飞秒相干反斯托克斯拉曼散射光谱测温研究进展
2024-04-08张志斌邓岩岩刘照虹王雨雷吕志伟夏元钦
云 胜, 章 媛, 张 盛, 张志斌, 邓岩岩, 田 亮, 刘照虹,刘 硕, 张 勇, 王雨雷, 吕志伟, 夏元钦, *
1. 河北工业大学先进激光技术研究中心, 天津 300401
2. 河北省先进激光与装备重点实验室, 天津 300401
3. 河北工业大学能源与环境工程学院, 天津 300401
4. 哈尔滨工业大学可调谐激光技术国家重点实验室, 黑龙江 哈尔滨 150001
引 言
近些年, 随着超短脉冲激光技术的不断发展与成熟, 其在研究分子超快动力学[1], 生物显微成像[2], 以及燃烧诊断等领域得到广泛的应用, 特别是在高温湍流燃烧场的温度测量中, 具有重要的应用价值。 当今世界大约90%的能量供应都是由燃烧生成的。 目前, 对于高温燃烧场常用的非接触式测温方法中主要为辐射法测温和光谱法测温。 辐射测温法响应速度快, 灵敏度高, 能够较好地实现对高温目标、 较小目标的温度测量, 目前已经应用到城市生活垃圾和木材燃烧火焰以及火箭燃烧室的温度测量[3-5]。 基于激光光谱的测温方法中, 飞秒相干反斯托克斯拉曼散射(coherent Anti-Stokes Raman scattering, CARS)测温技术以其准确度高、 灵敏度好、 测量温度范围大、 时间分辨率高、 空间分辨率高等特点, 被应用于湍流、 高温、 超声速变化等复杂恶劣的燃烧环境中。 本文对飞秒相干反斯托克斯拉曼散射测温技术在各种燃烧场中的测温应用研究进展进行了综述, 期望能够为高温湍流火焰温度的测量方法提供参考。
1 飞秒CARS光谱测温技术的基本原理
飞秒相干反斯托克斯拉曼散射测温技术的主要步骤包括建立CARS光谱理论模型、 搭建CARS光谱测温实验系统, 并获得测量目标的CARS光谱、 对理论光谱模型和实验光谱进行拟合得出温度信息。 理论上通常建立N2、 H2、 CO2等燃烧过程中常见气体的CARS光谱理论模型, 并使用遗传算法与在实验中以相应气体为探针获得的CARS光谱进行拟合。
实验中, CARS信号的产生需要满足两个条件: 一是能量守恒条件, 即产生的CARS信号光和三束入射光之间的频率要满足ωCARS=ω1-ω2+ω3能量守恒条件; 二是动量守恒条件, 又称为相位匹配条件, 相位匹配条件是否满足是能否实现信号高效输出的关键。 CARS的能级图如图1所示, 图中ωpump为泵浦光频率,ωstokes为斯托克斯光频率,ωprobe为探测光频率, 探测光频率可以和泵浦光频率相等, 即ωpump=ωprobe。

图1 CARS过程的能级跃迁示意图
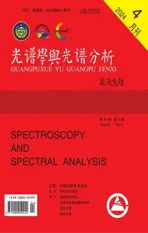
