基于激光干涉仪同步测量的动态校准装置
2024-04-19胡晓磊郭志敏傅云霞
任 瑜, 胡晓磊, 郭志敏, 傅云霞, 张 丰
(上海市计量测试技术研究院,上海 201203)
1 引 言
大尺寸计量是航空航天、船舶、能源等大型高端装备制造的重要基础支撑[1~4]。近年来,实时协同的智能制造新模式催生了时变几何量的测量新需求,这不仅要求大尺寸测量系统具备高动态测量能力,还要求计量校准方法可满足时变参量的瞬时动态测试需求[5~7]。
目前,标准圆轨迹发生器是最主要的动态校准装置,JJF 1242《激光跟踪三维坐标测量系统校准规范》中通过测量标准圆轨迹并拟合圆周直径,测试激光跟踪仪的动态示值误差等参数[8~11]。美国北卡罗来纳大学、德国卡尔斯鲁厄理工学院也设计了类似的旋转机构[12]。由于轨迹拟合中忽略时间信息,基于标准轨迹的动态校准无法直接体现激光跟踪仪测量时变位移等的瞬时精度。瞬时动态测试的关键是被测仪器与标准器在同时刻采集数据,即二者的时间轴统一。为此,文献[13]研制了呈三角波变速运动的圆轨迹产生器并用于激光跟踪仪的瞬时定位准确度测试,该装置利用已知规律的速度对准测量值与标准值的时间轴,但时间对准精度受采样频率等限制。文献[14]通过同步锁存激光干涉仪与光栅系统的数据实现单轴系统的动态校准。中国计量科学研究院基于同步触发原理,统一光栅采集和激光跟踪仪测量的测量起点/终点及测量点数,实现激光跟踪仪的动态精度测试[15]。
综上,利用外部脉冲同步触发被校准仪器与标准器,是瞬时定位等时变参量的动态校准的理想路径。因此,本文研制一种基于激光干涉仪同步测量的动态校准装置。在介绍该装置的系统组成的基础上,重点评定了其瞬时长度示值的测量不确定度。通过动态校准装置与激光干涉仪及激光跟踪仪的同步触发测量实验,证明了动态校准装置的不确定度评定的合理性及动态校准装置在激光跟踪仪瞬时动态精度测试中的可行性。
2 动态校准装置的系统组成
动态校准装置由直线运动导轨、激光干涉仪(含环境传感器)、同步触发器和动态校准软件共同组成,如图1所示。

图1 动态校准系统Fig.1 Dynamic calibrator
2.1 直线运动导轨
