月球探测激光传能系统仿真软件设计
2024-04-12石德乐黄秀军王凯明侯欣宾
石德乐,黄秀军,王凯明,侯欣宾
(1.山东航天电子技术研究所,山东烟台 264670;2.钱学森空间技术实验室,北京 100094)
月球探测和开发利用是未来航天领域的重点发展方向,能源供给是任务顺利开展的关键因素。对于月球表面探测,由于月球的昼夜分别为14 个地球日,对于长达14 d 的阴影期,以及月球极区的永久阴影区供电目前仍是一个极大的难题,特别是南极长达半年的极昼、极夜现象,能源供给成为制约月球探测和开发利用的关键问题[1-2]。
激光无线能量传输可以实现对远端用电设备的非接触供电,是长距离无线传能的主要手段[3],具有损耗低、传输距离远、不干扰通信设施、能量密度高、尺寸小的特点,特别适合于真空环境中的远距离输能,有望成为未来月球探测能源供给的重要方式。月球激光传能主要应用模式包括:
(1)利用月球轨道器的激光无线传能装置,对位于月球南极区域探测的着陆器或者巡视器进行供电,同时利用激光光电接收端废热进行电子设备保温。
(2)利用大巡视器对执行南极区域永久阴影区探测的小型巡视器进行供电,开展月坑或者月球溶洞的探测任务实验。
激光传能系统组成如图1 所示,以高能量激光束作为能量载体,经准直光学系统发射,在远端通过激光电池阵列将光能转化成电能。

图1 激光传能系统组成
月球探测激光无线能量传输系统需要根据传输距离、需求功率大小,以及载荷轻量化、小型化的约束条件,综合考虑激光波长、激光器效率、光束质量、发射光学系统的尺寸、工作角度范围,以及接收激光电池的转化效率,进行系统优化设计。文中主要针对月球探测激光无线能量传输系统,以激光无线能量传输全链路系统仿真为核心,结合激光无线能量传输的应用场景,建立了仿真模型并开发了仿真软件,为月球激光传能系统的设计提供仿真数据支撑。仿真软件采用模块化设计方法,能够进行图形交互,并可方便进行软件的扩充、增删及优化改进。
