3D Localization for Multiple AUVs in Anchor-Free Environments by Exploring the Use of Depth Information
2024-04-15YichenLiWenbinYuandXinpingGuan
Yichen Li ,,, Wenbin Yu ,,, and Xinping Guan ,,
Dear Editor,
This letter investigates the cooperative localization problem for multiple autonomous underwater vehicles (AUVs) in underwater anchor-free environments, where AUV localization errors grow without bound due to the accumulated errors in inertial measurements(termed accumulated errors hereafter) and the lack of anchors (with known positions).Different from previous works, this letter is based on a message-passing distributed framework and the designed algorithm improves the localization accuracy mainly by the cooperation among AUVs and the use of depth information to mitigate the influence of the accumulated errors and harsh environments.Through simulations, the advantages of the proposed algorithm are verified by comparisons with different state-of-the-art alternative methods.
With the development of AUV technologies, multiple-AUV (multi-AUV) cooperative task execution has gradually become a trend [1].However, due to the complex underwater environments, AUV localization has always been a challenging problem [2].Usually, it is achieved with the assistance of anchors to obtain position reference information.Considering the limited coverage of current deployed underwater networks, AUVs should often work in anchor-free environments [3], and the error accumulation in inertial measurements would make localization errors grow unbounded [4].Under these circumstances, cooperation could be applied to improve the localization accuracy by exchanging information among AUVs [5].Recently, cooperative localization methods have been designed [3], [6], [7],among which belief propagation (BP) is commonly used for underwater scenarios due to its distributed nature and low complexity.Moreover, its extensions [8], [9] have verified their advantages in non-Gaussian nonlinear problems.However, most works rely on anchors to achieve accuracy improvement.In anchor-free environments,works [3], [10], [11] try to alleviate the localization degradation for AUVs by modifying the use of yaw angles.Although the designed strategies can also be applied to pitch angles, the method designed specifically for the error accumulation in them is still lacking.
In underwater anchor-free environments, in addition to inertial measurements, the depth is the only available absolute information that can be directly measured on board.Usually, depth measurements are used to correct the predicted AUV depths [3].Furthermore,with known depth information, many works have treated localization as a 2-dimensional (2D) problem [12].However, such a simplification cannot reflect the true conditions of the ocean [13].Since depth measurements could be proprioceptively obtained and do not contain accumulated errors, considering the information scarcity in anchorfree scenarios, exploring the use of depth measurements could be a viable way to improve the localization accuracy of AUVs.
This letter aims to improve the localization accuracy of multiple AUVs by designing a distributed cooperative localization algorithm,named cooperative localization aided by depth information (CLADI).The contributions of this letter are as follows: 1) In the designed position prediction, the misleading of the accumulated errors is corrected using depth measurements from different timesteps.2) The accuracy of relative information between AUVs is improved by compressing the particle coverage using depth information, and the proposed transmitted messages could adapt to the harsh underwater environments, such as sounding ray bending, asynchronization, etc.
whereιis also used to overcome the uncertainties caused by measurement biases and errors.The main idea that we extend the coverage of particles with (15) and (17) is that we would like to ensure part of the particles could be distributed near the true value even under the condition of unknown biases and errors.When the messages multiply as in (7), the particles near the true value would obtain higher weights and dominate the localization results.In this way, the influence of biases and errors can be alleviated.
By replacing the distance and direction particles in (13) with (15)and (17), the proposed message is obtained.Then, the belief can be calculated as (7).Details are described in [11].
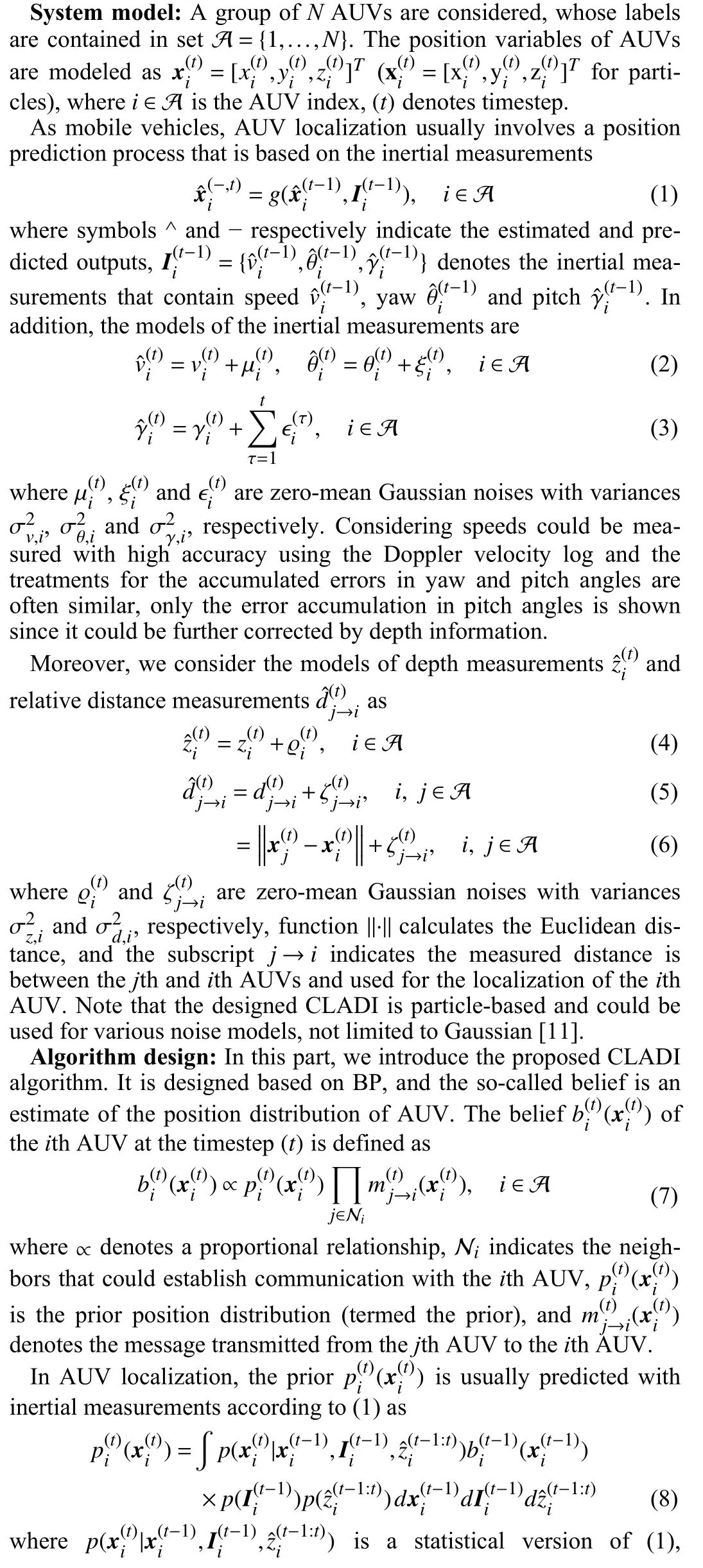
