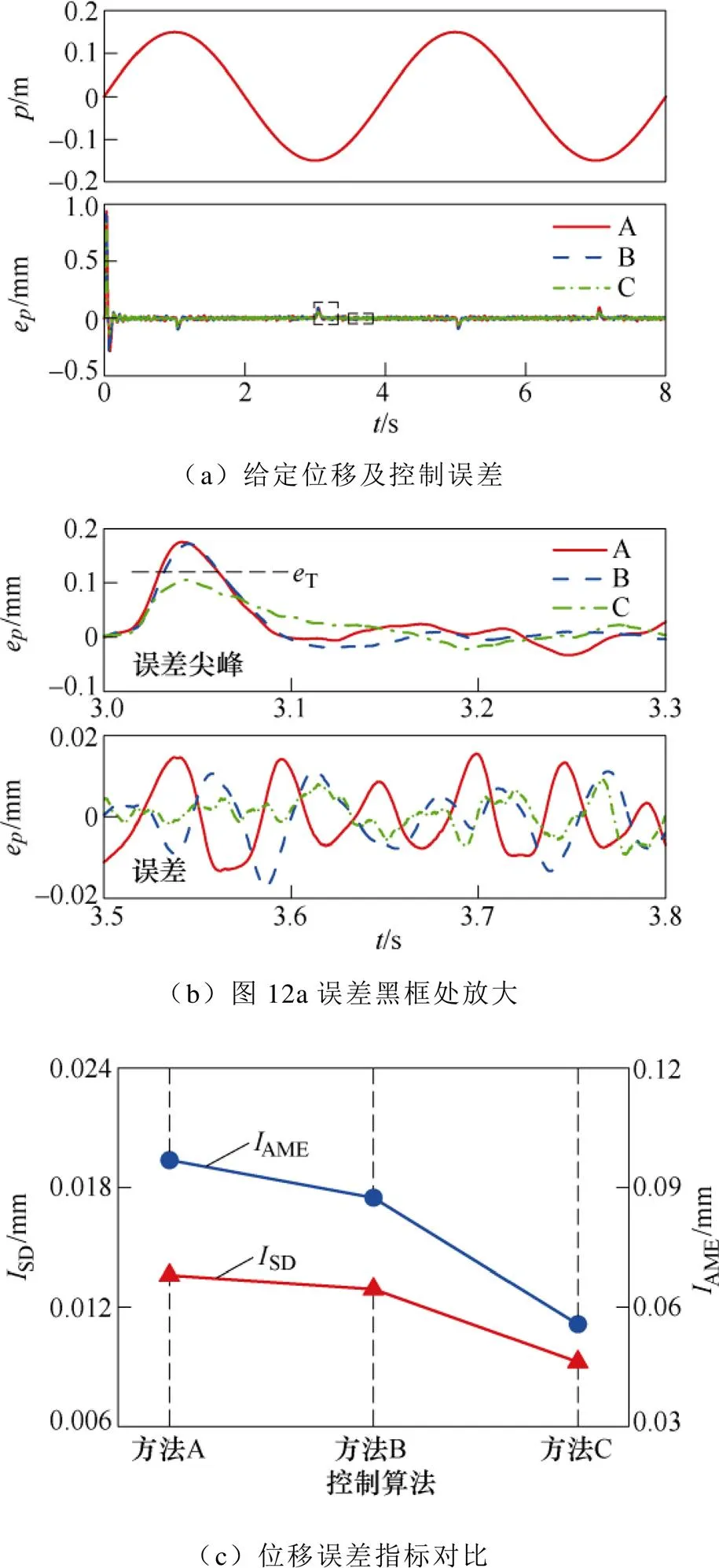
(2)图12c中,PID的SD、AME分别为0.014 mm、0.097 mm,而PC的SD、AME分别为0.013 mm、0.087 mm,较前者有所改善。在此基础上加入CRBF-NN之后,两项指标均进一步减小,分别为0.009 mm、0.056 mm。
(3)图12d为VP-PC参数更新的波形。可见控制器各参数在=1.8 s左右更新完毕,即此时系统的控制误差已满足控制目标要求。
(4)图12e、图12f展示的是三种方法的速度控制对比,可见采用VP-PC算法控制系统的速度误差指标SD、AME明显小于其他两种方法。
(5)图12g为CRBF-NN的位移观测和偏导输出,可见控制过程中网络具有快速、高精度的观测性能。
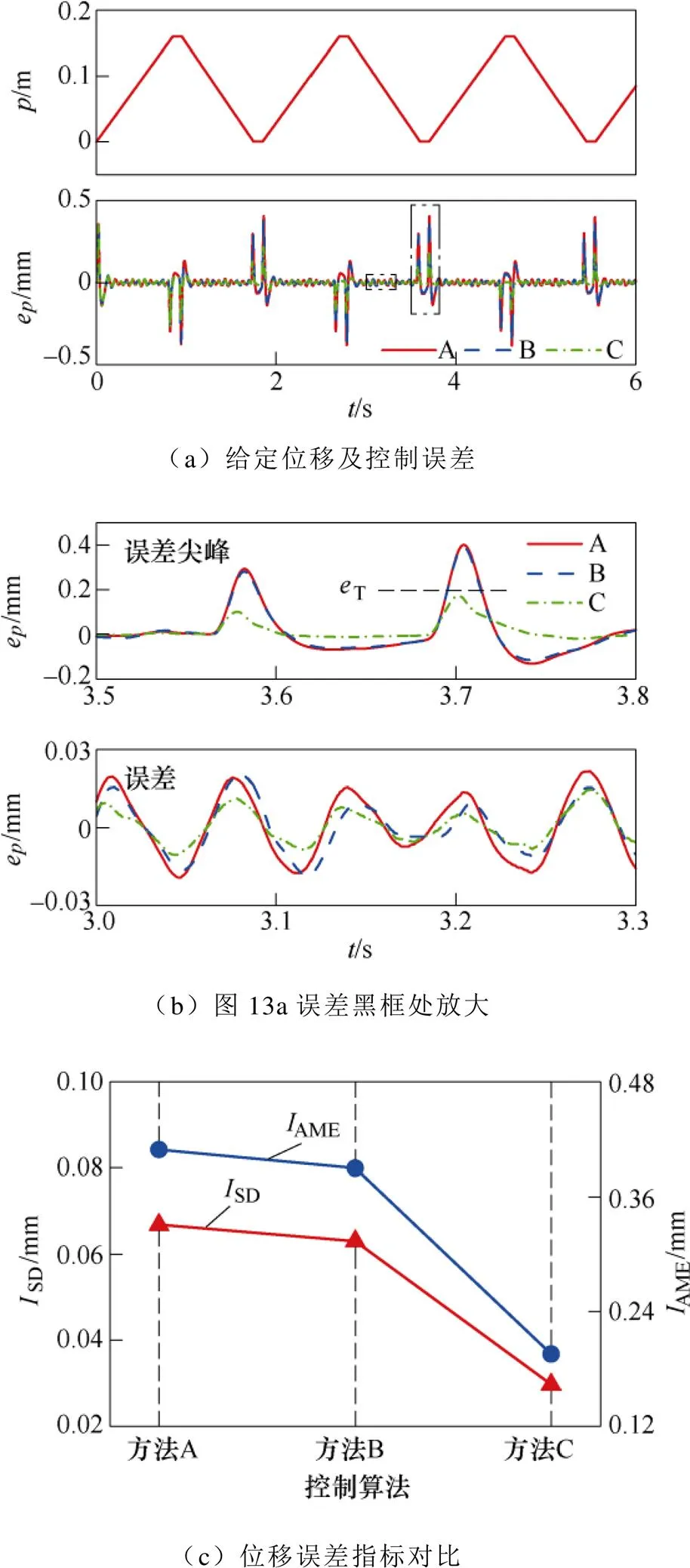
3.3.2 梯形位移实验分析
梯形位移实验如图13所示。图13a为动子运动给定的梯形位移信号以及三种方法的控制误差波形。该位移下设定的控制目标T=0.2 mm。从图13b~图13g可以看出:
(1)图13b中,上图为误差尖峰处波形,下图为常态误差波形。可见三种方法中,采用VP-PC算法的控制系统,位移控制误差明显小于其他两种方法,且满足设定要求M≤T。
(2)图13c中,PID的SD、AME分别为0.067 mm、0.410 mm,而PC的SD、AME分别为0.063 mm、0.391 mm,较前者有所改善。而VP-PC算法的两项指标均进一步减小,分别为0.030 mm、0.194 mm。
(3)图13d为VP-PC的参数更新波形。可见控制器各参数在=2.4 s左右更新完毕,即此时系统的控制误差已满足控制目标要求。
(4)图13e、图13f展示的是三种方法的速度控制对比,可见采用VP-PC算法的控制系统,速度误差指标SD、AME明显小于其他两种方法。
