一种新型智能车载单元OBU系统的设计与量产
2024-04-23张亮周涛涛涂振益彭振文刘强生
张亮 周涛涛 涂振益 彭振文 刘强生

摘 要:OBU(On Board Unit),即车载单元[1]。在智能网联车路系统中,OBU使不同厂商车辆,以及路侧单元RSU(Road Side Unit)[1]互联互通。本文设计了一种新型OBU系统,融合了5G通信、C-V2X通信(Cellular Vehicle to Everything,V2X)[2]和GNSS定位、硬件加密等功能。针对客户需求和OBU系统架构,对软硬件子单元进行了详细分析和设计,经落地优化、批量生产,成功大规模应用于城市公交系统与车路协同项目中。
关键词:车路协同 OBU系统 5G C-V2X 加密
1 引言
在智慧交通和车路协同的大趋势引领下,随着C-V2X新型车用无线通信技术的成熟,汽车网联化需求飞速增长。C-V2X是基于4G/5G等蜂窝网通信技术演进形成的新型车用无线通信技术,当前 C-V2X主要包含车、人、交通路侧基础设施和网络[2]。由车载终端OBU与路侧设备RSU、蜂窝基站、云端平台等组成车路协同系统,实现路况与危险预警等业务应用。
2 OBU终端系统原理
OBU终端系统原理架构如图1所示,系统融合5G、C-V2X、GNSS、WIFI、BLE(低功耗蓝牙)技术于一体、与车载网络总线包括汽车CAN总线、以太网、音视频、RS232和RS4855等通信。OBU采集定位、车辆状态和路况等信息,将这些信息由V2X模块实时发送给路侧单元RSU,RSU与控制中心进行数据通信。此外,OBU还将信息发送给同一RSU服务范围内的其他OBU。RSU将控制中心返回的电子地图、路况、限速预警、调度等信息发送给各个OBU,与OBU连接的屏上实时显示附近区域电子地图、调度等信息。司机根据这些信息选择最优路线,避开堵车或者危险区域。
3 系统硬件设计
3.1 系统硬件框架
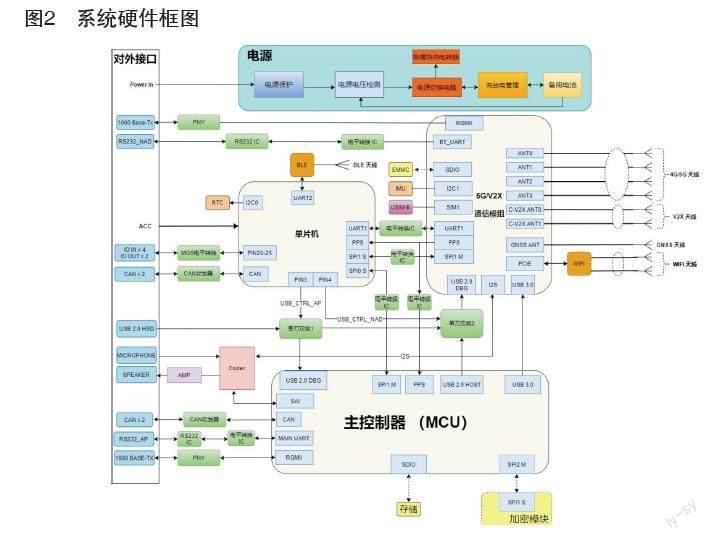
如图2所示,OBU终端硬件总体构成主要有电源系统、主控制器、通信模块、单片机、CAN控制器、车载以太网模块、加密模块、存储模块、惯导和陀螺仪模块等,其中通信模块包含5G、CV2X、GNSS、WiFi、BLE和音视频。硬件系统提供丰富的对外接口,主要包括音视频、RS232、RS485和GPIO等。由于系统硬件包含内容较多,下文只对重点单元进行介绍。
3.2 各模块设计
3.2.1 系统电源
根据车辆电子设备标准与客户需求,本系统电源输入采用标准24V,试验电压波动范围为18~32V,反接电压为28V,过电压为36V [3]。系统电源采用自恢复保险丝防止过流,采用TVS抑制瞬态高压;在低压侧采用NMOS管防反接,防护器件后端接共模电感、X电容和Y电容、LC吸收电路抑制EMI辐射和干扰。
为了满足硬件各个模块的供电需求,负载电源均采用DC-DC和LDO结合的降压方式。DC-DC负责大电流高壓模块供电、LDO负责小电流低压模块供电。
