智能塔式起重机关键特征与远程遥控系统技术分析
2024-04-10伍步胜
伍步胜
(中海石油(中国)有限公司深圳分公司惠州作业公司,广东 深圳 518000)
起重机广泛应用于厂房、车站、仓库、高层建筑、海港码头、海洋石油钻井开采等场合,并呈现出大吨位、高效、自动化和多用途的发展趋势。与此同时,人们对其工作稳定性、运行安全性、智能化水平、动作安全可靠性、机械设备故障监测检测水平等方面的需求也在不断提升。智能工程机械涉及机、电、水,声、光等领域,以机器科学技术、现代微电子科学技术、感应器科学技术等为基础,与各种信息技术结合,实现机器内部的信息处理功能,而智能起重机属自动化施工机械设备中的一类,对现代智能起重机控制系统开展深入研究有着重大的研究价值和意义。
1 智能塔式起重机的特征及优势
智能塔式起重机则是指塔式起重机具备高灵敏度的智能化操作体系,所有工作能够实现高度自动控制的设备,具有机械动作和运动特性、可编程功能、人机交互能力以及自检测能力。智能塔式起重机主要由起重机基本动作层、传感器层,信息采集与执行层,控制系统层以及人机交互技术层等构成。随着人工智能的发展,智能起重机还具有认知能力,计算技术、运动能力、协调能力,认知能力和决策控制功能等。
与传统起重机相比,智能起重机主要具备以下几大优势。(1)可视化及远程控制技术。可视化可以对装置工作状况进行即时观测,采用了无线通信技术和硬线联网方法,协助作业人员完成远程管理,做出正确判断与动作。(2)完备的数据采集与故障记录技术。起重机上的各项参数十分繁杂,智能塔式起重机通过微处理器、大容量存储器技术和图形液晶显示屏技术等,迅速搜集数据并进行分类处理,帮助作业人员迅速完成对设备状态的评估。(3)防摇摆技术。起重机工作过程中,吊钩的摆动直接影响着作业安全与作业质量。智能控制系统能够通过监测货物的位移状况,并通过加速度、减速度等对系统做出补充修正,以防止或者降低货物的摇晃,让作业更高精准。(4)智能化的电动机拖动系统。使用更可靠的变频调速控制器,达到对力矩更迅捷的反馈和对旋转频率的准确监控。
2 目前智能起重机远程遥控系统的发展现状
2.1 智能起重机应用领域不断增大
随着自动化码头的兴建,龙门起重机、轨道车等应用越来越多,智能起重机可以说无处不在。从中国第一个自动散货港口上海罗东冈,到韩国釜山新港的73台智能化无人轨道起重机装置和19台岸边电动手推车,再到台湾台北港区的40个智能化无人轨道手推车装置、港口全自动卸船机械、全自动堆取料机和全自动装船机械,都能够使用远程中央监控来实现无人化和自动化作业。
大型货仓中的智能起重机数量也越来越多,通过无人驾驶的高架起重机来自行存取负物。比如,河钢唐钢集团和韩国Posco集团合作开发的唐钢高强度汽车面板项目轧后仓库无人值守天车管理系统,已经完成了调试。宝钢宝信和运输处附近的21座码头自动化库,已经实现了全自动化的无人仓库控制。
2.2 智能起重机远程遥控系统不断创新
智能起重机的远程遥控系统是其在特点环境中完成作业任务的必要条件。在易塌方区、易燃爆区、环境恶劣作业区、视野不佳作业区,都需要通过无线遥控装置机器设备和仪器进行精确控制,完成相应的机械操作便捷化。目前,世界经济强国对远程遥控技术进行大力研究,在微动控制、复合动作、工作范围、可视化遥控等方面取得了很大进展。我国虽然工业远程遥控系统的研究起步较晚,但随着经济与技术的发展,很多工程机械厂商和高校、科研所展开合作,在智能起重机远程遥控系统开发方面,也取得了越来越多的研究成果。目前,国内外比较有代表性的远程遥控系统装置如表1所示。

表1 智能起重机无线遥控系统
3 智能塔式起重机远程遥控系统设计与关键技术分析
3.1 远程遥控系统总体方案
塔式起重机远程遥控系统的设计,主要包括三大机构动作控制系统、安全监控系统和人机交互界面设计。
(1)三大机构动作控制系统。采用PLC控制器完成对三大机构的智能控制,通过变频器控制减少机械损耗,提高工作效率。采用CAN总线的通信方式实现对PLC和变频器的连接。通过这种方案能够实现在线编程和故障诊断,还便于后期多个变频器的共同作用。

