列控车载ATP设备操作培训平台关键技术研究与软件实现
2024-04-16尤瑞君秦晓光
杨 森,尤瑞君,许 镇,秦晓光
在列车运行过程中,列控车载ATP 设备会受到列车速度、地面数据、通信网络、设备本身的软硬件设计等多方面影响而出现异常情况,列车司机需要对各种异常情况做出合理处置,才能保证高速铁路列车安全高效运行。因此,针对列控车载ATP 设备的操作培训是高速铁路列车司机培训的重要一环,通过操作培训平台进行故障条件下的模拟操作可以提高司机的应急反应能力,是提高培训质量的重要手段[1-2]。
目前,行业内各设备厂商和研究单位针对列控车载ATP 设备的操作培训做了一些研究:伍田浩睿等[3]设计了车载ATP 自动化操作系统;李晓宇[4]设计并实现了CTCS-3 级列控车载子系统在线培训平台;孙鸣蔚[5]研究并设计了高铁列控设备故障仿真培训系统。然而这些培训平台在一定程度上存在设备反应与现场真实情况不符、故障模拟训练不足、司机视角显示的线路位置不准确等缺点。若采用真实ATP 设备搭建仿真运行环境进行培训,虽可还原现场情况,但成本过高且培训设备运行的灵活性较差。
因此,考虑操作反应与现场设备一致、足够的故障模拟场景、视觉环境显示准确等要求,提出一种基于真实列控车载ATP 设备应用软件的操作培训平台设计方案,引入故障注入技术和基于PID控制的司机视角同步跟踪显示算法,能够实现对设备真实运行情况及故障场景的精准呈现,并应用3D技术搭建司机驾驶视角的视觉显示场景,提高培训过程的沉浸感[6],实现极佳的培训效果。由于列控车载ATP 设备操作培训平台(以下简称“培训平台”)既可以多机远程联网运行,也可以单机安装多个软件运行,对硬件没有特殊要求,因此,本文主要探讨培训平台软件设计。
1 软件设计
培训平台软件主要由故障数据库、仿真调度引擎、车载设备功能模块、仿真环境模块、操作接口模块、视听显示模块、外接设备等组成,软件架构见图1。
1)故障数据库用于存储故障重现脚本,完善的故障数据库关系到培训平台重现故障场景的完备性与真实性[7]。
2)仿真调度引擎负责整个故障重现过程的调度,实现脚本选取、数据配置、操作信息采集、运行过程记录等功能[8]。
3)车载设备功能模块负责模拟真实的车载ATP 设备,由主机应用软件、DMI(人机接口)应用软件、适配软件等构成。适配软件负责驱动应用软件的正常运行,将仿真环境模块的环境数据发送给主机应用软件,将主机应用软件的输出信息实时发送给仿真环境模块。
4)仿真环境模块用来模拟车载ATP设备运行过程中的环境数据,主要包括列车接口、速度、应答器报文、轨道电路载频和低频、无线消息报文等。仿真环境模块通过读取运行脚本,以及从操作接口模块获取的驾驶台操作指令等信息,实时生成相应的环境数据,以保证车载设备功能模块按照脚本正常运行。
5)操作接口模块负责处理来自外接设备的操作动作指令,主要包括牵引/制动手柄级位、方向手柄位置、驾驶台激活开关位置等,并将动作指令发送给仿真环境模块,同时将操作记录发送给仿真调度引擎,用于后续的培训评估。