本系统备用电源采用安全性极高的镍氢电池组。针对现有镍氢电池充电技术速度慢、负载适应性差、异常状态响应迟缓等缺点。设计了一种专用恒流充电电路,即采用可调节充电电流和电压的恒流充电方式给电池充电,具体由单片机控制开关电路和I2C总线来分别调节充电电流和电压值。通过比较器比较充电电压与参考电压,当充电电压大于参考电压时,比较器输出高电平给开关管,从而控制降压芯片关闭充电,以此确保电池在充电过程中发生意外及时断电。同时,单片机实时采集电池温度和电压,当有异常情况发生时及时关闭充电。
3.2.2 主控制器
系统主控制器硬件采用模块化核心板设计,主芯采用恩智浦高性能车规级处理器IMX8QXP,内置4核Cortex-A35,最高主频1.2GHz。核心板对外接口主要包括:PCIE5.0、USB3.0、CAN 接口、千兆车载以太网接口、音视频接口等。主控制器IMX8QXP上运行Linux操作系统。主要负责各模块、外设的数据交互、存储、系统固件升级等。
3.2.3 通信模组
通信模组选用移远AG550,主要完成5G通信、GNSS定位数据解析与高精度差分定位协议解析、V2X 数据收发和加密、以太网通信、业务逻辑运算、CAN总线车辆数据获取、FOTA固件升级、电话语音、九轴惯导和陀螺仪传感器驱动与数据解析等。为了满足车内通信应用场景,OBU系统还提供了WIFI、BLE连接,手机APP用户通过5G网络实现远程车辆诊断和控制,通过BLE实现汽车数字钥匙。
3.2.4 CAN收发器
局域网络控制器简称为CAN,主要负责车载故障诊断系统的数据传输工作。
如车辆刹车状态、转向灯状态、危险信号灯状态、速度、方向盘转角等。CAN 收发器选用型号为TJA1042T,符合 ISO11898 协议标准[3]。收发器电路采用了共模滤波器、匹配电阻、ESD保护等措施以提升信号完整性和抗干扰性能。
3.2.5 硬件加密
硬件加密已经成为V2X通信不可或缺的重要一环。系统采用加密模块XDSM3276,对V2X通信等进行加密,通过SPI总线挂在主控制器上。模块支持国密SM2算法,内部储存空间用于保存关键信息和秘钥。
4 系统软件设计
4.1 系统软件总体框架
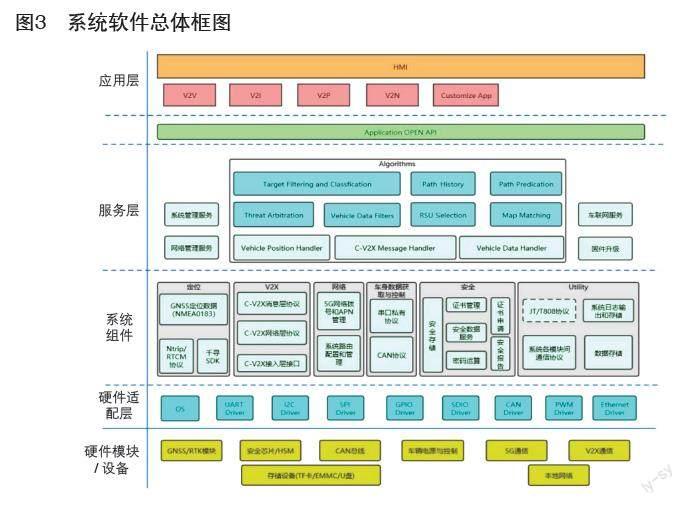
如图3所示,系统软件包含硬件适配层、系统组件、服务层和应用层。硬件适配层包含操作系统相关接口和硬件外设接口驱动;系统组件包含GNSS定位、V2X、网络、车身数据获取与控制、安全等各个模块;服务层包含系统管理、网络管理、V2X危险检测等应用算法、OTA固件升级等各种服务;应用层包含车路协同17个应用场景具体实现[2]、TBOX、智驱、节油及相关服务。
4.2 通信协议
系统通信协议采用轻量级的数据交换格式规范JSON[2]。系统内部各模块间通信消息类型分为请求、响应和通知。系统定义了四个模块角色,分别为上位机诊断软件HDU、电源管理控制器PMU、系统主控制器MCU、C-V2X处理器CVU。
4.3 各模块设计
(1)主控制单元(MCU): MCU负责不同模块之间的通信。针对不同模块之间的接口分别开启单独线程接收其命令,并对其进行解析,然后分发给目的设备。MCU与HDU和PMU均采用串口进行通信,创建不同的线程来接收处理HDU和PMU发送的命令;MCU与CVU采用网络socket进行通信。CVU发送的数据首先进行协议转换,然后将自组包的十六进制数据译成json格式,再调用指定函數对其解析。