产生CARS信号的过程如下: 泵浦光和斯托克斯光同时到达探测样品, 泵浦光把粒子从基态1激发到虚能级1’, 在斯托克斯光的作用下, 产生受激拉曼散射, 粒子从虚能级1’跃迁到第一激发态2, 在探测光的作用下, 粒子从第一激发态跃迁到虚能级2’, 紧接着粒子从虚能级2’弛豫到基态1产生CARS信号。 在实验中常用的相位匹配方式为图2所示的折叠BOXCARS相位匹配方式。 这种空间相位匹配方式于1978年由Eckbreth等[6]完善, 该相位匹配方式进一步实现了CARS信号出射方向与入射光在三维空间上的分离。
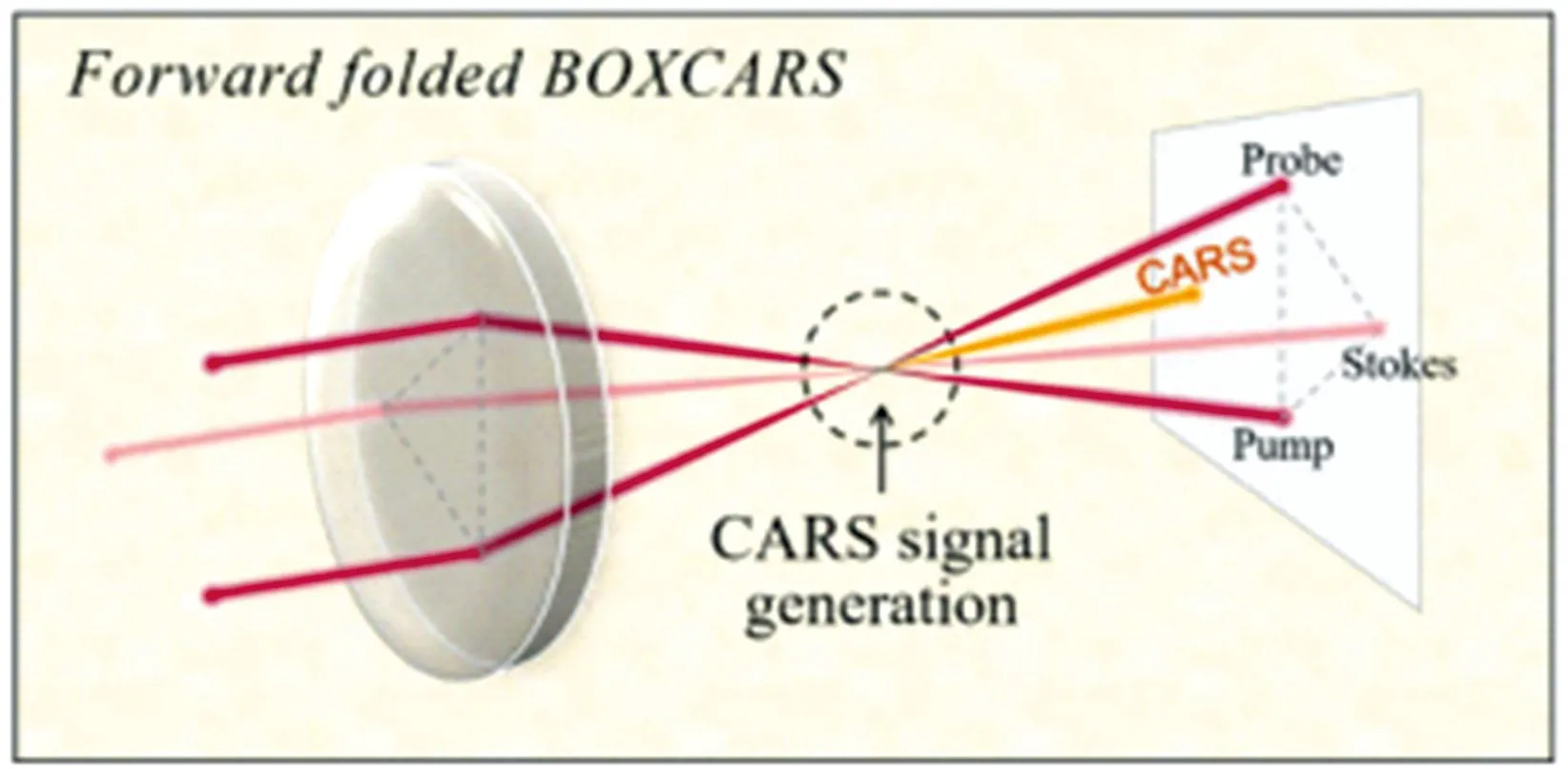
图2 CARS相位匹配示意图[7]
2 飞秒CARS光谱测温技术应用
2.1 飞秒时间分辨CARS光谱测温技术应用
飞秒时间分辨CARS典型实验装置如图3所示, 泵浦光、 斯托克斯光和探测光经过电动平移台后到达透镜, 经过透镜的聚焦作用, 三束光聚焦到样品上, 泵浦光和斯托克斯光激发样品的拉曼振动模, 探测光对拉曼振动进行探测。 飞秒时间分辨CARS光谱就是通过调节探测光到探测样品的延迟时间来实现的, 每改变一次探测光的延迟时间, 记录一次CARS信号的强度, 记录的CARS光谱强度随探测光延迟时间的变化曲线即为飞秒时间分辨CARS光谱, 光谱的变化趋势体现样品的温度信息。 2001年德国马克普朗克研究所开始应用飞秒时间分辨CARS光谱进行火焰温度测量[8]。 随后, 该课题组在这一领域开展了较多的理论和实验研究工作, 测量了一个大气压条件下, Hencken标准燃烧器氢气/空气绝热火焰温度。 此外还测量了CO气体对N2分子时间分辨CARS信号的影响等。 2012年哈尔滨工业大学可调谐激光技术国家重点实验室夏元钦课题组利用飞秒时间分辨CARS光谱测量了大气条件下甲烷/氮气/氧气火焰温度, 实验结果拟合较好并体现出良好的重复性[9]。
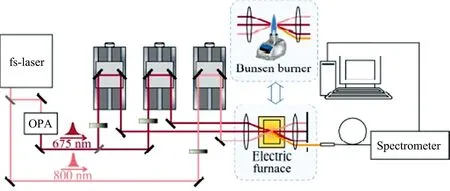
图3 飞秒时间分辨CARS实验装置示意图[7]
由于飞秒时间分辨CARS技术在进行温度测量时需要多次延时, 多次取点, 需要一定的时间积累, 不能测量燃烧的瞬态过程, 因此, 利用飞秒时间分辨CARS对气体燃烧测温的研究较少, 这一技术主要应用于研究超快动力学过程。 对于这一缺陷, 科研人员又提出了飞秒单脉冲CARS测温技术, 可以实现对瞬态燃烧场进行温度测量。
2.2 飞秒单脉冲CARS光谱测温技术
2002年德国马克普朗克研究所Lang等[10]开创性地提出了利用飞秒激光单脉冲CARS光谱测温的可行性。 飞秒激光器产生的脉冲宽度一般在100 fs左右, 频带宽度约几十纳米(约200 cm-1), 将飞秒脉冲作为泵浦光和斯托克斯光同时使用时, 泵浦光不同频率分量与斯托克斯光不同频率分量间具有相同的频率差, 可实现对同一跃迁的同步多重激发。 