(5)图13g为CRBF-NN的位移观测和偏导输出,可见控制过程中网络具有快速、高精度的观测性能。
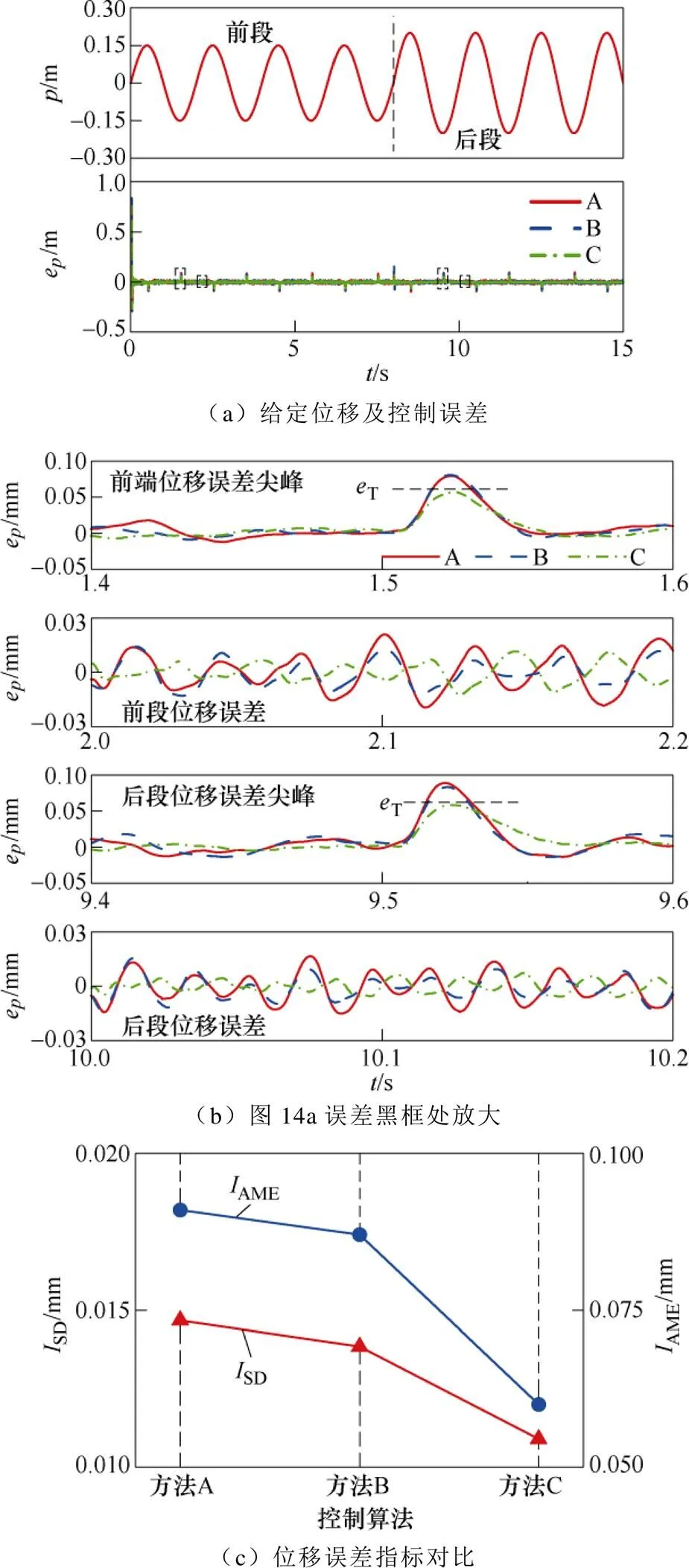
3.3.3 变位移实验分析
变位移实验如图14所示。图14a为动子给定的变位移信号以及三种方法控制误差波形,验证伺服控制中位置突变时不同算法的控制性能。从图14b~图14g可以看出:
(1)图14b中,VP-PC控制下的误差较PID和PC更小,且满足设定要求M≤T。
(2)图14c中,PID的SD、AME分别为0.014 mm、0.091 mm,而PC的SD、AME分别为0.014 mm、0.087 mm。而VP-PC算法的两项指标均进一步减小,分别为0.011 mm、0.059 mm。
(3)图14d为VP-PC的参数更新波形。在前段位移阶段,控制器各项参数在=1 s左右更新完毕;而在圈1处,由于更新机制检测到周期内的某个时刻误差尖峰振荡略微超过T,故控制器参数继续进行小幅度更新。在后段位移阶段,圈2处由于位移给定发生突变,相应产生的误差尖峰明显超过T,故控制器参数继续进行较大幅度更新,约0.5 s完成。
(4)图14e、图14f展示的是三种方法的速度控制对比,可见采用VP-PC算法控制系统的速度误差指标SD、AME明显小于其他两种方法。
(5)图14g为CRBF-NN的位移观测和偏导输出,可见控制过程中网络具有快速、高精度的观测性能。
3.4 不同对象参数控制性能分析
实验中,通过改变动子质量参数(3、8、13 kg)来验证VP-PC控制不同对象时的算法有效性。
位移信号给定与图12a一致,图15a~图15f所示的是不同质量动子的位移控制实验波形。从图中可以看出:
(1)图15a中,在三种不同质量动子的位移控制实验中,均能满足设定要求M≤T=0.06 mm。
