一种新型升压DC-DC变换器
2024-04-01段玥彤
段玥彤
(江苏省张家港中等专业学校)
0 引言
开关电源在日常居民的生产生活中被广泛应用,开关电源的核心在于其控制策略,其控制方法吸引了众多国内外学者的关注和研究。在当今集成电路技术快速蓬勃发展的背景下,由于开关电源的主要特征是效率高、体积小、数字化,使得国内外大量学者均集中研究开关电源数字化,该领域成为了开关电源的研究热点之一[1-2]。
DC-DC boost变换器是开关电源中的一种,其能够将输入侧低压直流电变换为输出侧高压直流,可以将其理解为直流升压变压器,其主要应用在将直流低压转换为直流高压的场合[3]。目前该变换器主要的控制方法是无电流传感器控制法,该方法具有电路能耗比低、稳态性好等特点。但该方法抗干扰能力差、易受外界环境干扰、电流测量成本高,一旦出现外界干扰或内部扰动,将会导致输出电压不稳定[4-5]。
论文在理论分析的基础上建立了状态观测模型,能够实时计算出DC-DC型boost电路中电容和电感的输出信号,进而可以对电路输出数值进行数字化控制。为了验证该方案的可行性,论文基于Matlab软件建立模型,并设定干扰信号,来验证电路输出的稳定性。仿真结果表明,当电路出现干扰或负载出现波动时,论文建立的DC-DC boost变换器电路拓扑结构均能够快速稳定,提高了开关电源的稳定性和可靠性。
1 变换器电路拓扑数学建模
1.1 控制策略
在实际应用中,开关电源电路拓扑结构会随需求变化而进行变动,开关电源传统的控制策略主要是PID控制,将采集系统的输出电压与设定的输出值进行比较,然后通过微分积分比例运算后,调节输入信号,进而控制输出数值,该控制策略稳定性较好,但也存在一定局限性[6]。一旦负载发生快速增大或快速减小,或者是大幅度调节输入信号,其输出瞬态响应性能较差,无法满足实际工程要求。基于此论文提出的滑模控制方法采用非线性控制,具有瞬态响应快、跟随性强的特点,能够满足DC-DC boost输出控制响应快的要求。滑模控制原理是将控制系统由外部运动变换至平面内之后,运动到给定或设定的点,相当于设置一个新的平面,该平面决定了整个控制系统的特性,使外部环境或系统内因素无法对其造成干扰,进而实现快速稳定[7]。
1.2 建立模型
DC-DC boost电路结构如图1所示,从图1中可以看到,该电路主要包括晶体管、模拟负载的电阻、滤波的电感及稳压的电容。晶体管是三端口,由一个端口的输入信号控制另外两个端口的导通和关断。当控制信号使得P1晶体管导通,而使P2晶体管关断时,通过观察电路可得,输入电压的回路经过电感L、负载电阻R、电容C然后返回负极,在这个过程中输入电压Ui给电容充电同时给负载R供电。而当控制信号使得P1晶体管关断、P2晶体管导通时,此时的导通回路则是电感L、电容C、负载电阻R、P2晶体管,已经储能的电容C将通过负载电阻进行放电,同时也会通过晶体管P2对电感进行放电,此时电感主要起到的作用是稳压,防止负载电阻R上的电压发生突变,从而降低电压波形畸变,提高电压的质量。合理控制驱动信号加上合适的电容和电感选择值,会促使输出电压U0更加稳定,由基尔霍夫电流(KCL)和基尔霍夫电压(KVL)定律可得到该拓扑电路的数学模型。
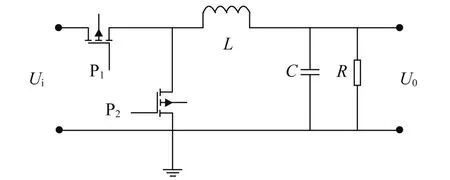
图1 DC-DC boost变换器电路结构图
当P1晶体管导通而P2晶体管关断时,模型如公式(1)、(2)所示。
当P1晶体管关断而P2晶体管导通时,模型如公式(3)、(4)所示。
2 DC-DC boost变换器在滑模控制技术下的仿真验证