同时, 泵浦光某一单一频率分量也可与斯托克斯光不同频率分量间满足宽带CARS的激发条件, 这种无需通过扫描斯托克斯频率就可以实现分子不同振转拉曼跃迁的相干激发的方法称为飞秒单脉冲CARS光谱测温方法。 该方法使用单个激光脉冲来实现温度测量, 而飞秒激光器的脉冲输出频率通常在千赫兹量级, 每秒可以获取上千个数据, 因此可以实现毫秒量级时间尺度内燃烧场温度的检测。 飞秒单脉冲CARS光谱技术具体分为啁啾探测脉冲飞秒CARS光谱技术和混合飞秒/皮秒CARS光谱测温技术。
2.2.1 啁啾探测脉冲飞秒CARS光谱(CPP fs CARS)技术研究进展
基于啁啾探测脉冲的飞秒CARS(CPPfsCARS)光谱测温技术是通过在探测光光路中插入色散玻璃棒, 对探测脉冲引入了啁啾, 使其在时间尺度进行拉伸, 将脉冲宽度由飞秒量级拉伸到皮秒量级, 同时, 引入啁啾使得探测脉冲的不同频率分量在时间上分离, 因此由飞秒脉冲泵浦产生的拉曼相干波包在消相过程的不同时刻与不同频率分量的探测光作用, 这一过程中所产生的频域光谱携带的拉曼相干波包的消相信息与温度有关, 基于此可以利用一个脉冲实现对温度的测量。 表1展示了CPP fs CARS测温技术近年的研究进展。

表1 CPP fs CARS测温技术研究进展
美国普渡大学Lucht课题组开展了大量的CPP fs CARS测温工作, Roy等[11]首先利用CPP fs CARS测温技术分别在高温加热气室和Hencken型燃烧器产生的稳定火焰中进行了测温实验, 实现了在300~2 400 K温度范围内测温实验, 测量的误差和重复精度分别约为1.5%~3%和约1%~6%。 随后Richardson等对CPP fs CARS测温的理论模型进行了详细报道, 并对提取温度信息的过程进行了详细描述。 Richardson等[16]利用偏振控制的方法进行了抑制CPP fs CARS中非共振背景信号的研究, 通过在泵浦光和斯托克斯光之间引入60°的偏振角, 实现了CARS信号与非共振背景的分离, 并进行测温实验, 准确度达到1.2%~3.5%。 Kulatilaka等[17]使用柱透镜作为相位匹配聚焦透镜实现了在一维空间上的单脉冲CASS测量。 Lucht等[18]在上述研究的基础上通过对泵浦光和斯托克斯光引入小的啁啾, 观察到CARS信号的干扰被最小化, 并且测温的精度得到了明显的改善。 Thomas和Lucht等[19]分别在甲烷-空气预混火焰和乙醇稀释喷雾火焰中进行了CPP fs CARS测温实验, 使用重复频率为5 kHz的飞秒激光, 满足捕捉除最湍流火焰外的温度分布。 测得两种火焰在径向位置相同高度的温度出现不同波动, 分析原因为它们的燃烧动力学由不同的基本机制驱动, 该结果表明CPP fs CARS技术在喷雾和湍流火焰中的应用潜力。