直线运动导轨的结构如图2所示。直线运动导轨以大理石为基底,其上安装金属直线导轨,全量程6 m的直线度优于0.02 mm。直线运动导轨采用直线电机驱动,配合光栅尺形成闭环控制,可产生0~4 m/s范围内任意速度的直线运动。在动态校准中,直线运动导轨仅用作运动发生器。
2.2 激光干涉仪
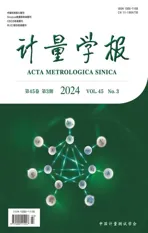
由光的干涉原理知,激光干涉仪具有极佳的动态性能。并且随着技术的发展,商用激光干涉仪多具备外部脉冲触发测量模式,降低了同步获取激光干涉仪测量数据与激光跟踪仪测量数据的难度。因此,动态校准装置中选用Agilent 5530激光干涉仪作为长度标准器,其控制器的外部触发输入口如图3所示,使用时需接入外部触发信号、+5 V电源及GND;并且该激光干涉仪的底层向用户开放,支持二次开发。此外,Agilent 5530激光干涉仪自带环境传感器,将其置于直线运动导轨的中部,用于动态校准装置的环境补偿。
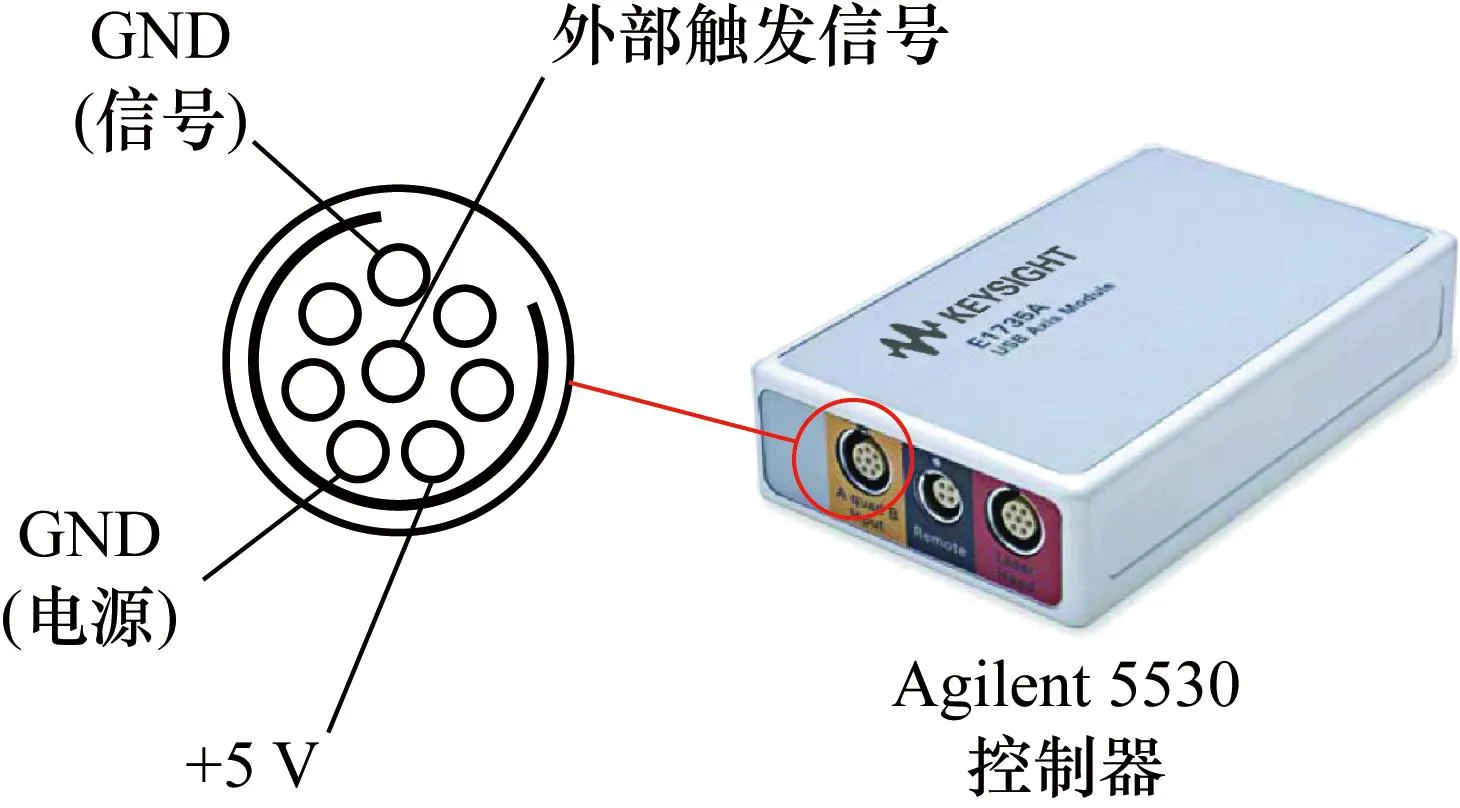
图3 外部触发输入口Fig.3 Input port of external trigger
2.3 同步触发器
同步触发器可产生多路同步脉冲,是实现激光干涉仪与激光跟踪仪同步测量的关键,同时也是动态校准中时间信息准确稳定的关键。因此,同步触发器采用如图4所示结构。选用GNSS驯服时钟作为时钟源,其结构如图4所示,即在10 MHz恒温晶振的基础上,采用GNSS信号授时,以相位差调节电压的方式对恒温晶振产生的1 pps(packet per second)信号进行驯服,使其同步于铯原子钟,保证动态校准中的时间信息的准确度及稳定性。经校准,同步触发器的相对频率偏差优于10-11。然后,选用脉冲分配器实现一路标准脉冲均分四路,并配合等长线缆分别输送至激光干涉仪和激光跟踪仪,以减少多路脉冲间的时延。经校准,同步触发器的两路脉冲间时延优于5 ns。最后,采用串口通信方式,与动态校准软件交换控制信息及测量数据,并采用220 V转5 V外接电源进行供电。