1 仿真软件需求分析
从工程设计与实施角度,分析月球轨道激光传能仿真软件的需求。具体包括:
(1)仿真模块作为月球轨道激光无线能量传输演示软件的组成模块,主要与月球轨道激光无线能量传输可见性分析模块、空间激光无线能量传输激光器性能仿真模块共同实现月球轨道航天器向月表探测器进行无线供电过程的仿真。
(2)由月球轨道激光无线能量传输可见性分析模块提供不同轨道高度的可见性。
(3)空间激光无线能量传输激光器性能仿真模块提供激光器输出光学参数。
(4)可进行接收端整个轨道周期内的能量平衡分析。
(5)可进行激光无线能量发射、接收及管理等全链路的功能仿真。
(6)可以利用交互式图形界面,在仿真软件中选择系统变量,配置各种模块参数,仿真不同系统条件对激光能量传输性能的影响。
2 仿真软件架构
月球轨道激光无线能量传输演示软件架构如图2 所示,主要包括月球轨道激光无线能量传输可见性分析模块、总体系统仿真模块、激光无线能量发射模块、激光无线能量接收模块、能源管理系统仿真模块、APT 仿真模块等组成。各个模块的仿真结果作为下一个模块的输入。
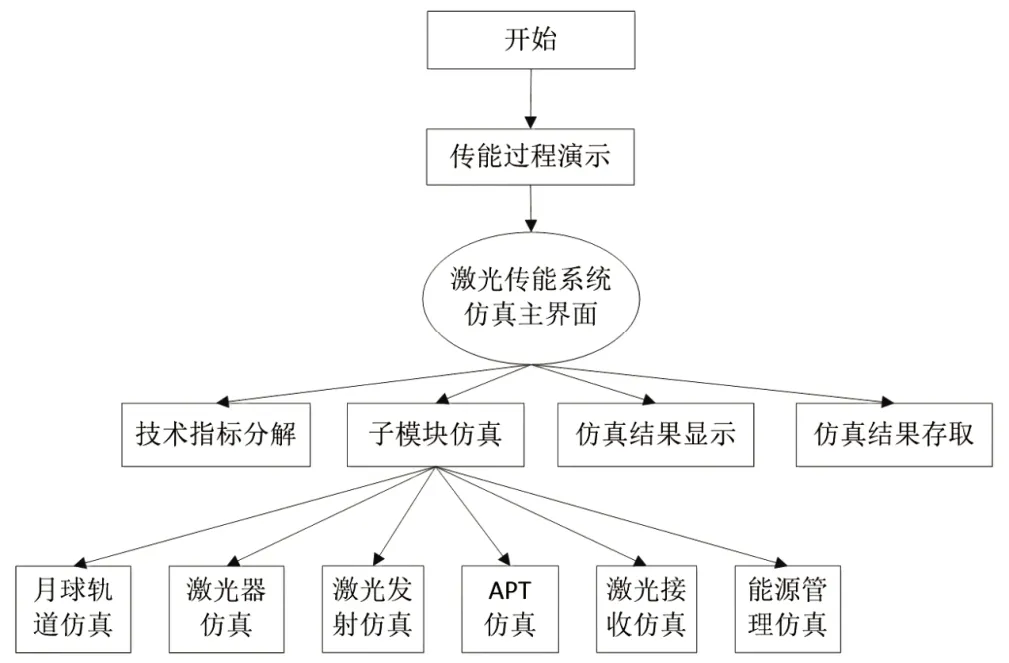
图2 激光传能仿真软件架构
演示软件采用MATLAB2010b 编写,采用第三方开发的软件仿真数据需要嵌入到MATLAB GUI界面中,能够进行数据交互。程序运行过程如下:(1)首先进入月球轨道激光传能过程演示程序;(2)进入激光传能仿真系统主界面。
在主界面下,通过输入设计参数,进行技术指标分解,分解的计算参数将送入各个功能模块进行仿真,各功能模块再将计算结果返回主界面,并进行仿真结果的数据和仿真曲线的显示,以及仿真结果的存取等。
3 仿真软件设计
3.1 过程演示程序设计