经过上述研究人员的完善, CPP fs CARS的装置如图4所示, 使用800 nm的激光同时做斯托克斯光和探测光, 经过OPA产生的675nm激光作为泵浦光。 这种波长分配方式优点在于可以提供高能量的探测脉冲, 提高信噪比, 而缺点在于有背景光的干扰。 在探测光光路中插入高色散玻璃棒对探测光脉冲引入啁啾, 使其脉冲宽度拉伸到皮秒量级。 三束光经过透镜聚焦于待测样品产生CARS信号, 三束光的偏振和能量通过半波片和薄膜偏振器控制。
图4 CPP fs CARS典型实验装置示意图[12]
Dennis等[20]使用CPP fs CARS技术在模拟燃气轮机燃烧器的两种运行情况下进行了重复频率为5 kHz的单脉冲温度测量, 一种表现出低水平的热声不稳定性, 另一种表现为高水平的不稳定性。 火焰温度测量的空间分辨率约为600 μm, 测温的精度约为±2%, 估计精确度约为±3%。 在火焰中12个不同位置进行温度测量。 通过测量不同位置的温度发现, 在燃烧器出口附近的循环区中, 测量的温度变化很大, 并且这种变化随轴向距离减小。 随着燃烧产物达到平衡, 温度随着离燃烧器出口的轴向距离而升高。 该报道结果表明CPP fs CARS可以在湍流燃烧和显著涡流燃烧的燃烧装置中进行高效的测温工作。
氮气分子通常被用作富氮空气燃烧中基于飞秒CARS燃烧诊断的探针分子, 然而, 随着含碳燃料的引入, 二氧化碳成为燃烧过程中占主导地位的分子, 逐步被用作燃烧诊断中的探针分子[21]。 美国普渡大学Lucht课题组[15]报道了以CO2为探针的CPP fs CARS测温工作, 建立了CO2/O2CPP fs CARS的唯象模型, 模型表明, 对啁啾探测脉冲使用长时间延迟, 可以在不受O2干扰的情况下进行CO2探针的温度测量, 并且不受非共振背景的影响。 他们将以CO2作为探针和以N2作为探针进行的CPP fs CARS测温结果进行了比较。 图5所示为在1274K温度时的绝热火焰获得的CO2和N2的CPP fs CARS的实验光谱和理论光谱的单次拟合之间的比较。 燃烧产物中的CO2和N2浓度分别为30%和53%, 使用的探测脉冲时间延迟分别为7.2和1.0 ps。 对比结果显示对于约1 300 K的火焰温度, N2CPP fs CARS谱具有更好的信噪比, 这是由于N2在燃烧产物中的浓度较高, 并且非共振背景有助于对N2CARS信号的增强。
由于具有长探测脉冲延迟的CO2CPP fs CARS光谱不受非共振背景的影响, 且CO2具有较低的振动跃迁频率, 因此在1 000 K以下, CO2比N2表现出更好的测温灵敏度, 该报道表明CO2也可以作为温度测量探针。 虽然CPP fs CARS已有较好的应用效果, 但其仍然具有局限性, 由于对探测脉冲只是在时间尺度上进行展宽, 保留了其频域宽度, 因此CPP fs CARS的光谱数据是宽带啁啾信号与拉曼相干波包作用的复杂结果, 光谱的形态无法与被测介质的某组拉曼跃迁有直接的对应关系, 并且CPP fs CARS的光谱形态对输入激光的特性非常敏感, 在光谱信号中提取温度信息需要进行非常复杂的计算和数据拟合过程。 基于这些局限性, 研究人员进一步发展了混合飞秒/皮秒CARS测温技术。