图4 同步触发器整体框图Fig.4 Synchronous trigger overall block diagram
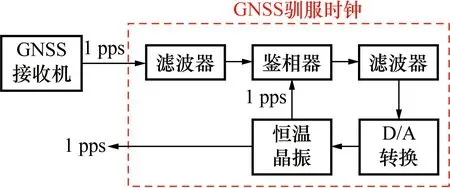
图5 GNSS驯服时钟局部框图Fig.5 Partial block diagram of the GNSS tame clock
2.4 动态校准软件
动态校准软件使用Visual C++,调用激光干涉仪的E1735A.dll和激光跟踪仪的SA SDK进行开发,采用多线程操作,可集成控制直线运动导轨、激光干涉仪、同步触发器及激光跟踪仪等。其流程图如图6所示,该软件可完成设备连接、参数设置、测量执行及数据处理等过程,简化了动态校准操作过程。
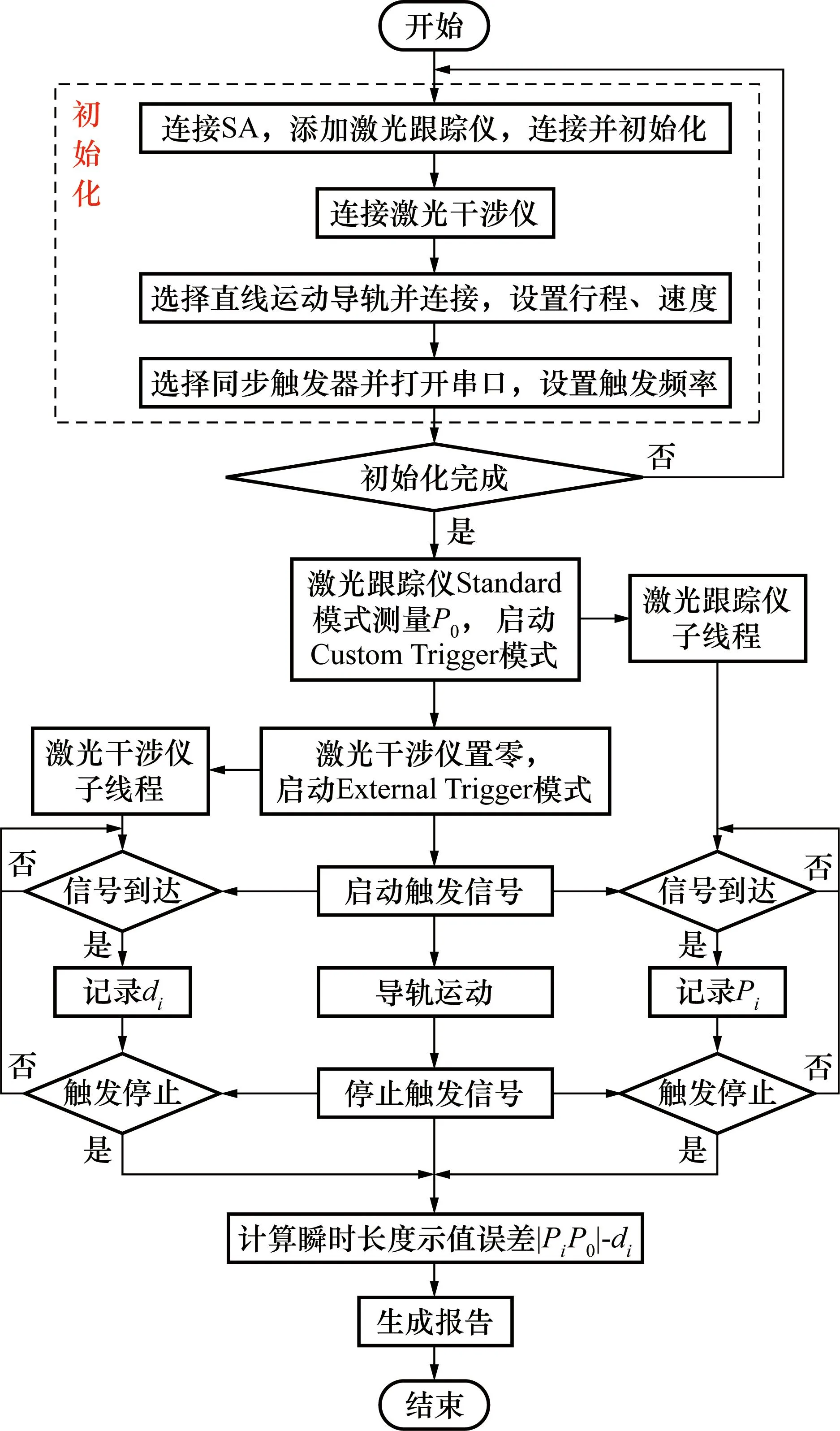
图6 动态校准流程图Fig.6 Dynamic calibration flowchart
3 动态校准装置的不确定度评定
瞬时动态准确度测试中,动态校准装置用于产生与激光跟踪仪(被测仪器)同时刻测量的瞬时长度参考值。因此,其瞬时长度值的测量不确定度须从长度测量和时间同步2方面评定。
3.1 长度测量引入的标准不确定度
1) 激光干涉仪最大允许误差引入的标准不确定度
Agilent 5530激光干涉仪的最大允许误差为±0.3×10-6L,则引入不确定度分量:
(1)
式中:L为测量长度。
2) 直线运动导轨直线度引入的标准不确定度
激光干涉仪的移动反射镜和激光跟踪仪的球面反射靶标固定在直线运动导轨的移动工作台上。由于二者不重合,受导轨直线度的影响,存在阿贝误差。以单方向阿贝误差为例,分析如图7所示。

图7 阿贝误差Fig.7 Abbe error
单方向阿贝误差计算模型为:
≈-Asinα
(2)
式中:h为远点处移动工作台相对于光路的偏移,最大值为直线度误差hmax=0.02 mm;A为移动反射镜与球面反射靶标间距离,即阿贝臂长度;α为远点处移动工作台相对于光路的偏摆角,顺时针为正,当移动工作台沿导轨方向宽300 mm,其最大值为sinαmax=0.02/300。直线运动导轨在水平和垂直方向的参数如表1所示。