为了进一步分析DC-DC boost变换器数学模型能否满足工程对动态快速响应的要求,论文基于Matlab仿真软件进行验证。仿真的框架流程如图2所示,主要包括boost变换器部分、状态观测、驱动信号控制装置、输入和输出信号。整个仿真分析流程可以进一步概括为,状态观测装置会观测DC-DC boost输出端的电容电压UC和电感电流IL,然后结合输入电压Ui经过滑模控制运算后输出得到控制信号,该控制信号可以控制输出PWM波形,PWM波形进而控制两个晶体管的开通和关断,从而最终控制输出电压,通过不断地调整各参数使得输出电压数值满足预期要求。
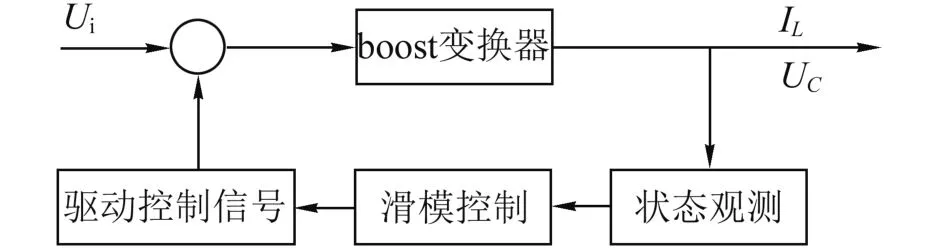
图2 软件仿真信号控制流程图
2.1 状态观测值与真实值对比分析
利用Matlab软件对比分析拓扑电路中的状态观测值和真实值,拓扑电路的电感、电容、负载、输入和输出电压参数见下表。按照表中的变换器参数进行仿真分析。
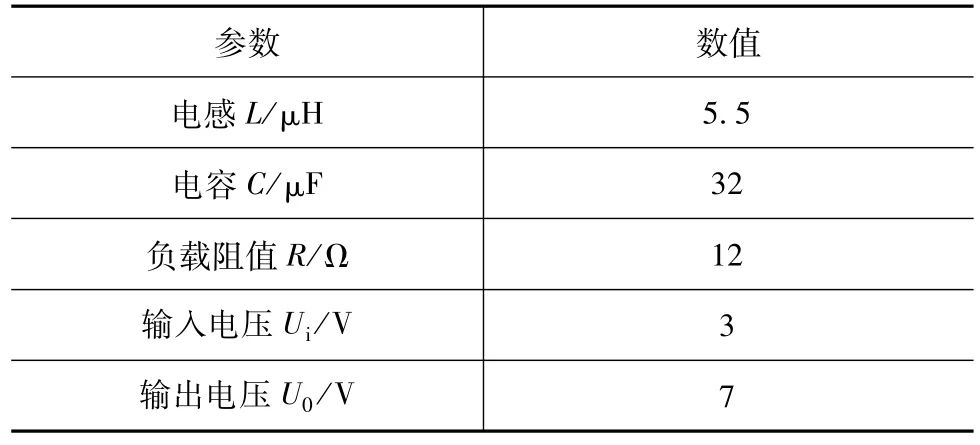
表 变换器各参数
仿真的结果如图3和图4所示。从图3可以得到,变换电路中电感电流观测值与真实值在0.15ms之前有一定的波动,但是在0.15ms以后这种波动及误差几乎可以忽略不计,仿真结果表明,拓扑电路中电感电流观测值能够很好匹配真实值。
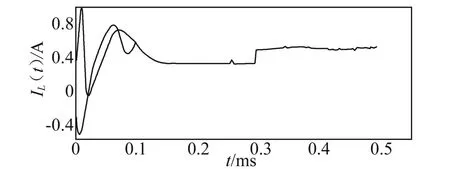
图3 变换电路中电感电流观测值与真实值对比
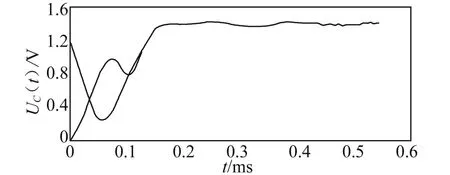
图4 变换电路中电容电压观测值与真实值对比
从图4可以得到,拓扑变换电路中电容电压观测值与真实值在0.2ms之前,二者曲线相差较大,但是在0.2ms以后二者曲线相互重叠,这表明电容电压观测值与真实值匹配性非常好,即拓扑电路中观测值能够替代真实值。综上,通过拓扑电路中的电感电流和电容电压的真实值和观测值对比分析可以得到,二者偏差非常小,能够满足预期设计要求。
2.2 负载电压仿真分析
传统的DC-DC boost拓扑电路主要采用PID控制策略,该控制策略对于负载突变的快速响应能力较差。对此,论文采用非线性滑模控制技术以加快电路的响应速度。为了对比研究分析传统PID控制与滑模控制效果,基于Matlab软件,论文设定一个扰动然后观察输出电压的波形,仿真的结果如图5所示。在正常运行拓扑电路中0.4ms时人为设定一个扰动,从图中可以看到两个波形均出现扰动,证明了设定扰动的有效性。图5中上方变化波形为PID控制输出波形,下方波形为滑模控制输出电压波形,从图中看到,PID控制波形波动最大幅值约0.025V,采用滑模控制的波形最大波动幅值约为0.008V,表明滑模控制技术输出波形波动幅度更小,输出更加稳定。从稳定时间来看,滑模技术控制的电压输出波形仅有一个波动,时间约为0.01ms,而传统PID输出电压波形稳定的时间约为0.2ms,且在该段时间内出现上下波动情况,而滑模控制技术仅有一段向下波动。通过对仿真结果的分析我们可以得到滑模控制技术要优于传统的PID控制技术,更适用于快速响应要求高的开关电源。
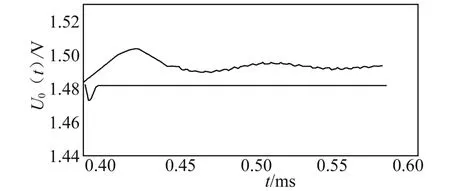
图5 滑模控制技术与PID控制技术扰动后输出电压变化趋势
3 结束语
开关电源回路中的核心是控制,传统的开关电源控制策略是采用PID控制,但该控制方法动态响应速度差,一旦负载突变或输入电压快速调节,输出电压无法有效跟随。基于这个背景,论文提出建立新型拓扑电路,利用状态观测估计电路结构中的电感和电容数值,通过估算出的数值控制驱动装置来调节输出电压,以达到设定的输出期望值。同时基于仿真软件进行验证分析,仿真结果表明状态观测值能够很好地替代真实值。同时在拓扑电路中设定一个扰动,来进一步仿真分析传统PID调控和采用滑模控制的输出数据动态收敛性,仿真结果表明,采用滑模控制策略能够实现快速收敛,表明新型控制策略具有较好的动态响应特性,具备较强的抗干扰能力,能够满足工业系统对于控制的要求。