(2)图15b中,不同对象参数的SD分别为0.010、0.012、0.015 mm;AME分别为0.057、0.059、0.060 mm,可见三种对象参数的两项指标之间相差不大,算法稳定。
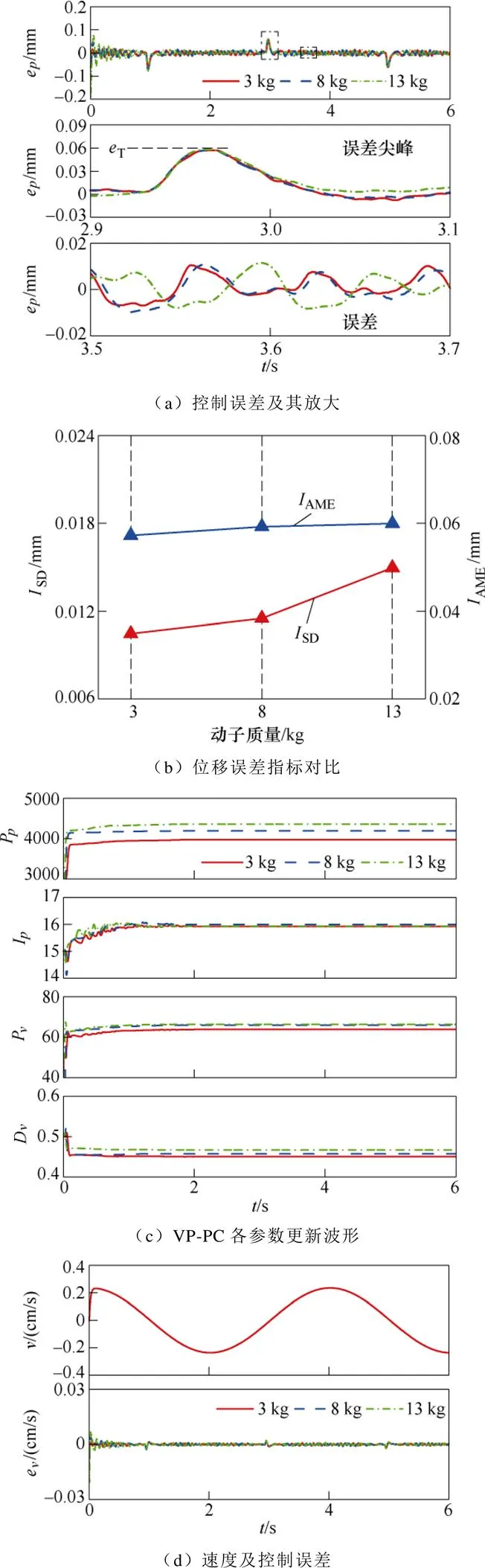
(3)图15c为VP-PC的参数更新波形,均在2 s左右调整完毕,可见算法具有一定泛用性。
(4)图15d、图15e展示的是三种不同动子质量的速度控制误差对比,可见VP-PC算法在速度控制上具有良好的稳定性。
(5)图15f为CRBF-NN的位移观测和偏导输出,可见控制过程中网络具有快速、高精度的观测性能。
4 结论
本文提出一种基于复合神经网络重构对象的永磁同步直线伺服电机变参数型位移速度并行控制策略,理论分析和实验结果表明:
1)本文提出的CRBF-NN结构相较于传统的RBF-NN具有更好的观测性能;相较于传统的改进方法,在带给处理器更小的运算压力前提下,也能有更好的改善效果。
2)本文所构建的VP-PC策略相比于定系数算法如PID,能有效改善动子位移的控制性能。
3)本文所提的VP-PC策略在不同位移给定、控制不同对象参数的情况下均能够保证高精度的控制效果,具有一定的泛用性。
[1] 武志涛, 李帅, 程万胜. 基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制[J]. 电工技术学报, 2022, 37(10): 2503-2512.
Wu Zhitao, Li Shuai, Cheng Wansheng. Fixed- structure sliding mode position tracking control for permanent magnet linear synchronous motor based on extended sliding mode disturbance observer[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2503-2512.