表1 直线度引入误差Tab.1 Straightness error
则两方向直线度共引入不确定度分量:
(3)
式中:ΔL2H=0 μm为水平方向直线度引入误差;ΔL2V=1.33 μm为垂直方向直线度引入误差。
3) 环境因素的影响引入的标准不确定度
温湿度、气压、风速及导轨振动等环境因素均影响动态校准装置的瞬时长度值。为综合评定环境影响,采用如下方式:移动工作台依次静止于导轨的两端及中间3个位置;每个位置处,激光干涉仪置零,监测1 min内激光干涉仪示值变化量;经实测,激光干涉仪示值变化量优于0.6 μm/min。以速度100 mm/s为例,单次测量用时约1 min,则环境因素的影响引入不确定度分量:
(4)
3.2 时间不同步引入的标准不确定度
1) 2路触发信号间时延引入的标准不确定度
同步触发器共输出4路同步触发信号,#1供激光干涉仪使用,#2~#4预留给被测仪器。经校准,#1与#2~#4间的时延t如表2所示。

表2 4路同步触发信号间时延Tab.2 Delay between 4 synchronous trigger signals
受Agilent 5530激光干涉仪限制,动态校准装置的最大速度1 m/s,则2路信号间时延产生的最大长度误差为4.8 nm,其引入的标准不确定度为:
(5)
2) 激光干涉仪测量时延引入的标准不确定度
Agilent 5530激光干涉仪的说明书未标明测量时延(从收到触发信号至完成测量的时间),但其最大触发频率为100 kHz。而最大触发频率1 kHz的同类竞品的测量时延为±0.5 μs。故推测Agilent 5530激光干涉仪的测量时延约±0.5 μs,则以最大速度1 m/s计算,由其产生的最大长度误差为±0.5 μm,其引入的标准不确定度为:
(6)
3) 激光干涉仪与计算机通信时延引入的标准不确定度
Agilent 5530激光干涉仪的控制器中具备硬件缓存区,当外部触发脉冲到达,测量值及相关信息被锁存,当动态校准软件调用读取函数时,测量值被传输至计算机。如图6所示,动态校准软件中,瞬时长度示值误差在测量结束后统一计算,并且按照同步脉冲信号的时间对齐测量值,与测量值到达计算机的时间无关。因此,激光干涉仪至计算机的通信时延对瞬时长度示值误差无影响,在测量不确定度评定中无须考虑。