过程演示仿真软件界面如图3 所示,主要进行月球轨道卫星对月球车激光传能过程演示,月球轨道卫星在绕月球运动过程中,不间断地对月球车进行能量传输,可保证月夜条件下月球车正常供电。

图3 传能过程演示程序界面
软件功能主要包括:(1)调用月球、月球车、卫星三幅图像;(2)进行卫星旋转角度的计算;(3)进行相应位置卫星图像的显示以及传能激光光线的绘制,进行过程演示;(4)检测按钮情况,进行响应,执行相应的函数。
3.2 主界面程序设计
仿真软件主界面如图4 所示,可以进行各个仿真模块的功能选择,可作为各个仿真模块的入口程序,能够进行人机交互,进行设计参数的修改。
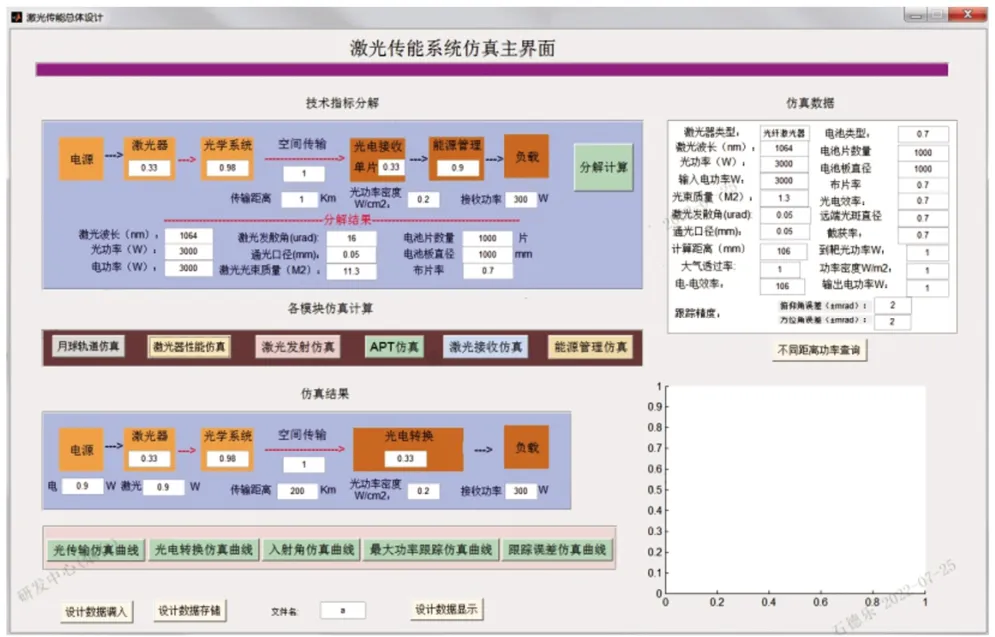
图4 仿真系统界面
软件功能主要包括:根据系统对传输功率、传输距离的要求,分解相关技术指标;根据各个模块仿真数据,显示最后仿真结果;存取仿真数据。
3.2.1 技术指标分解模块
(1)根据最大传输距离,接收电功率要求,进行传能效率链的分析。
(2)进行激光器的选型、激光功率大小的确定,光束质量、转换效率等设计参数的设定,为激光器仿真模块提供输入参数。
(3)根据传输距离,接收电池板大小进行激光发散角度的计算,为激光发射模块提供发散角输入条件,进行发射天线直径等参数的计算。
3.2.2 仿真计算模块
调用各仿真模块,可以进入不同的仿真程序,进行各子模块的仿真。
3.2.3 仿真结果显示模块
(1)仿真数据显示
将仿真获得的数据在主界面上显示,通过改变输入传输距离可以显示不同设定距离下的仿真结果。
(2)仿真曲线显示
通过各个仿真曲线显示按钮,可以将激光传输、光电转换等不同的仿真曲线进行显示。
3.2.4 仿真数据存取模块
将仿真数据进行存取,键入文件名,可将仿真结果以*.Mat 格式存储在月球轨道激光无线能量传输仿真软件文件夹下。通过调用函数,可以将存储数据进行显示。