[2] Birbilen U, Lazoglu I. Design and analysis of a novel miniature tubular linear actuator[J]. IEEE Transa- ctions on Magnetics, 2018, 54(4): 1-6.
[3] Wang Ze, Hu Chuxiong, Zhu Yu, et al. Newton-ILC contouring error estimation and coordinated motion control for precision multiaxis systems with com- parative experiments[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1470-1480.
[4] Liu Yachao, Gao Jian, Zhong Yongbin, et al. Extended state observer-based IMC-PID tracking control of PMLSM servo systems[J]. IEEE Access, 2021, 9: 49036-49046.
[5] 付培华, 陈振, 丛炳龙, 等. 基于反步自适应滑模控制的永磁同步电机位置伺服系统[J]. 电工技术学报, 2013, 28(9): 288-293, 301.
Fu Peihua, Chen Zhen, Cong Binglong, et al. A position servo system of permanent magnet syn- chronous motor based on back-stepping adaptive sliding mode control[J]. Transactions of China Electrotechnical Society, 2013, 28(9): 288-293, 301.
[6] 邵佳威, 蒋全, 倪燕青, 等. 基于改进自抗扰控制的永磁同步电机位置控制策略[J]. 控制工程, 2022, 29(8): 1487-1496.
Shao Jiawei, Jiang Quan, Ni Yanqing, et al. Position control strategy of permanent magnet synchronous motor based on improved active disturbance rejection control[J]. Control Engineering of China, 2022, 29(8): 1487-1496.
[7] 董顶峰, 黄文新, 卜飞飞, 等. 圆筒型反向式横向磁通直线电机定位力补偿二阶自抗扰控制器位置控制[J]. 电工技术学报, 2021, 36(11): 2365-2373.
Dong Dingfeng, Huang Wenxin, Bu Feifei, et al. Second-order ADRC position control with detent force compensation for tubular reversal transverse flux linear machine[J]. Transactions of China Electrotechnical Society, 2021, 36(11): 2365-2373.
[8] 许叙遥, 林辉. 基于动态滑模控制的永磁同步电机位置速度一体化设计[J]. 电工技术学报, 2014, 29(5): 77-83.