动态校准装置的测量不确定度分量汇总如表3所示。

表3 测量不确定度分量汇总Tab.3 Summary of Measurement uncertainty components
综上,动态校准装置的瞬时长度的标准不确定度为:
(7)
则扩展不确定度为:
U=Q[1.8 μm, 3×10-7L](k=2)
(8)
4 实验验证
为验证动态校准装置的不确定度评定的合理性及动态校准装置在激光跟踪仪瞬时动态准确度测试中的可行性,设计如图8所示实验。

图8 实验布局Fig.8 Experiment layout
动态校准装置(激光干涉仪1)与1台Agilent 5530激光干涉仪(激光干涉仪2)及1台Leica AT960激光跟踪仪同步触发测量。2台激光干涉仪分别放置在直线运动导轨两端,激光跟踪仪放置在导轨的中垂线处且距离导轨约4 m。2移动反射镜间阿贝臂AV=20 mm,球面反射镜与移动反射镜间阿贝臂AH=40 mm。实验中,2台激光干涉仪共用1组环境传感器,激光跟踪仪自带环境传感器,且它们均在实测状态下实施测量。
4.1 同型号激光干涉仪比对实验
采用动态校准装置与同型号激光干涉仪的比对实验,以验证动态校准装置的不确定度评定的合理性。实验中,选取导轨中4 m区间段,并以动态校准装置的长度示值与激光干涉仪的长度示值的差值作为长度示值误差。首先是100 mm等间隔静态测量。其次是100 mm/s动态测量,同步触发器的脉冲频率100 Hz,重复测量3次。最后是1 m/s,动态测量,同步触发器的脉冲频率100 Hz。测量结果如图9、图10所示。

图9 不同速度下长度示值误差Fig.9 Errors at different speeds

图10 速度100 mm/s时3次测量长度示值误差Fig.10 Errors of 3 measurements at 100 mm/s
1) 由图9可知,不同速度下长度示值误差随长度的变化趋势一致,反映了导轨直线度的影响。