6)视听显示模块主要是对司机工作环境的画面和声音进行模拟,营造出真实驾驶室的视觉环境,是保证培训平台仿真效果的关键模块[9-10]。所涉及到的事件联动主要包括列车速度、列车位置、进路与道岔、进路与信号机之间的相互匹配[11-12];根据仿真调度引擎和车载设备功能模块的指令控制当前视觉变化条件,如列车前进的速度视觉变化、道岔的位置、信号机点灯的颜色等[13]。轨道、应答器等关键设备可应用3D 仿真软件,将素材按指定位置摆放,与运行脚本联动,保证显示的正确性。
图1 中外接设备主要指仿真驾驶台上的操作手柄、按钮等受训人员可直接操作的物理器件。
由于培训平台采用真实车载ATP 设备主机应用软件,不存在操作反应与现场设备不一致的情况,因此,本文重点探讨故障注入和司机视角同步跟踪显示2个关键技术。
2 故障注入技术
故障处置培训是列控车载ATP 设备操作培训的重要内容,本文引入故障注入技术以实现操作培训平台的故障模拟功能。故障注入是指按照事先选定好的故障模型,采用某种策略人为地、有意识地将故障注入目标系统,促使错误发生或者功能失效[14-16]。注入方式主要分为3种:基于硬件的故障注入、基于软件的故障注入、基于仿真的故障注入。
由于培训平台依托于运行脚本,视听显示模块的显示内容也与运行脚本联动,因此可基于运行脚本进行故障注入,对应基于仿真的故障注入方式;培训平台中的车载设备功能模块依托真实设备的主机应用软件,可直接在软件中植入故障代码实现基于软件的故障注入(基于硬件的故障注入不适用于本培训平台)。
2.1 基于运行脚本的故障注入
由运行脚本触发故障是指根据脚本设计的外部条件变化,导致设备出现非常规运行情况,例如轨道电路掉码、无线通信超时、行车许可MA缩短导致冒进、紧急制动停车、应答器报文缺失等。培训平台会根据仿真环境的变化,做出与真实设备相同的反应[17-18],从而实现故障注入。
在制作好原始的运行脚本后,可在脚本中添加故障触发条件和故障内容。触发条件可以是时间、里程或其他特定的匹配条件;故障内容可以是错误的脚本数据,如错误的轨道电路载频/低频、无线闭塞中心(RBC)消息、应答器报文等,也可以体现为特定命令字段,当培训平台识别到脚本中的命令字段时,自动设置相关的故障,如发送错误的速度脉冲信号、中断与RBC的无线通信、制动反馈异常等。
以现场经常出现的CTCS-3 级车载ATP 设备无线通信超时故障为例,可设置运行脚本在指定位置停止发送RBC 消息,导致车载ATP 设备超过20 s没有收到无线消息而判断无线通信超时,从而触发最大常用制动,无线通信超时故障模拟流程见图2。在此场景下,对于受训人员的任何操作,培训平台均可做出与真实设备相同的反应,而第三方培训平台是无法达到这种效果的。
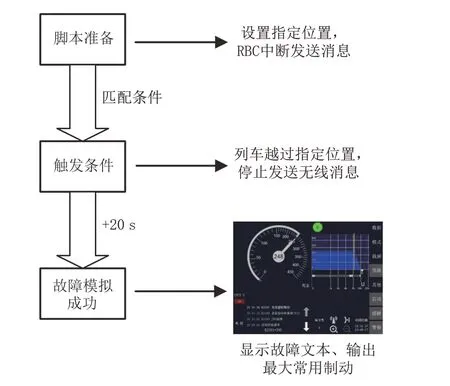
图2 无线通信超时故障模拟流程
基于运行脚本的故障注入可以应用于现场故障案例的复现,可通过对现场记录数据的分析,制作运行脚本,进而实现常见故障位置和故障类型的深刻训练,达到良好的培训效果。
2.2 基于软件插桩的故障注入