Simulationresults: Inthispart,we validatetheproposedCLADI algorithmthrough various simulations, where two600×600×400m3 scenarios are considered.In the first scenario, four anchors and a single AUV is involved to validate the effectiveness of the proposed message.The use of anchors is to avoid the influence of the accumulated errors.In the second scenario, four AUVs are used to compare the localization accuracy of CLADI with state-of-the-art alternative methods.In both scenarios, the speeds of AUVs are set to 5 m/s and the duration of navigation is 100 s.The variances of yaw, pitch,speed, depth, and distance measurements are 0.1, 12, 0.1, 1, and 4,respectively.The number of used particles is 200.The localization accuracy is measured by root-mean-square errors (RMSEs), which
Fig.1.RMSE comparisons.
are calculated through 1000 Monte-Carlo runs.
In Fig.1(a), different messages and two conditions, with or without measurement bias, are applied to validate the advantages of the proposed messages.The traditional message is generated with (12),and the converted message is a compressed version using depth measurements with (13).Fig.1(a) also demonstrates the effectiveness of(15)-(17) in the message design.When the measurement bias is not considered, the converted message enjoys a clear advantage compared with the traditional one due to higher particle resolution.In addition, the rough direction brought by (15) further reduces the coverage requirement of the message and accordingly improves the relative position information accuracy.Under the measurement-bias condition, the initial biases are set within 20 m and randomly grow with time.By involving the bias compensation (16), the error growth is alleviated.Moreover, through condensing the particle coverage and compensating the measurement bias, the proposed message, generated based on (15) and (17), could provide the best localization accuracy.
In Fig.1(b), the localization accuracy of different algorithms is shown.Dead-reckoning (DR) is noncooperative and directly uses inertial measurements to predict position estimates, which are seriously misled by the accumulated errors.Compared with DR, nonparametric BP (NBP) [8] and sigma point BP (SPBP) [9] improve localization accuracy by cooperation among AUVs.However, since the accumulated errors are not specifically considered, the improvement is limited.By involving depth measurements and the design in(11), a clear accuracy improvement of NBP is achieved and proves the validity of our design.In BPUCL [3] and UABP [10], the accumulated errors have been dealt with by compensation and expanding the particle coverage of the prior.However, the use of depth is not fully exploited.In CLADI, the proposed prior applies the pitch angle corrected with depth measurements and avoids the impact of accumulated errors.Combined with a growing particle coverage, CLADI provides the best localization accuracy compared with the aforementioned methods.
To further validate CLADI in practical uses, Fig.1(c) shows the localization performance when the accumulated errors are contained in both yaw and pitch measurements.Moreover, packet-loss conditions are also involved to simulate the effect of harsh communication environments and network changes, wherePLdenotes the probability that an AUV loses all the messages.As a result, the accuracy drop of CLADI is limited and it still provides better accuracy compared with others even under harsh conditions (PL=0.5 indicates the packet-loss probability of each communication reaches 0.8).
Conclusion: In this letter, multi-AUV cooperative localization in 3D anchor-free environments has been studied and a distributed message-passing localization algorithm named CLADI is proposed.In CLADI, the accumulated errors in pitch angles are corrected using depth measurements, leading to higher prediction accuracy.Depth information is also used to improve the relative position accuracy by compressing the space among particles.Moreover, measurement bias caused by harsh underwater environments is alleviated with a timevarying compensation strategy.Simulation results validate the superiority of CLADI by comparisons with the alternative ones.
Acknowledgments:This work was supported in part by the National Natural Science Foundation of China (62203299, 6237 3246) and the Oceanic Interdisciplinary Program of Shanghai Jiao Tong University (SL2022MS008, SL2020ZD206, SL2022MS010).
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- When Does Sora Show:The Beginning of TAO to Imaginative Intelligence and Scenarios Engineering
- Goal-Oriented Control Systems (GOCS):From HOW to WHAT
- Digital CEOs in Digital Enterprises: Automating,Augmenting, and Parallel in Metaverse/CPSS/TAOs
- A Tutorial on Federated Learning from Theory to Practice: Foundations, Software Frameworks,Exemplary Use Cases, and Selected Trends
- Cybersecurity Landscape on Remote State Estimation: A Comprehensive Review
- Data-Based Filters for Non-Gaussian Dynamic Systems With Unknown Output Noise Covariance