3.3 功能模块设计
3.3.1 激光发射仿真程序
发射激光在一定距离上的光斑大小由光学系统的发射口径、发射光路束散角和传输距离决定,而发射光学系统的特性与输入激光器的光学参数有关,特别是激光光束质量,包括光纤芯径、M2、BPP、β 值等[4-5]。
假定激光器输出尾纤的光纤芯径为ϕ,光纤数值孔径为NA;发射系统焦距为f,通光口径为D,发射系统光束束散角为θ;靶面与发射光学系统间距为L,形成直径为d的光斑,发射光学系统的束散角可由式(1)确定:
发射光学系统的通光口径由光纤数值孔径和光学系统等效焦距决定。
根据光束传播原理和经验公式可知,在距离为L的靶面上,光斑尺寸由光学系统的发射束散角、通光口径和传播距离等决定,如式(3)所示:
激光发射仿真程序主要功能如下:
(1)设计参数调入功能:将所需设计参数调入软件界面并显示。
(2)发射光学系统设计仿真:直接打开光学设计仿真软件Zemax,进行光学系统设计。
(3)光束传输仿真功能,可根据光纤芯径、M2、BPP、β 等不同光束质量表示方式进行光束传输设计仿真。
(4)能够计算高斯光束传输过程分布情况。输入传输距离参数,进行光斑形状显示。
仿真程序界面如图5 所示。

图5 激光发射仿真程序界面
3.3.2 APT 仿真程序
激光无线能量传输具有方向性强,波束窄的优点,非常适合远距离的无线能量传输应用。然而,发挥激光这些优点就需要激光能量发射端具有较高的光束指向控制能力,实现能量光束对接收终端的精确瞄准、捕获和跟踪[6]。高精度的光电跟踪设备,一般采用粗瞄装置和精瞄装置协同工作的复合轴控制系统实现瞄准、捕获及跟踪(APT),如图6 所示。
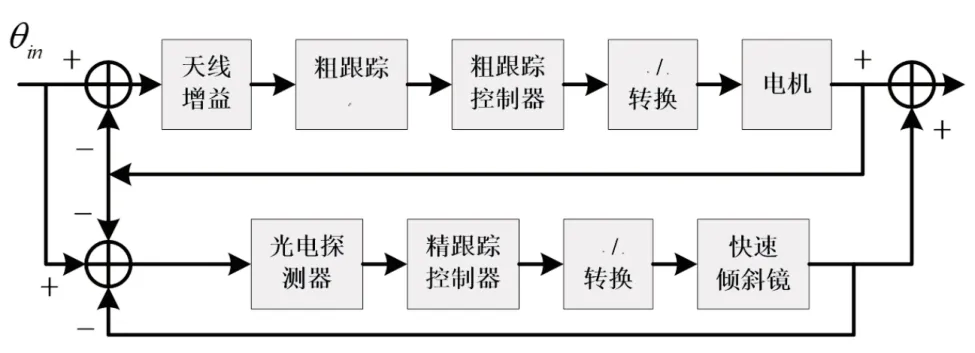
图6 APT系统框图