图1 三大机构控制设计
(2)安全监控系统。安全控制系统是采用计算机技术、自动控制技术、传感器技术等,来采集数据,进行数据处理。安全监控系统的作用包括对起重机的重量、吊钩幅度、回转机构以及风速等进行监控,将计算结果反馈操作者;通过远程监控平台,实现对起重机实时数据的获取,对其进行相应控制。
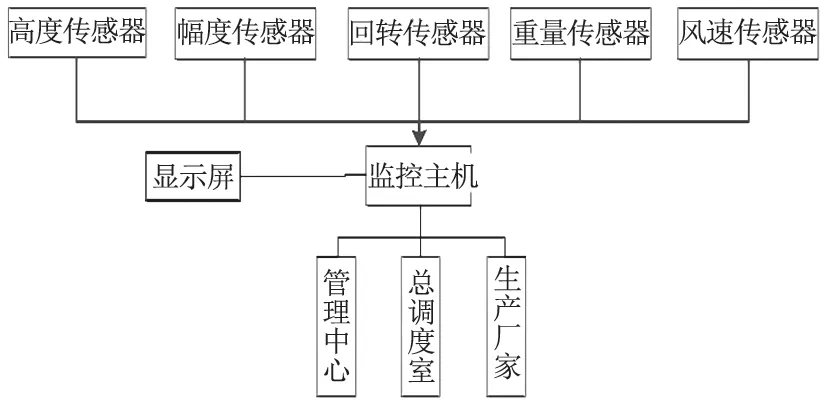
图2 塔式起重机监控系统设计
(3)人机交互界面设计。很多厂商的智能起重机都是利用工业触摸显示器作为信息交互平台,来完成控制系统与设备的信息双向交互。通过主界面和系统设置,进行系统查询和控制交互,交互内容包括重量、幅度、力矩、额定重量、风速、等安全相关的参数,以及设备运行速度、频率等相关的参数,还包括动作逻辑、保养维护、故障预警等专家诊断相关的参数。
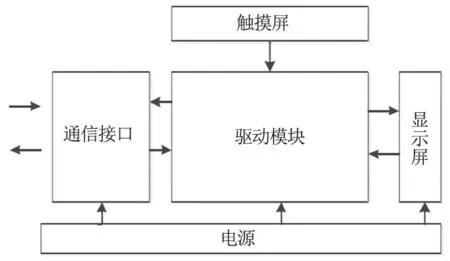
图3 人机交互界面设计
3.2 远程遥控系统关键技术分析
(1)人工智能技术。起重机的智能控制分为模糊推理、神经网络操控与人工智能驾驭技术的融入,具体如模糊操控和变结构操控的集成;神经网络与变结构操控的融入:模糊操控和神经网络操控的融入;各种智能计算方法的融入等。各种机器学习算法的诞生,推动着现代计算机的进步发展,该类技术在远程遥控系统中的应用也越来越多。比如,强化机器学习、蚁群计算、粒子群算法、遗传算法等,可广泛应用于智能启动设备系统,使系统产生近似人体或哺乳动物的自主学习智能,以应对越来越复杂、不明确和非结构化的环境。
(2)多传感器信息融合技术。高性能传感器的研制与发展对智能起重机可以应对不同的条件而进行灵活的工作必不可少。在人工智能过程中,增强和改善传感器特性是增强人工智能的关键部分。但是,怎样与来自传感器的数据,包括传感器的数据集成,成为一项非常重大的问题。多功能传感器的集成在起重机的智能实现中起着重要作用。
(3)人机交互技术。智能人机接口对人机交互技术的要求正在朝着精细化、多本地化、高智能化和人性化的方面发展。远程遥控系统的核心问题之一就是实现人机界面的高可用性和可靠性。根据高速、精密、数字化和智能化要求,人机交互技术包括检测系统与传感器信息融合技术、智能管理与远程控制、先进功能组件、新型数字驱动系统、高速和精密的数据传输机制、开放式网络控制器等先进的基本组件与系统。
(4)智能路径规划技术。最优路线设计是指基于某些原则或某种最小目标(如最小工作成本、最短行走路径、最短行走时限等),从目标空间内寻找从初始状态至最后目标阶段的最优或次优路径,可以用来避免障碍和提高工作效率。路径规划方式包括全局路径规划和局部整体路径规划。由于原有的路线规划方式在路线搜索效能和路线优选方面都需要提高。所以,必须根据不完整或不确定的环境条件信号,将遗传算法、粒子群算法、模糊逻辑和神经网络等智慧计算方法运用到路径规划,并研发出新的智能路径规划方式,以进一步提高智能起重机路线计划的避障准确度和工作效率高,从而更符合现实应用的需求。
(5)智能结构优化设计技术。尽管智能起重机的机械结构优化设计问题已成为科研的重点,但由于机械结构优化设计问题的复杂性、多目标功能、多法律约束力、多参数特性及其机械优化模型的广泛含义,导致优化设计问题数学模型的构建与解决造成了极大障碍。所以,需要选择一个计算简便、运算效率高、容易实现的新型智能优化计算系统,对起重机金属结构进行优化设计。这是目前智能起重机结构研发的一条关键思路,是智能起重机与无人起重机之间的智能协同设计的未来发展重点。
4 结语
智能塔式起重机的基础技术已经成熟,应用范围也日益增大,特别是在恶劣环境如钢铁、化工、海上设施等生产场所,有很大的推广和应用空间。目前,起重机的智能发展还需要进一步将人工智能的检测、管理、控制和结构设计技术进行整合,建立基于计算机控制的可重构模块化系统。要进一步探索其系统的设计理论与应用技巧,加强运动学、动力学、技术规划、控制等方面的研发,以促进智能起重机的创新发展。