2) 图9、图10中长度0处的长度示值误差不为零,反映了从激光干涉仪置零到触发信号启动的时间段内环境因素导致的两台激光干涉仪的示值漂移。
3) 图9中多数长度处,静态测量的长度示值误差大于动态测量的长度示值误差,进一步比较相同长度处静态测量与100 mm/s速度的长度示值误差,如图11所示。40个采样长度中,除2处(长度1 000 mm 及1 100 mm)外,静态测量在其余38处的长度示值误差均大于100 mm/s速度下的长度示值误差。这一现象反映了因静态测量的总时长大于动态测量的总时长,环境因素影响更明显。
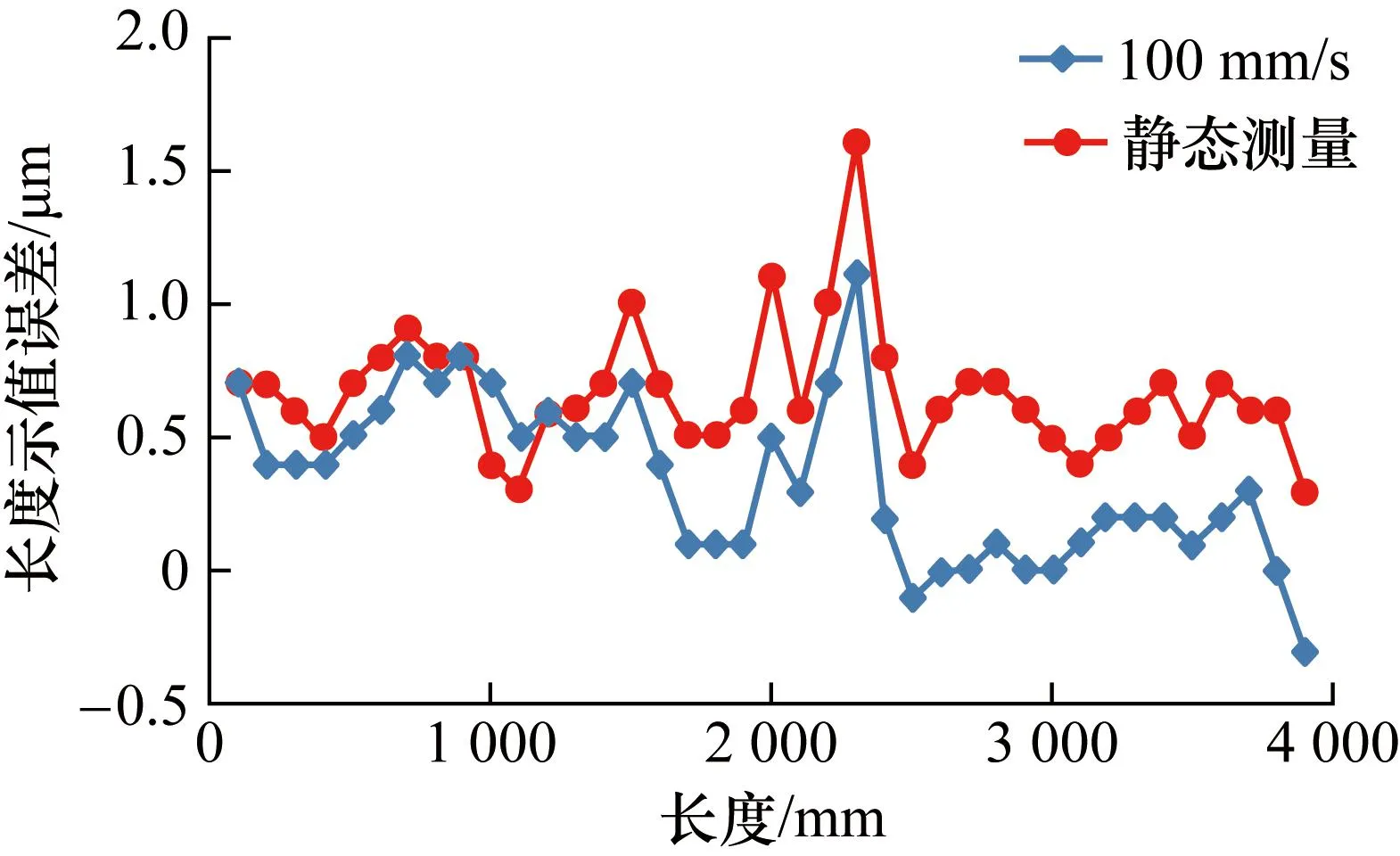
图11 静态测量与速度100 mm/s时长度示值误差Fig.11 Errors at static and 100 mm/s
4) 图9与图10比较,相同长度处,100 mm/s速度下与1 m/s速度下的长度示值误差的差值最大值为0.5 μm,而100 mm/s速度下的3次测量的长度示值误差的差值最大值为0.6 μm,反映了在激光干涉仪的速度范围内瞬时长度示值误差与速度的相关性不显著,间接说明激光干涉仪的测量时延的影响可忽略。
5) 图9与图10中,长度示值误差均在测量不确定度(k=2)范围内,证明动态校准装置的不确定度评定合理。
4.2 激光跟踪仪瞬时长度测试实验
采用动态校准装置作为标准器,测试激光跟踪仪的静态点到点长度示值误差及不同速度下瞬时点到点长度示值误差,以动态校准装置用于瞬时动态测试的可行性。实验中,选取导轨中4 m区间段,并以激光跟踪仪的点到点长度示值与动态校准装置的长度示值的差值作为点到点长度示值误差。
因球面反射镜与移动反射镜间阿贝臂AH=40 mm,动态校准装置的瞬时长度示值测量不确定度为Q[3.2 μm, 3×10-7L](k=2);因激光跟踪仪距离导轨约4 m,其MPE=±(15 μm+6×10-6L)≈±40 μm;故测量能力Cm>12。分别进行100 mm等间隔静态测量、100 mm/s及1 m/s动态测量,同步触发器的脉冲频率100 Hz。测量结果如图12所示,分析如下:
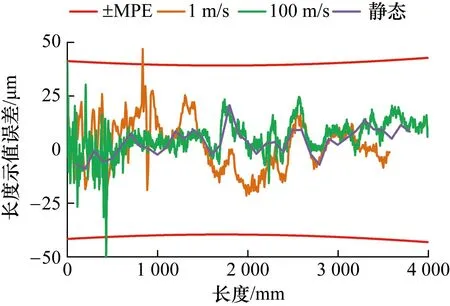