Xu Xuyao, Lin Hui. Integrated design for permanent magnet synchronous motor servo systems based on dynamic sliding mode control[J]. Transactions of China Electrotechnical Society, 2014, 29(5): 77-83.
[9] Zhang Jianhua, Zhou Shuqing, Ren Mifeng, et al. Adaptive neural network cascade control system with entropy-based design[J]. IET Control Theory & Applications, 2016, 10(10): 1151-1160.
[10] 孙强, 张为堂. 磁通切换永磁电机模糊自适应PI控制策略[J]. 中国电机工程学报, 2017, 37(22): 6611- 6618, 6773.
Sun Qiang, Zhang Weitang. An adaptive-fuzzy PI control strategy for flux-switching permanent magnet motors[J]. Proceedings of the CSEE, 2017, 37(22): 6611-6618, 6773.
[11] 黄依婷, 沈建新, 王云冲, 等. 基于递推最小二乘法观测器的永磁同步伺服电机变参数滑模控制[J]. 中国电机工程学报, 2022, 42(18): 6835-6846.
Huang Yiting, Shen Jianxin, Wang Yunchong, et al. Variable parameter sliding mode control of permanent magnet synchronous servo motor based on recursive least square observer[J]. Proceedings of the CSEE, 2022, 42(18): 6835-6846.
[12] 许德智, 黄泊珉, 杨玮林. 神经网络自适应的永磁直线同步电机超扭曲终端滑模控制[J]. 电力系统保护与控制, 2021, 49(13): 64-71.
Xu Dezhi, Huang Bomin, Yang Weilin. Neural network adaptive super twist terminal sliding mode control for a permanent magnet linear synchronous motor[J]. Power System Protection and Control, 2021, 49(13): 64-71.
[13] Wang Ze, Hu Chuxiong, Zhu Yu, et al. Neural network learning adaptive robust control of an industrial linear motor-driven stage with disturbance rejection ability[J]. IEEE Transactions on Industrial Informatics, 2017, 13(5): 2172-2183.
[14] Yang Hongjun, Liu Jinkun. An adaptive RBF neural network control method for a class of nonlinear systems[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 457-462.
[15] 唐志勇, 马福源, 裴忠才. 四旋翼的改进PSO-RBF神经网络自适应滑模控制[J/OL]. 北京航空航天大学学报: 1-14[2022-11-10]. DOI: 10.13700/j.bh. 1001-5965.2021.0477.
Tang Zhiyong, Ma Fuyuan, Pei Zhongcai. Improved PSO-RBF neural network adaptive sliding mode control for quadrotor system[J/OL]. Journal of Beijing University of Aeronautics and Astronautics: 1-14[2022-11-10]. DOI: 10.13700/j.bh.1001-5965.2021. 0477.
[16] 王爽心, 杨辉, 张秀霞. 基于混沌遗传算法的主汽温系统RBF-PID控制[J]. 中国电机工程学报, 2008, 28(23): 87-92.
Wang Shuangxin, Yang Hui, Zhang Xiuxia. A novel RBF-PID control strategy for fresh steam temperature based on chaotic genetic algorithm[J]. Proceedings of the CSEE, 2008, 28(23): 87-92.
[17] 李明, 封航, 张延顺. 基于UMAC的RBF神经网络PID控制[J]. 北京航空航天大学学报, 2018, 44(10): 2063-2070.
Li Ming, Feng Hang, Zhang Yanshun. RBF neural network tuning PID control based on UMAC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2063-2070.
[18] 何海军, 蒙西, 汤健, 等. 基于ET-RBF-PID的城市固废焚烧过程炉膛温度控制方法[J]. 控制理论与应用, 2022, 39(12): 2262-2273.
He Haijun, Meng Xi, Tang Jian, et al. ET-RBF-PID- based control method for furnace temperature of municipal waste incineration process[J]. Control Theory & Applications, 2022, 39(12): 2262-2273.
[19] 王卓, 王玉静, 王庆岩, 等. 基于协同深度学习的二阶段绝缘子故障检测方法[J]. 电工技术学报, 2021, 36(17): 3594-3604.
Wang Zhuo, Wang Yujing, Wang Qingyan, et al. Two stage insulator fault detection method based on collaborative deep learning[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3594-3604.