跟踪探测采用两个分离的粗、精探测器实现,由粗跟踪环来完成大范围天线调整与跟踪控制光斑脱靶量,将光斑脱靶量作为控制系统输入量,经过控制系统调节后,驱动指向机构调节跟踪光斑,使其进入精跟踪视场;精跟踪环以粗跟踪伺服反馈误差信号作为输入信号,对该误差通过反馈控制实现校正,通过电压驱动快速倾斜镜精跟踪机构,将光束约束在精跟踪探测器视场的中心,实现对准。
APT 仿真程序主要功能如下:
(1)根据月球轨道、输入时间、月球地面站位置,进行轨道器动力学的仿真,输出卫星轨道六根数或者惯性坐标系的坐标位置,进行坐标变换,获得对准角度,并计算对准角度误差。
(2)具有目标捕获仿真功能,通过设定不同的运动参数,进行不同形式的扫描仿真,并对扫描时间以及扫描的漏扫率进行统计。
(3)建立粗跟踪和精跟踪Simulink 仿真模型,并进行跟踪过程的动力学仿真,输出仿真误差。
(4)对整个系统的瞄准误差进行统计。具有信标光图像仿真功能,能够进行最优阈值求取、图像分割、图像标记等。
(5)进行仿真数据的存取。
仿真程序界面如图7 所示。
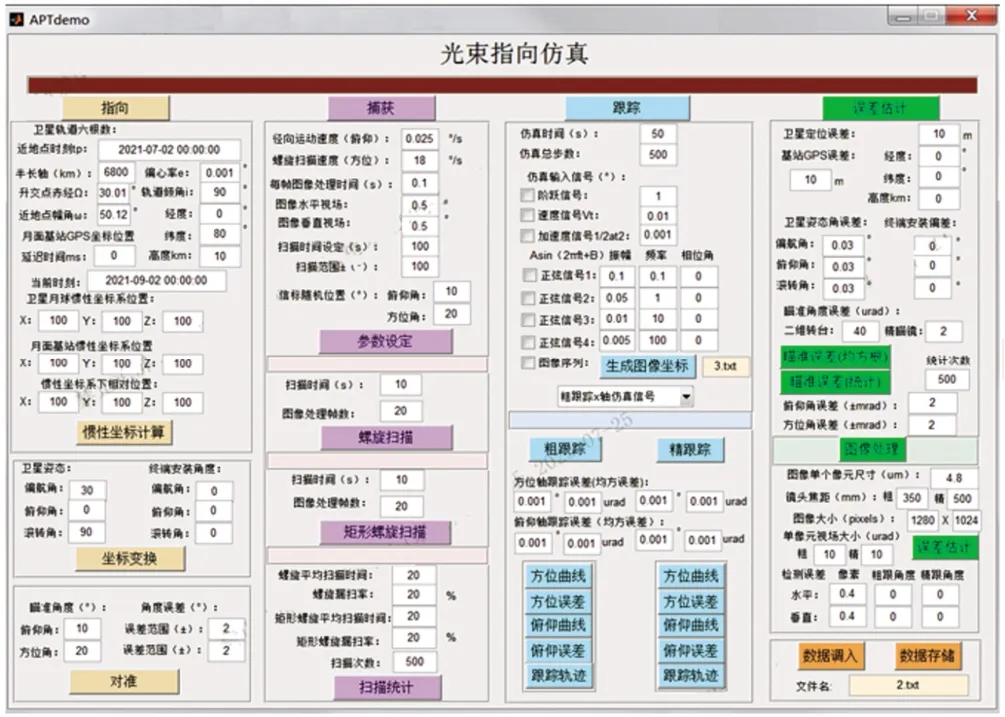
图7 APT仿真程序界面
3.3.3 激光接收仿真程序
光电转换单元是激光传能系统的核心部件,其主要任务是将能量光束传递的能量高效率地收集,转化为电能。光电池板是光电转换单元的主体,它将激光光能转换为电能,实现对锂电池的充电[7-9]。
光电池转换效率与入射光强的关系可以表示为:
式中:Jph(λ)=SR(λ)qSR(λ)为光谱响应系数;φ(λ)为入射光强;I0为pn 结反向饱和电流;S为光斑面积;W[]为Lambert W 函数。
激光接收仿真程序主要功能如下:仿真数据的调入;电池片布局设计,包括方形布局和圆形布局形式,并计算转换效率;计算不同距离下光电转换效率;仿真不同入射角度下激光电池光电转换;仿真高斯光束光电转换;仿真接收效率与瞄准精度、温度等影响因素之间光电转换。