(2)GNSS 定位模块:GNSS定位为车辆提供基础和高精度差分定位服务。涉及协议有NMEA0183、Ntrip Client和RTCM等。如图4所示,GNSS硬件定位模块提供基本定位数据,系统内开启GNSS守护进程负责与硬件定位模组进行通信。定位模组信息以NMEA0183协议输出,系统通过UBX协议对定位模组进行相关参数配置。解析出基本定位信息后再将其注入V2X模块,提供定位服务。
(3)CAN数据获取与车辆控制: CAN数据传输是基于J1939协议,系统主控制器首先创建CAN通道,建立与车辆CAN总线之间的通信,接收CAN上的数据并进行解析,解析后的数据通过socket传给CVU,最终送给V2X进行处理;主控制器同时接收CVU传输过来的车辆数据命令,解析完成后通过CAN 接口发给车辆CAN总线,实现对车辆的控制。
(4)V2X协议栈:V2X协议栈包含接入层接口、网络层和消息层协议实现,其框架如图5所示,接入层接口即Uu和PC5接口,由模组厂商提供相应的SDK接口来初始化、发送和接收数据。网络层包含数据子层和管理子层,数据子层主要包括适配层、IP和UDP/TCP 以及专用短消息协议;管理子层主要完成系统配置及维护。消息层位于应用层内部,向下对接网络层的数据子层,向上支持用户应用。
5 系统测试
OBU在研发和量产阶段行了大量测试,包括信号完整性、射频性能、V2X内外场测试、PC5接口的sidelink测试、功耗测试、可靠性测试。其中可靠性测试包括EMC、安规、高低温、振动、防尘防水等测试。测试结果均符合指标要求。
6 量产出厂流程及测试
量产是整个产品落地应用的重要环节,经过多次小批量试产,总结设计出了一套高效的量产流程。整个过程采用精细化管理,以控制不良率。
如图6所示量产出厂流程。生产准备包括:物料准备,测试软件、工装治具开发、核心板和车载以太网芯片程序烧录等。贴片生产是指将相应的元器件物料贴装在PCB板上,贴完后通过光学设备对PCBA进行质量检测。检测完毕后,对PCBA半成品进行通信模组固件烧录。烧录完成后对PCBA半成品进行全面的功能和性能测试,通过测试的产品,将测试信息写入到被测半成品内部存储区,电脑自动打印二维码,二维码包含的信息有:生产测试信息、出厂编号、通信模组SN码和IMEI码。待组装完成后将之前打印的二维码贴于产品外壳,用扫码枪扫描二维码,便可查看该产品的相关信息。最后,整机产品全部进行老化测试后方可出厂。
7 结束语
本文从客户需求和实际应用出发,设计了一种新型OBU系统,融合了C-V2X等多种通信技术和硬件加密技术,成功大规模应用于城市公交系统、车路协同试点道路等多个场景,大大加速了智慧交通,无人驾驶的产业落地进程。系统后续将进一步对接车身雷达传感系统,形成一套更加智能的无人驾驶辅助系统。
参考文献:
[1]李焱.ETC系统中OBU的低功耗设计与研究[D].武汉邮电科学研究院, 2008.
[2]车载信息服务产业联盟&未来移动通信论坛.智能网联汽车基本应用白皮书[R/OL].2016.https://max.book118.com/html/2022/0420/8061077117004073.shtm.
[3]GB/T 28046.2-2019.道路车辆 电气及电子设备的环境条件和试验 第2部分:电气负荷[S].