2.2.2 混合飞秒/皮秒CARS光谱测温技术研究进展
混合飞秒/皮秒CARS使用具有窄线宽的皮秒探测脉冲, 该探测脉冲并不是通过拉伸飞秒脉冲获得的, 而是通过脉冲整形获得的, 其在频域具有较窄的带宽, 因此混合飞秒/皮秒CARS光谱通常具有较高的光谱分辨率, 可以进行CPP fs CARS光谱技术难以开展的纯转动CARS测温, 而且混合飞秒/皮秒CARS光谱中每个光谱峰值均对应具体的拉曼跃迁, 因此可以更加直观地实现温度测量。 在进行光谱拟合时, 需要拟合的参数相比于啁啾探测脉冲CARS要少很多, 因此其模型建立比CPP fs CARS要简单, 并且所需的计算成本也较低。 表2总结了飞秒/皮秒混合CARS测温技术近年的研究进展。

表2 混合飞秒/皮秒CARS测温技术研究进展
根据CARS过程激发的能级为振动能级或转动能级, 可以将CARS光谱分为振动CARS光谱和转动CARS光谱。 振动CARS光谱技术激发探针分子的振动能级, 分子的振动跃迁主要发生在较高的温度。 较高温度情况下, 有较大百分比的基态粒子被激发到第一和第二振动能级, 因此振动CARS光谱测温在1 000 K以上的温度范围内体现出良好的测温精确度。 纯转动CARS光谱技术激发分子的不同振动能级中的转动能级, 并且一般是利用基态的纯转动跃迁进行温度测量, 其在较低的温度下显示出较高的测温灵敏度[27]。 2017年Richardson等[28]对CPP fs CARS和混合飞秒/皮秒CARS技术进行了比较分析, 当被测目标温度低于1 200 K时, 纯转动混合飞秒/皮秒CARS具有较高的测温精度; 当被测目标高于1 200 K时, 振动CARS和转动CARS具有相似的测温精度; 当被测目标具有较大的温度跨度范围时, 可同时进行振动和转动CARS测量的混合飞秒/皮秒CARS更适合这种测量场景。 在混合飞秒/皮秒CARS技术中, 较高能量的窄带皮秒探测脉冲是保证获得高信噪比和准确测量结果的关键, 通过脉冲整形获得高能量的窄带皮秒探测脉冲是重要的研究内容, 在此首先简要介绍一下脉冲整形装置的研究进展。 表3列出了近年脉冲整形的研究进展。
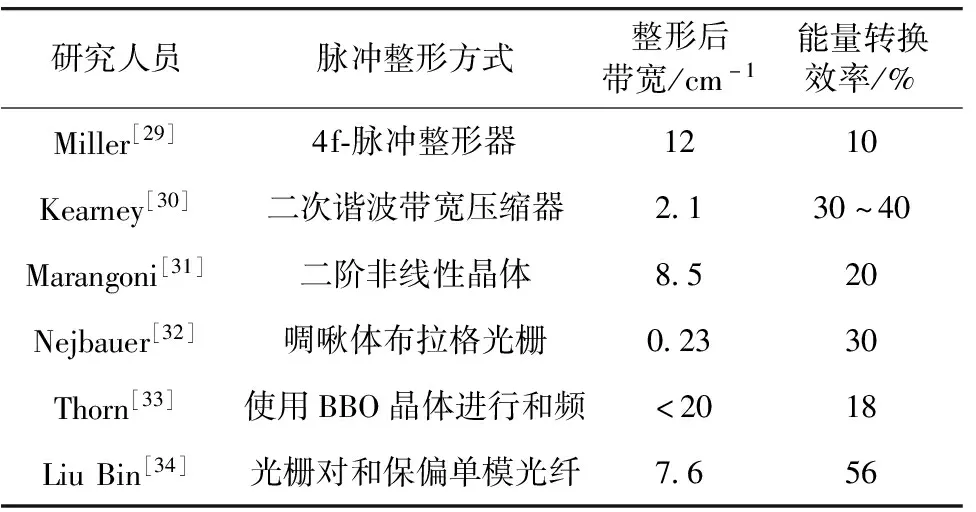
表3 脉冲整形方法
2010年美国爱荷华州立大学机械工程系的Miller等[29]报道了利用振动混合飞秒/皮秒CARS技术在非稳态高温火焰中的高速测温工作。 具有Δω≈12 cm-1的窄带探测脉冲ω3是使用基于光栅的折叠4f脉冲整形系统从高能790 nm激光脉冲的小光谱部分中选出的, 选择适当的探测脉冲延迟来最小化非共振背景。 通过调整探测光时间延迟, 将非共振背景抑制2个数量级, 测量了预混氢气-空气火焰的温度, 最高温度达2 400 K, 测量精度为2.2%, 准确度为3.3%。
