电磁直线悬架主动控制研究*
2024-04-05雷嘉豪程吉鹏
陈 晨 雷嘉豪 程吉鹏 刘 波
(陕西工业职业技术学院汽车工程学院 陕西 咸阳 712000)
引言
悬架作为连接车身与车桥之间的部件,其性能对车辆的平顺性及安全性有着显著的影响[1]。电磁直线悬架能够通过车身姿态采集信号,由控制器控制直线电机输出主动推力来衰减路面所引起的车身振动,有效提高了汽车舒适性与操纵稳定性[2-3]。目前,电磁直线悬架的研究热点集中在主动控制策略。现有的常规主动控制中,外环主要有天棚控制、模糊控制[4-5]、最优控制等;内环以电流滞环等矢量控制为主[6]。
电磁直线悬架在工作时,振动频率较高,振动随机性较强,要求直线电机控制系统具有速度及推力响应快等特点。区别于矢量控制,直接推力控制克服了复杂的矢量解耦、参数依赖性较高等不足,直接对磁链、电磁推力进行调节,使得控制更准确,系统响应更迅速,更加适应电磁直线悬架工作环境。但传统直接推力控制由于电压矢量切换的不连续性以及滞环控制造成磁链和电磁推力波动较大,严重影响控制效果。
针对上述问题,本文提出了一种由主环与内环构成的电磁直线悬架主动控制策略。其中,主环采用通过粒子群算法优化的LQG 控制得出理想主动控制力,内环采用基于空间矢量脉宽调制(SVPWM)技术的直接推力控制(DFC)跟踪理想主动控制力。为了降低传统DFC 中的磁链、电磁推力波动,以磁链、电磁推力双闭环控制器替换了滞环比较器,以SVPWM 模块代替开关选择模块。在此基础上,针对PI 控制器鲁棒性差、精度低的缺点,设计了速度环滑模控制器以提高电机系统控制特性。通过Matlab 搭建系统模型,进行电机控制效果及悬架动态特性仿真分析。
1 电磁直线悬架的结构与动力学模型
1.1 电磁直线悬架的结构与原理
图1 为电磁直线悬架结构。电磁直线悬架主要由直线电机(做为作动器)、螺旋弹簧、控制器等组成。当汽车行驶在不平坦的路面上,由传感器采集车辆姿态信息并传输至控制器,控制器控制直线电机输出推力,实现主动控制,以改善悬架性能。

图1 电磁直线悬架结构
1.2 车辆电磁直线悬架二自由度动力学模型
车辆电磁直线悬架二自由度动力学模型如图2所示。

图2 车辆电磁直线悬架二自由度动力学模型
利用牛顿运动定律,得到如下方程组:
式中:ms为簧上质量;mu为簧下质量;xs为簧载质量位移;xu为非簧载质量位移;z 为路面垂直位移;ks为悬架刚度系数;kt为轮胎刚度系数;cs为减振器阻尼;Fa为主动控制力。
1.3 直线电机数学模型
在d-q 坐标系中,直线电机的电压平衡方程为:
式中:Rs为绕组电阻;Ld为d 轴电感;Lq为q 轴电感;id为d 轴电流;iq为q 轴电流;ud为d 轴电压;uq为q轴电压;φf为永磁磁链;ω 为电角速度。
电磁推力(主动控制力)方程和电机的运动方程分别为:
式中:τ 为极距;v 为次级速度;M 为运动质量;f1为负载;pn为极对数;B 为摩擦系数。
1.4 试验验证
为了验证所建直线电机数学模型的正确性,进行直线电机电磁推力特性试验,如图3 所示。

图3 直线电机电磁推力特性试验
在试验过程中,输入电压从10 V 增大到50 V,对同一电压进行2 次试验,得到2 组电磁推力值,取平均值。试验结果与仿真结果对比如图4 所示。

图4 直线电机电磁推力试验结果与仿真结果对比
从图4 可以看出,直线电机电磁推力试验结果与仿真结果基本一致,验证了所建直线电机数学模型的正确性。
2 电磁直线悬架主动控制策略
电磁直线悬架主动控制框图如图5 所示。