在现场长时间运行过程中,真实列控车载ATP 设备会遇到各种复杂情况,可能会因软件设计问题等导致设备出现异常。司机操作培训也需对设备本身出现的异常进行相应培训。由于此类故障无法预料,无法从运行脚本设置,故采用基于软件插桩的方式进行故障注入,通过设置故障点,可模拟意外宕机、BTM 模块故障等非正常状态。此种故障注入方式可以增加培训的丰富度,对未来可能发生的非常规故障做到有备无患。
本文采用时间触发、里程触发、场景触发3 种触发条件对ATP 应用软件进行故障插桩设置。时间触发是指在插桩点设置定时器,待时间满足后,触发故障代码运行,影响函数的返回值,进而改变软件运行状态;里程触发是指在插桩点设置里程相关条件判断,当列车运行里程满足条件后,触发插桩代码,进而影响函数的运行结果;场景触发是指在插桩点设置多条件判断,例如收到某个应答器报文、某个无线消息等多个条件的组合,以此作为插桩触发的条件。
基于软件插桩的故障注入方式可以设置严重设备故障,以设备的意外宕机为例,可设置运行过程中指定时间触发安全控制单元(VCU)宕机故障,模拟流程见图3。
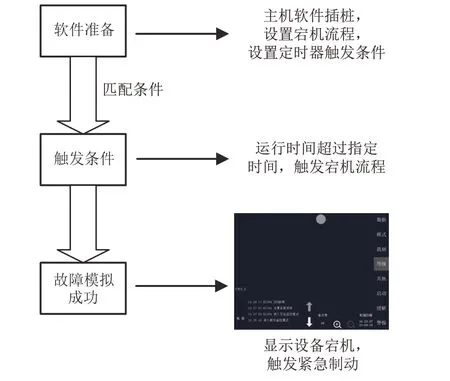
图3 异常宕机故障模拟流程
3 司机视角同步跟踪显示
3.1 算法设计
视听显示模块周期性地获取当前列车的运行状态,进行司机视角的动态显示,其中速度和位置是司机视角同步跟踪显示的重要内容。
由于周期通信存在延迟、阻塞等不可避免的情况,司机视角的显示必然会存在一定的滞后性,且简单地获取列车速度进行视觉仿真,会造成列车位置的误差累积,严重影响轨道参考物的正确显示,进而影响受训人员的视觉观察和故障处置。因此,本文采用PID控制算法,在保证显示流畅度的基础上,对司机视角显示中的列车位置进行动态跟踪控制。
PID 控制算法是经典控制理论中的典型应用,具有结构简单、鲁棒性和适应性较强的特点。本文采用的PID 控制算法,以期望列车位置为控制目标,即以周期性获取的期望列车位置作为控制输入,以期望列车位置和视觉仿真列车位置的误差作为控制反馈,通过调整比例(P)、积分(I)和微分(D)3 个控制参数,设计相应的控制器,对周期性获取的列车速度进行补偿,进而实现司机视角的列车位置动态跟踪。基于PID控制的司机视角同步跟踪显示原理见图4。
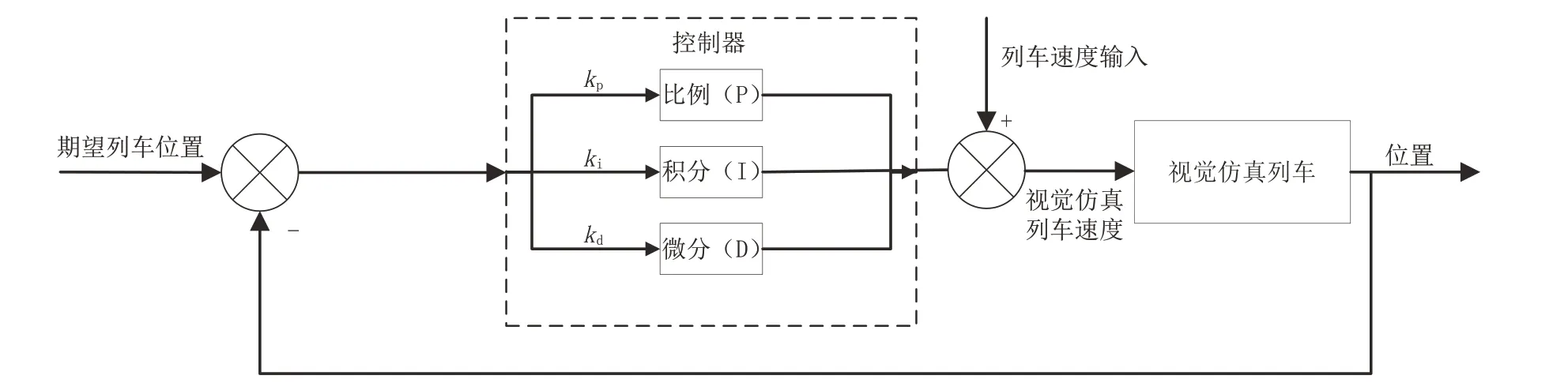
图4 基于PID控制的司机视角同步跟踪显示原理
司机视角的列车追踪显示对PID控制器有额外要求,相对于常规的控制系统会出现震荡的情况,在列车显示控制场景中,不允许出现控制指令的剧烈震荡,因为震荡过大可能意味着列车退行,这是不符合实际的;列车追踪显示反应要快速,过大的延迟会影响显示的实时性;控制器的输出变化应趋于平缓,尽量贴近于现实中列车加速的情景。司机视角同步跟踪的PID控制目标见图5。
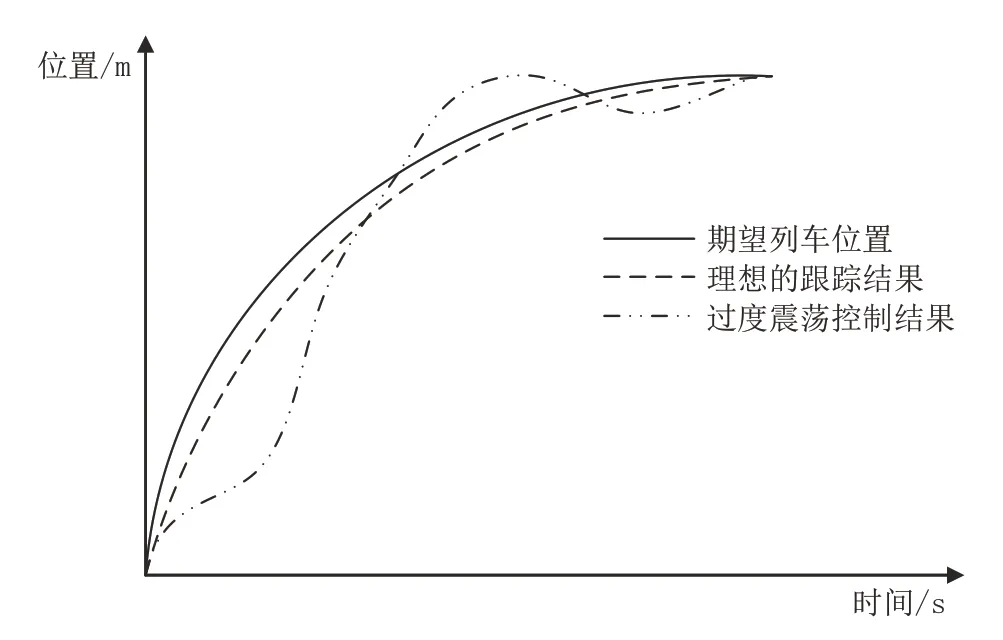
图5 司机视角同步跟踪的PID控制目标
控制器输出指令即为视听显示模块中仿真列车当前运行速度,通过调节PID的控制参数使其贴近ATP 实际运行速度,同时保证列车位置的正确跟踪。控制器应增加输出调节阀门,防止震荡(列车后退)、控制器输出变化过大(列车加减速度过大)等情况。
司机视角显示的仿真列车速度Vn为