仿真程序界面如图8 所示。
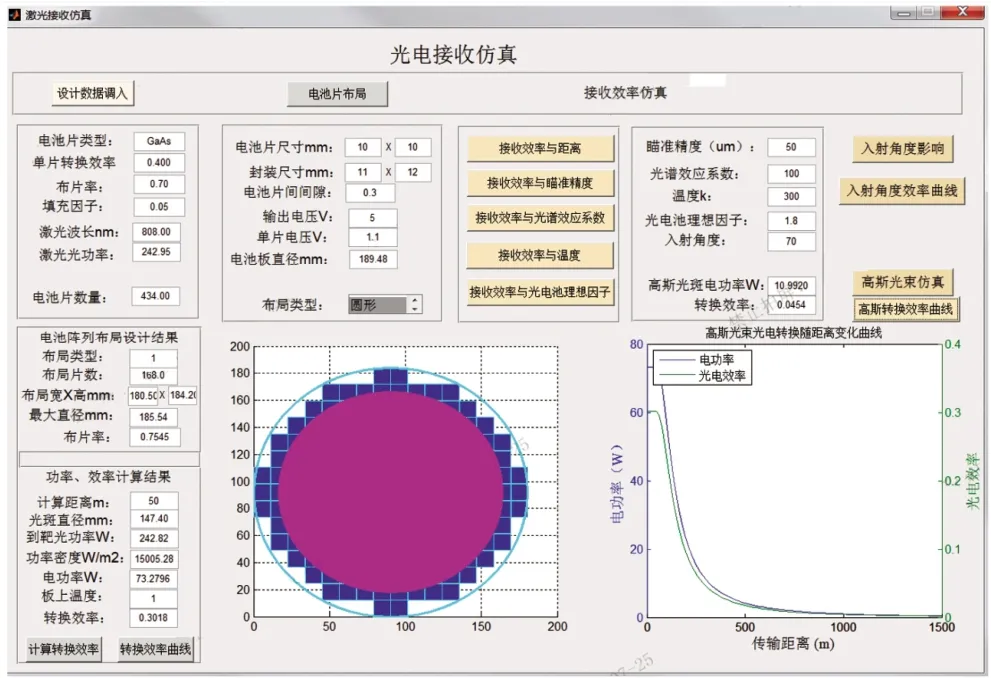
图8 激光接收仿真程序界面
3.3.4 能源管理仿真程序
能源管理系统起着调节能量接收、储能和负载之间功率平衡的作用,承担着为负载提供稳定一次母线、为蓄电池提供充放电管理功能的重要任务,是负载接收设备全寿命周期内稳定运行的重要保障。
光电池阵列在光照强度相同、功率曲线为单峰值情况下,利用扰动观测法、电导增量法等传统MPPT 算法可以准确、快速地寻找到最大功率点。然而当采用激光进行能量传递时,受到距离、温度、照射角度、照射范围以及激光强度均匀性等多方面影响,特别是激光光斑不均匀或者局部阴影条件下,光电池阵列内阻的非线性特性会更加复杂,导致P-V功率特性曲线出现多个功率峰值点,在这种情况下采用传统MPPT 算法,容易导致光电池阵列工作在局部最大功率点,降低了光伏电池利用率。基于以上分析,能源管理仿真可进行不同的MPPT 方法仿真来进行验证。
能源管理仿真程序主要功能如下:调用Simulink仿真软件,进行不同最大功率跟踪算法仿真;建立光电池仿真模型;开发不同最大功率跟踪算法并进行仿真;进行光电池阵列的仿真。
仿真程序界面如图9 所示。
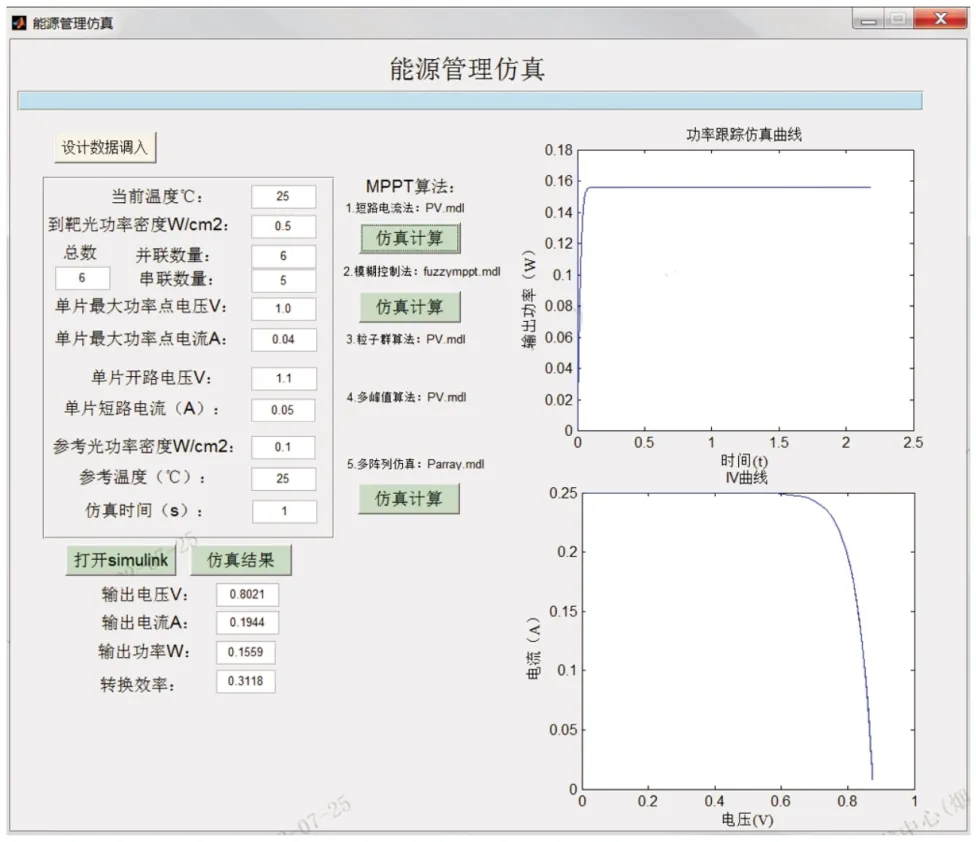
图9 能源管理仿真程序界面
4 月球激光传能系统设计实例
月球南极永久阴影区探测是未来月球探测的重点之一,永久阴影区全年内没有任何太阳光照,环境温度极低,为了实现永久阴影区的探测,必须采用同位素核电源或者采用无线能量传输方式为探测器进行连续供电,如图10 所示。利用激光传能系统仿真软件开展月面激光无线能量传输仿真,可为月表激光传能系统设计提供参数依据。