图5 电磁直线悬架主动控制框图
主环通过粒子群优化的LQG 控制得出悬架理想主动控制力;内环采用基于SVPWM 的直接推力控制,结合速度环滑模控制器,控制直线电机输出电磁推力,跟踪理想主动控制力,实现悬架主动控制。
2.1 主环
主环采用线性二次型LQG(Linear-Quadratic-Gaussian Control)最优控制算法,可将控制目标的大小减到最小。
本文的目标是提高车辆动力学性能,因此,控制参数主要为:车身加速度加权系数q1、悬架动挠度加权系数q2、轮胎动变形加权系数q3。
通过粒子群算法优化的LQG 控制,得到控制参数的最优值为q1=5.349×103,q2=6.153×106,q3=3.627×106。
2.2 内环
传统的直接推力控制(DFC)虽然可以获得快速的动态响应,但定子电流不稳定,造成磁链和电磁推力脉动较大,无法达到预期的控制效果。为了克服传统DFC 的缺陷,引入空间矢量脉宽调制(SVPWM)技术,使其和DFC 相结合。
2.2.1 基于SVPWM 的直接推力控制
设计基于SVPWM 的直接推力控制框图如图6所示。

图6 基于SVPWM 的直接推力控制框图
区别于传统的直接推力控制(传统DFC),基于SVPWM 的直接推力控制(简称改进的DFC)由PI 控制器取代磁链、电磁推力滞环比较器,通过检测输出电压uabc和电流iabc,进入磁链和电磁推力计算及扇区观测模块,得到初级磁链、电磁推力的实际值Φ、F,通过速度PI 调节器得到推力给定值F*,将电磁推力、磁链的实际值与给定值进行比较,综合电磁推力误差与磁链误差产生参考电压矢量,进入SVPWM 模块选择所应施加的电压矢量,从而控制直线电机工作。
空间矢量脉冲调制(SVPWM)是基于空间矢量的概念,通过逆变器开关状态的选择产生PWM 波,以实现电机的变频调压控制[7]。SVPWM 把每一个扇区分成若干个对应于开关周期的小区间,每个小区间由6 个有效空间矢量和2 个零矢量的不同线性组合构成等效参考矢量uref,使电机磁通轨迹逼近圆形。要实现SVPWM,需要进行扇区判断、工作电压矢量作用时间及矢量切换点确定。
2.2.2 速度环滑模控制
在上述控制系统中,速度环调节器根据悬架速度和实际速度输出推力给定值,对整个电机控制性能影响很大。速度环调节器常规采用PI 控制,但悬架工作时,速度变化随机性强、频率快,使得常规PI对系统的精准性和快速性控制稍显不足。为了进一步提高控制性能,本文设计了速度环滑模控制器,取代PI 控制器。
滑模控制是含有切换性质的非线性控制,使系统在预先设定好的轨迹中有规律地自由切换,滑动阶段对外界干扰迟缓,拥有较好的鲁棒性[8]。
对公式(2)、公式(4)进行变换得到:
电机系统的状态变量为:
式中:v*为电机给定速度,rad/s;v 为电机实际速度,rad/s。
对公式(6)求导后得到:
设计滑模面函数为:
式中:c 为滑模控制参数。
对公式(8)求导可得:
采用指数趋近律:
式中:k、ε 为待设计参数。
分析可知ss˙<0,满足李雅普诺夫稳定性定理。因此,s 会最终稳定于滑模面。
联立公式(9)、公式(10)可得q 轴电流为:
将公式(11)代入公式(3),可得到理想主动控制力(电磁推力)。
3 仿真分析
在正弦及B 级随机路面、车辆速度为30 km/h的条件下,通过Matlab 对直线电机控制性能及悬架动态性能进行仿真分析。仿真参数见表1。