图12 不同速度下激光跟踪仪长度示值误差Fig.12 Errors of laser tracker at different speeds
1) 静态测量下,长度示值误差在[-10 μm, 21 μm]内变化,均在最大允许误差范围内;
2) 100 mm/s速度下,瞬时长度示值误差在[-59 μm,51 μm]内变化;4 050个采样点内23个点超出最大允许误差范围,占比小于0.6%;
3) 1 m/s速度下,瞬时长度示值误差在[-22 μm,48 μm]内变化;384个采样点内1个点的瞬时长度示值误差超出最大允许误差范围,占比小于0.3%。
因此激光跟踪仪的静态测量准确度优于瞬时动态测量准确度。分析其原因:一方面是静态测量中每个数据为50次采样的平均值,而动态测量中每个数据仅为单次采样值;另一方面是激光跟踪仪的硬件响应速度限制其动态性能。此外,100 mm/s与1 m/s的测量结果比较反映了在1 m/s速度范围内激光跟踪仪的瞬时长度示值误差与速度的相关性不显著。因此推断:在1 m/s速度范围内,数据获取方式是造成激光跟踪仪的动静态测量精度差异的主要因素。
5 结 论
本文采用同步触发测量原理,研制一种激光跟踪仪动态校准装置。首先,介绍了该装置的组成。其选用激光干涉仪作为长度标准器,设计基于GNSS驯服时钟的同步触发器触发激光干涉仪与激光跟踪仪同步测量并确保时间准确稳定,配合直线运动导轨作为运动发生器,并集成开发动态校准软件实现控制一体化。其次,从激光干涉仪的最大允许误差、直线运动导轨的直线度、环境因素、触发信号间时延及激光干涉仪测量时延等的多方面综合评定动态校准装置的长度示值的测量不确定度为Q[1.8 μm, 3×10-7L](k=2)。最后,通过同步触发动态校准装置与同型号激光干涉仪进行比对实验,验证了不确定度评定的合理性。并且,通过激光跟踪仪瞬时长度测试实验说明了动态校准装置瞬时动态精度测试中的可行性。
当前,受Agilent 5530激光干涉仪限制,动态校准装置的最大速度1 m/s,后续将通过更换其他品牌型号的激光干涉仪将动态校准装置的最大速度提升至4 m/s,拓展激光跟踪仪瞬时长度测试的范围。