[20] 杨旭红, 陈阳, 贾巍, 等. 基于RBF神经网络的电压外环滑模控制的Vienna整流器[J]. 电力系统保护与控制, 2022, 50(18): 103-115.
Yang Xuhong, Chen Yang, Jia Wei, et al. Vienna rectifier with voltage outer loop sliding mode control based on RBF neural network[J]. Power System Protection and Control, 2022, 50(18): 103-115.
[21] 杜晓闯, 涂红兵, 黎岢, 等. 基于径向基神经网络仿真γ能谱模板库的核素识别方法[J]. 清华大学学报(自然科学版), 2021, 61(11): 1308-1315.
Du Xiaochuang, Tu Hongbin, Li Ke, et al. Radionu- clide identification method based on a gamma-spectra template library simulated by radial basis function neural networks[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(11): 1308-1315.
Parallel Displacement Velocity Control of Permanent Magnet Synchronous Linear Motor with Variable Parameters Based on Composite Neural Network Reconstruction Object
(Fujian Key Laboratory of New Energy Generation and Power Conversion Fuzhou University Fuzhou 350116 China)
Apermanent magnet synchronous linear servo motor has the characteristics of high thrust density, high efficiency, and fast control response. It is widely used in rail transit, intelligent manufacturing, and aerospace fields. The electrical or mechanical parameters of the motor and nonlinear resistance interference will affect the high precision control of the linear servo. Therefore, the stable and efficient displacement control algorithm has important engineering application value to improve the system performance. Servo control can be divided into serial and parallel systems according to the relative position of displacement and velocity loop. However, whether serial or parallel control, most controller parameters need to be set in advance and are generally fixed, and adjusting the actual control effect is impossible. This paper proposes a parallel control strategy of variable parameter displacement velocity of permanent magnet synchronous linear motor based on composite neural network reconstruction object, which realizes the high-performance control of linear servo motor.
Firstly, a parallel controller with variable parameters is designed using the error information of the moving displacement and linear velocity. Then, the displacement output of the permanent magnet synchronous linear motor is reconstructed by a composite radial basis neural network containing multi-dimensional information of the control object, and the partial derivative of the displacement to the control signal is obtained. Finally, based on the closed-loop stability condition of the system, a complete parameter update strategy of parallel controller with displacement velocity is provided according to the comparison between periodic retrieval errors and control targets.
In the experiment, a permanent magnet synchronous linear servo system is designed, and different network observations, position controls, and object parameter controls are compared. The network comparison shows that the composite radial-based neural network has fast observation speed and high observation accuracy, and the observation time and root mean square error are 18.63ms and 0.063 mm, respectively. The position control comparison shows that the variable parameter parallel algorithm has higher control precision than the fixed parameter algorithm, such as PID control, with a 30%~50% improvement effect in the displacement and velocity control error indexes. The parameter control comparison shows that in the variable parameter parallel control strategy, when the moving mass changes, the root mean square of displacement error is less than 0.015 mm, and the absolute maximum error is less than 0.060 mm, which means that the algorithm has stability and universality.
The following conclusions can be drawn: (1) The composite RBF neural network structure has better observation performance than the traditional RBF neural network. Compared with the traditional improvement method, it has a better effect with less computing pressure on the processor. (2) Compared with the fixed coefficient algorithm, such as PID, the proposed variable parameter parallel control strategy can effectively improve the control performance of the actuator displacement. (3) The variable parameter parallel control strategy can guarantee the high precision control effect under different displacement settings and object parameters.
Permanent magnet synchronous linear motor, parallel control, composite radial basis function neural network, variable parameters, update mechanism
福建省自然科学基金资助项目(2021J02023)。
2023-01-04
2023-05-18
10.19595/j.cnki.1000-6753.tces.230104
TM359.4
鲍明堃 男,1998年生,硕士研究生,研究方向为现代调速系统。E-mail: 879527923@qq.com
周扬忠 男,1971年生,博士,教授,博士生导师,研究方向为现代调速系统、新能源发电系统等。E-mail: zhty_75313@sina.com(通信作者)
(编辑 陈 诚)