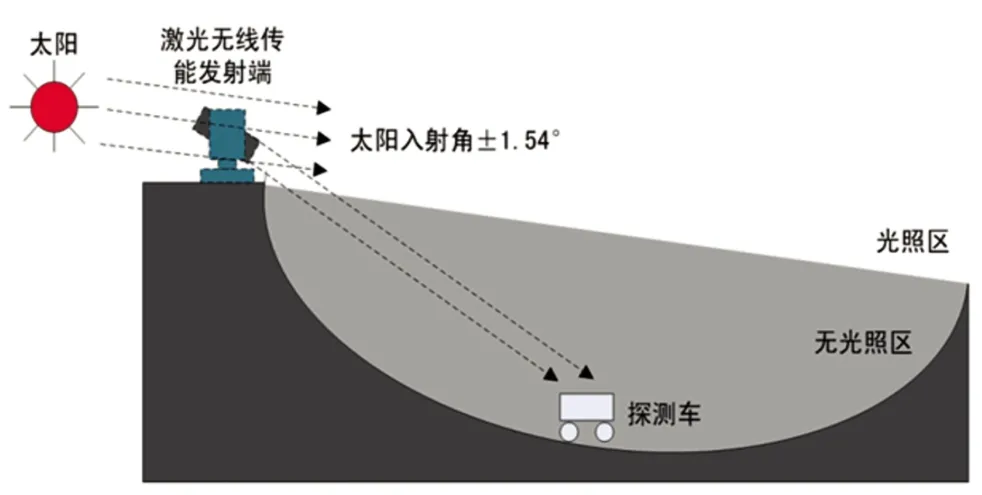
图10 基于激光传能的月球阴影区探测
以实现月面传输距离≥1 km,接收电功率≥300 W 为主要技术指标进行系统仿真和设计,仿真过程中,通过设定激光器电光效率、光束质量、光电转换效率等参数进行技术指标分解,通过调用各个仿真模块进行仿真、参数优化设计,最后得到仿真结果数据如图11 所示。

图11 月面激光无线能量传输仿真数据
传输路径中激光光斑和接收电功率随传输距离的关系如图12 所示。随着传能距离的变化,远场光斑直径逐渐变大,光功率密度随之降低,但在1 km 范围内,获得的电功率有一定程度降低,但满足300 W的电功率传能要求。

图12 月面激光无线能量传输仿真曲线
APT 系统中捕获以及跟踪误差仿真如图13 所示。经过随机过程统计,俯仰和方位角度的跟踪误差在80 μrad 范围之内,相应光斑对准误差在80 mm以内,对光电接收的影响很小。
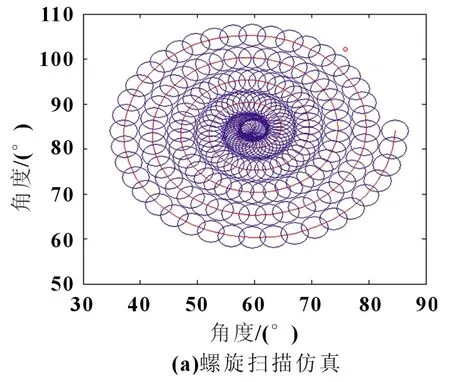
图13 APT仿真曲线
根据仿真结果,将选用输出光功率1 100 W 的半导体激光器,发射系统口径200 mm,接收电池板直径1 000 mm 的激光传能系统,可满足大于300 W 电功率的设计要求。
图14 为月面激光无线能量传输系统设计。
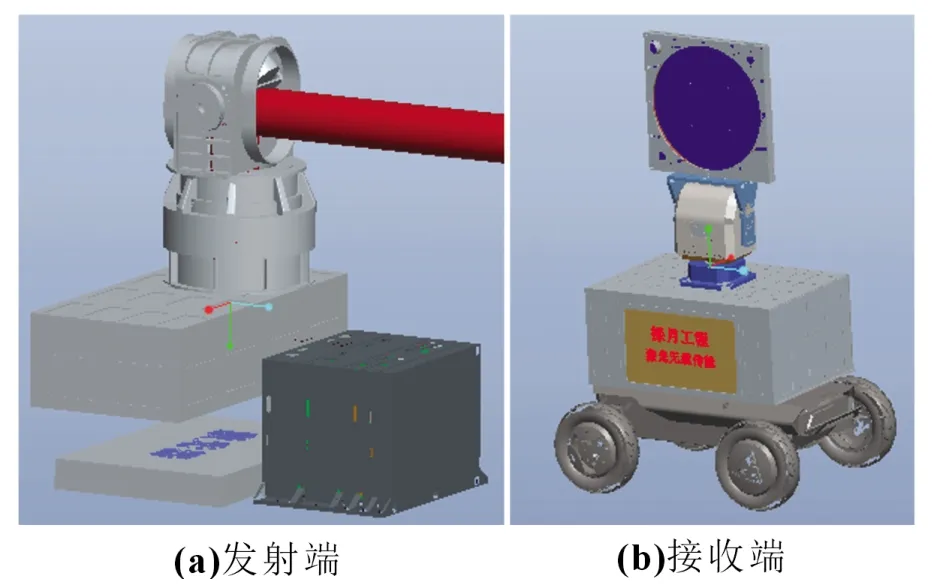
图14 月面激光无线能量传输系统设计
5 结论
根据月球探测对激光无线能量传输的应用需求,针对月球轨道以及月面科研站等激光传能应用场合,开发了全链路激光无线能量传输仿真软件,对激光传能链路中激光发射、传输、光束控制、光电转换、能源管理等环节进行建模和仿真验证。并基于该软件进行了月面激光传能系统仿真计算,仿真结果可以为激光传能系统的设计提供理论依据和设计输入。