在以上的测温基础上, Miller等[22]又开展了基于振动混合飞秒/皮秒CARS的大范围温度测量, 在298~2 400 K温度范围进行测量, 得到的测量结果与模拟光谱具有良好的一致性。 通过光谱解析初始激发后32 ps发生的依赖于转动量子数J的无振动相干恢复, 克服了振动混合飞秒/皮秒CARS在1 200 K以下测温的有限灵敏度。 之前报道的使用N2进行的混合飞秒/皮秒CARS在延迟时间小于8 ps的时间区域进行测温, 这个延迟时间范围内对振动能级分布的灵敏度较高, 但对转动能级分布的灵敏度较低, 选择32.5 ps的探针延迟来优化在较大温度范围内的测温灵敏度, 并且可以通过改变探针延时来调整大范围测温的灵敏度。 通过减少探针延迟, 可以将灵敏度转移到较高温度; 而增加探针延迟可以将灵敏度转移到较低温度。
清华大学精仪系的李岩教授课题组[35]报道了优化探针时间延迟对测温灵敏度影响的研究。 研究了在利用振动飞秒/皮秒混合CARS技术进行测温时, 探测光的延迟时间对测温灵敏度的影响。 通过使用10~35 ps的优化探针时间延迟, 获得了在300~2 500 K的最大测量温度灵敏度, 测量温度与最佳时间延迟之间的关系通过图6(a)中的幂函数拟合出来。 其中箭头所指为拟合曲线, 拟合结果与计算结果的最大偏差小于3%。 除此之外, 该课题组还研究了存在背景噪声的情况下, 受到有限信噪比的影响时, 使用4f脉冲整形器得到的不同带宽的探测脉冲分别对应的最佳延时和测量目标温度之间的关系, 结果显示出在某些温度拟合结果出现跳跃, 但拟合和计算的结果一致性总体良好, 如图6(b)所示。 最佳时间延时随温度的升高而减小, 并且在高温下变化变慢, 这表明具有在一个温度范围内使用公共时间延时并同时实现灵敏测量的可能性[35]。

图6 (a)不同温度下的最佳时间延迟拟合曲线;(b)考虑有限信噪比的影响后, 不同探测带宽的最佳延时
李岩教授课题组还分别以N2/O2/CO2为温度探针, 使用振动飞秒/皮秒混合CARS技术对贫油火焰进行了测温研究, 测量的稳态火焰温度在1 700~2 000 K, 准确度在3%左右[36]。 2022年, 该课题组[37]又提出了一种在CARS测温中有效的多参数优化方法—改进的自适应差分(IOSaDE)算法, 用于振动混合飞秒/皮秒CARS测温中的多参数优化。 在不同的模拟光谱中使用该算法进行20次连续试验的拟合温度与目标温度一致。 并且在不同探针延时的实验光谱中的比较表明, IOSaDE方法可以将20次连续试验的拟合温度的标准偏差降低近4倍, 并将拟合温度的误差降低18%以上。