表1 仿真参数
3.1 电机控制性能仿真
为验证所设计内环控制策略的效果,对电机磁链轨迹、输出电磁推力及电机速度进行仿真分析,以判断改进的DFC 对理想主动控制力和悬架实时运动速度的跟踪效果,然后将改进的DFC 与传统DFC进行对比分析。磁链轨迹对比如图7 所示,电磁推力、悬架运动速度跟踪效果对比如图8 所示。
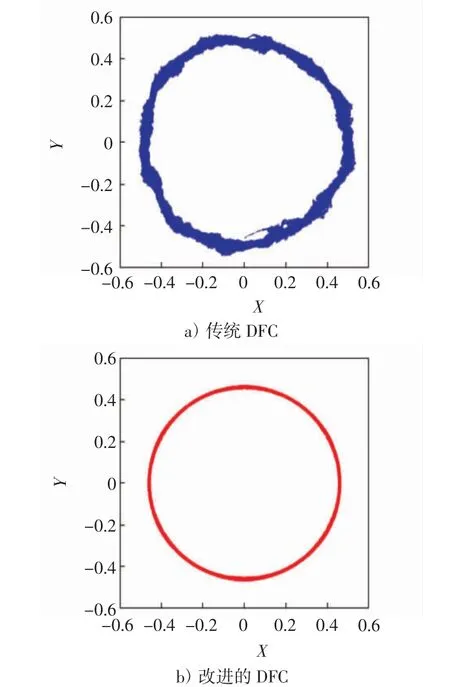
图7 磁链轨迹对比
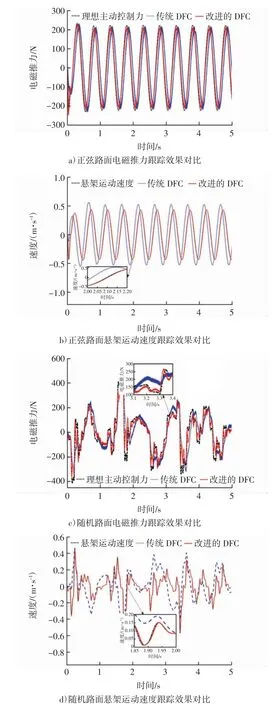
图8 不同路面激励下电磁推力、悬架运动速度跟踪效果
由图7 可知,与传统DFC 相比,改进的DFC,直线电机磁链波动较小,轨迹更加逼近圆形。由图8 可知,与传统DFC 相比,改进的DFC,在不同路面激励下,输出电磁推力对于理想主动控制力跟踪效果更好,且电磁推力波动明显减小;同时,电机速度相较于给定悬架运动速度几乎没有波动。说明所设计的速度环滑模控制器具有较强的抗扰动能力,提高了系统的响应能力。
3.2 悬架动态特性仿真
在随机路面条件下,对电磁直线悬架主动控制的动态特性进行仿真分析,分别得到如图9 及如图10 所示的悬架动态特性时域及频域响应曲线。
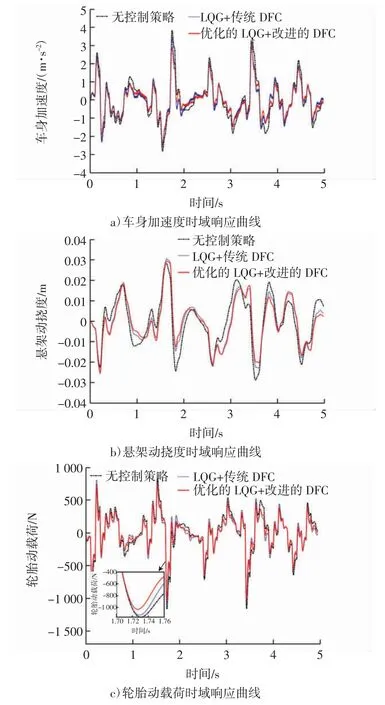
图9 电磁直线悬架动态特性时域响应曲线
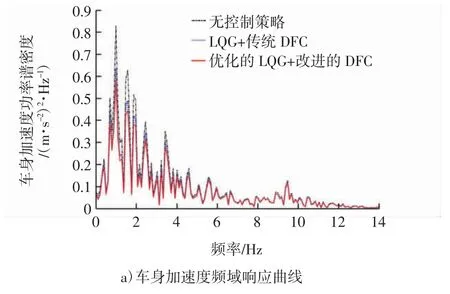
图10 电磁直线悬架动态特性频域响应曲线
电磁直线悬架主动控制动态特性均方根值见表2。

表2 电磁直线悬架主动控制动态特性均方根值
综合图9、图10、表2 分析得出,相较于无控制策略,在原有主动控制策略下,悬架车身加速度、悬架动挠度、轮胎动载荷均方根值分别提高14%、6.3%、12.1%;在本文所设计的主动控制策略下,悬架车身加速度、悬架动挠度、轮胎动载荷均方根值分别提高21.8%、9.8%、17.6%。2 种控制策略中,本文所设计的主动控制策略,低频段悬架幅频特性曲线的幅值降低程度最大,但高频段无明显降低。
综上所述,本文所设计的电磁直线悬架主动控制策略能有效改善悬架动态特性,提高车辆性能。
4 结论
针对电磁直线悬架系统,建立了悬架系统动力学模型及直线电机数学模型,提出了一种由主环和内环构成的主动控制策略。其中,主环采用通过粒子群算法优化的LQG 控制计算出理想主动控制力,内环采用基于SVPWM 技术的直接推力控制策略跟踪理想主动控制力。在此基础上,设计了速度环滑模控制器以提高控制性能。通过Matlab 进行的仿真分析结果表明:采用本文所设计的主动控制策略,直线电机磁链轨迹更加逼近圆形,输出电磁推力及电机速度响应跟踪效果更好,有效抑制了电磁推力和电机速度波动;同时,电磁直线悬架系统动态特性得到明显改善。仿真分析结果验证了本文所设计的主动控制策略的可行性与有效性。