式中:Sn为第n个周期的期望列车位置;Ln为仿真列车位置;vn为视听显示模块周期接收到的列车速度;kp、ki、kd分别为PID 控制器的比例、积分、微分参数。
3.2 算法验证
将培训平台软件中列车的加/减速度按照牵引/制动手柄的级位设置为恒定值,视听显示模块显示内容为简易的铁道环境,PID 控制器参数kp、ki、kd分别为1、0.000 000 1、0.08,并设置防回调、防过度调整等控制阀门,车载设备功能模块与视听显示模块采用用户数据报协议(UDP)通信方式,通信传输周期为500 ms。软件界面见图6。

图6 培训平台软件界面
在软件运行过程中,车载设备功能模块显示正确;拖动牵引手柄和制动手柄时,司机视角显示的加减速灵敏度高,位置基本准确;列车越过相关应答器组之后,会立即显示应答器报文中的公里标信息或站名信息等。软件运行结果表明,从视觉感官上看列车运行流畅、定位准确,可以满足司机培训需求。
为进一步验证基于PID控制的司机视角跟踪的准确性,设置基于速度的司机视角跟踪与基于PID控制的司机视角跟踪对比试验,根据记录数据,得出列车从0 km/h 加速到250 km/h,再减速到0 km/h 的过程中,司机视角列车位置跟踪曲线(见图7)和列车位置误差曲线(见图8)。
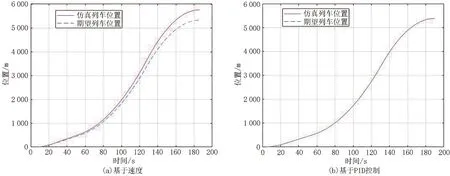
图7 司机视角列车位置跟踪曲线

图8 仿真列车位置误差曲线
从图7(a)可以看出,仅依靠实时速度来控制视觉列车的位置会导致误差较大,最后停车时,经计算,期望列车位置为5 327.4 m,而仿真列车位置为5 757.77 m,误差超过400 m,严重影响司机视角显示的真实性。从图7(b)可以看出,仿真列车位置与期望列车位置的曲线几乎重叠,表明应用PID控制后,仿真列车位置误差可以即时得到校正,保证了司机视角显示的真实性。
从列车位置误差角度分析,由图8(a)可以看出,列车在运行过程中,误差增大的速率与列车速度呈正相关,在前期加速过程中误差增长速率逐渐变大,在减速过程中误差增长速率逐渐减小,而误差仍在逐步扩大,直到最后停车,经计算,仿真列车位置与期望列车位置误差超过400 m;从图8(b)可以看出明显的误差校正过程,每一次的曲线震荡即为一次误差校正。虽然在整个加减速过程中,误差的整体趋势会随着速度的增大而增大,但即使在250 km/h 的速度下,误差也可以控制在8 m 以下。对于高速行驶的列车来说,8 m 的误差在视觉上可以忽略不计。而且在后续的减速过程中误差逐渐缩小,最终停车时误差控制在0.4 m 之内,可以满足司机视角列车位置跟踪显示的准确性要求。
4 结论
1)本文设计的培训平台采用真实ATP设备主机应用软件,培训平台与现场真实设备具有相同的操作反应。
2)基于运行脚本、软件插桩2 种故障注入方式实现了多种场景的故障模拟,其中,基于运行脚本的故障注入可对现场已发生的故障场景进行复现,基于软件插桩的故障注入可对车载ATP 设备可能发生的异常状态进行模拟。
3)基于PID 控制的司机视角同步跟踪显示算法,可以保证司机视角显示的准确性。
在此基础上可通过增加虚拟现实设备[19-20],进一步提升培训过程的沉浸感,实现低成本、高质量的ATP设备司机操作培训。