巴黎萨克雷大学Barros等[38]报道了使用振动混合飞秒/皮秒CARS技术在层流甲烷/空气火焰和环境空气中进行温度测量, 在典型火焰温度下的测量精度低于0.5%, 相比之前精度提高了两倍, 这归因于所用的脉冲整形单元, 包括体布拉格光栅和法布里-珀罗标准具, 以及一个定制的晶体光纤线性放大器和一个二次谐波产生模块。 通过此脉冲整形单元, 获得脉冲持续时间为58 ps, 光谱宽度为0.4 cm-1, 单脉冲能量为100 μJ的探测脉冲。 图7(a)为在甲烷/空气火焰中, 使用重复频率为5 kHz激光获得的N2CARS光谱图, 可以看到三个振动带, 并且许多旋转线也被清晰地分辨出来。 图7(b)为在燃烧器上方5 mm处1 s内采集的5 000个温度数据(蓝色原点)的分布, 黄色曲线为计算得到的温度平均曲线, 可以看出温度曲线存在一些波动变化, 这是火焰本身的不稳定引起的, 这一结果体现了飞秒CARS测温技术可以进行瞬时温度测量的能力。

图7 在5 mm高度的甲烷/空气火焰中进行温度测量
如上文所述, 转动CARS的温度灵敏度来自旋转能量状态的分布, 并且主要是在基态振动状态下, 即使在较低的温度下也是活跃的。 Miller等[39]最先报道了纯转动混合飞秒/皮秒CARS测温工作, 所报道的纯转动混合飞秒/皮秒CARS测温光路系统与振动飞秒/皮秒混合CARS实验系统不同之处在于三束脉冲的中心波长均为800 nm。 他们在零时间延时和13.5 ps的探测脉冲延时条件下测量N2频域CARS光谱信息。 通过使用13.5 ps的探测脉冲延迟, 确保由碰撞或非共振背景引起的温度偏差可以忽略不计。 因此所得到的光谱具有足够的信噪比, 单次激发纯转动CARS光谱在306 K时信噪比为3 900∶1, 在500 K时信噪比为425∶1, 700 K时为42∶1。 在保持所有激光参数恒定的情况下, 对温度为800 K时的单次激发光谱进行了测量, 显示出的信噪比约为15∶1, 这一信噪比为当前的激光参数配置的单次激发测量上限。 通过增加4f脉冲整形器的吞吐量或者使用更高能量的探测脉冲来提高测量的信噪比, 进一步将这种测温方法应用于更高的温度是未来研究的主要内容。
美国桑迪亚国家实验室的Kearney等[40]使用纯转动混合飞秒/皮秒CARS技术在290~800 K的炉加热空气中进行了温度和浓度测量。 他们在实验中分别使用单个法里-珀罗标准具和双法布里-珀罗标准具获得了1.5和7.0 ps持续时间的探测脉冲。 当使用两个自由光谱范围分别为455和13 cm-1的标准具时, 获得的探测脉冲频谱宽度为2.1 cm-1, 这时的探测脉冲能量也相对较低, 为4 μJ; 使用单标准具时获得的是一个频谱宽度为5.3 cm-1的探测脉冲, 单脉冲能量为12 μJ。 由于使用双标准具获得的探测脉冲的单脉冲能量较低, 导致单次激发的信噪比降低, 测温的精度也有所下降。 而使用单标准具时, 信噪比较高, 在299~700 K温度范围单次测温精度为1%, 接近800 K时测温精度为1.9%; 该报道结果表明使用较大光谱分辨率的探测脉冲也可以获得足够的测温精度, 但总体而言这种标准具滤波的方式获得的探测脉冲能量较低, 限制了可测量的温度范围。 基于这一点不足, 该课题组又使用了前文所述的二次谐波线宽压缩装置获得了转换效率更高的皮秒探测脉冲, 基于二次谐波带宽压缩器的混合飞秒/皮秒CARS具有更大的温度测量范围[30], 利用这一特性该课题组还在高温高压、 富燃、 甚至固体颗粒燃烧等高消光比环境下进行了温度测量。 普渡大学的Athmanathan等[41]首次利用纯转动混合飞秒/皮秒CARS对旋转轰爆燃烧室的尾焰温度进行了测量, 测量的准确度小于2%。 图8是用于测量旋转轰爆燃烧排气尾焰的双光束CARS光路系统示意图, 使用了一个窄带脉冲放大器(NSA)对探测脉冲进行放大, 放大后得到光谱带宽为1.9 cm-1, 脉冲宽度为10 ps的激光脉冲, 经过倍频后获得一个532.2 nm的探针光束, 单脉冲能量达到800 μJ, 高能的探测脉冲有利于提高温度测量的信噪比, 进一步表明了纯转动飞秒/皮秒混合CARS在高温、 湍流、 非稳态的复杂燃烧环境中具有十分重要的应用价值。
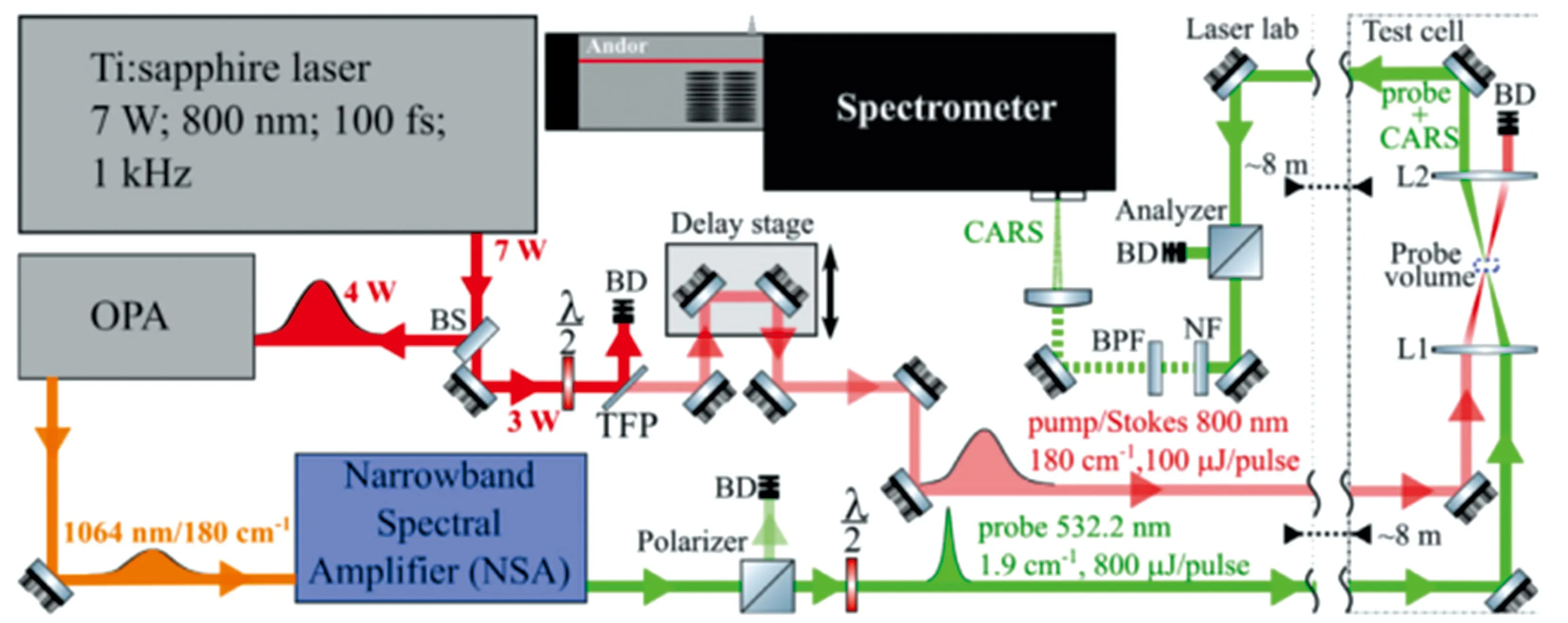
图8 纯转动CARS光学系统示意图[41]
3 总结与展望
综述了飞秒CARS光谱测温技术的研究进展, 分别介绍了飞秒时间分辨CARS光谱测温技术、 啁啾飞秒探测脉冲CARS光谱测温技术和混合飞秒/皮秒CARS 光谱测温技术。 其中飞秒时间分辨CARS测温技术需要对探测脉冲进行多次时间延迟, 通常需要一定的时间积累才能记录一次光谱数据, 不能实现火焰的瞬时温度信息测量; 而其他两种测温方法凭借飞秒激光千赫兹量级的重复频率, 能够实现毫秒量级(每秒可获得上千个测温数据)时间尺度内燃烧场动态分析与监测, 可以对瞬态燃烧场进行测量。 目前, 测量的温度范围已经在300~2 500 K, 并且测温结果的准确度小于3%。
目前, 国外多个课题组已经开始了对飞秒CARS光谱测温技术的研究, 应用场景已经从平面火焰炉产生的稳态火焰拓展至非稳态湍流燃烧场、 模拟大型燃气轮机火焰和模拟航天发射台等。 国内很多课题组也已经进行了飞秒CARS测温技术的研究, 并且取得了一定的成效。 飞秒CARS光谱测温技术仍然面临许多挑战, 包括研制更加稳定、 集成化的光源系统, 使用更加快速拟合出温度信息的算法, 获得更高的测量信噪比等。 加快开展和优化飞秒CARS光谱测温技术的研究将为我国大型燃气轮机和航空航天发动机的研发过程提供有力的技术支撑, 同时在其他低温低压湍流燃烧研究中也具有重用的应用前景。