基于柔性铰链结构的大口径压电快摆镜
2024-03-31时运来孙海超
王 强, 时运来,孙海超,李 兴,刘 伟
(南京航空航天大学 航空航天结构力学及控制全国重点实验室,江苏 南京 210016)
0 引言
望远镜是人类文化最伟大的奇迹之一,它既对天文学领域的发展做出了巨大的贡献,也深刻影响着其他科学的发展甚至整个人类社会的进步,改变了人类对宇宙的认识。17世纪,伽利略发明第一台天文望远镜是人类探索外空的起点,经过几百年的时间,人类对外太空有了越来越深刻的了解。深空探测是人类探索宇宙奥秘的必经之路,是在近地观测取得重大进展的基础上,向太空等未知领域探索的必然拓展[1]。
在光电追踪系统中[2],使用普通的跟踪系统精度都较低,无法达到使用要求,因此,国内外常采用复合轴样式的控制系统[3]。通过复合轴控制系统,既可以提高追踪系统的搜寻范围,又可以提高追踪精度[4]。复合轴控制系统由两部分组成,分别是主跟踪轴和子跟踪轴[5]。主跟踪轴由主架组成,它实现了大范围的搜寻,因此也被称为粗跟踪轴;子跟踪轴由快摆镜组成,通过快摆镜系统进行高精度的调节,因此称为精跟踪轴[6]。
美国几家单位联合建造了大麦哲伦地基望远镜[7],成效清晰度远超哈勃望远镜。它通过多个快摆镜机构组合的方式来提高成像精度,每个小快摆镜均高达0.039"[8]。国内中科院设计了一块使用压电作动器驱动的三点式快摆镜,用于激光检测领域[9]。此快摆镜在精度小于4 μrad的情况下,同时有着双轴5 mrad的摆动范围,随着通光孔径不断增大,对偏转范围的要求也越来越高,故而迫切需要研究出既能满足大通光孔径,又能实现大偏转范围的快摆镜[10]。
压电驱动器作为驱动元件,其具有分辨率高、输出作用力大和响应速度快的特点,由于压电驱动器的伸长量较小,限制了大口径快摆镜的偏转角度的大小,所以需设计一款柔性铰链放大机构来放大压电驱动器的输出位移[11]。
本文设计了一款单轴绕轴心摆动的大口径快摆镜,通过杠杆式的结构对压电驱动器的位移进行了三级放大,并以柔性轴承作为快摆镜的运动关节来提高精度[12]。
1 快摆镜整体设计
1.1 设计要求及工作原理
图1为快摆镜原理示意图。快摆镜指标有以下要求:
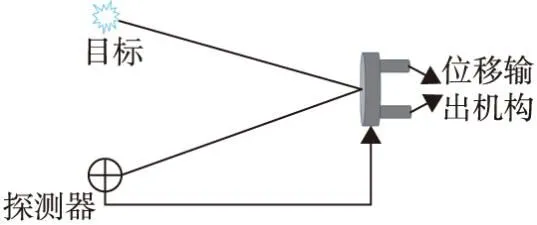
图1 快摆镜原理示意图
1) 通光口径:长轴>250 mm,短轴>180 mm,绕长轴转动;
2) 转动范围:>±2 mrad;
3) 控制精度:6 μrad;
4) 工作频率:0~120 Hz。
通光口径决定快摆镜镜面大小,转动范围决定放大机构放大后位移大小,控制精度决定压电驱动器应选用的输出分辨率。
柔性机构具有无摩擦、无磨损等特点,因此,选用柔性机构来支撑镜面可以解决运动部件之间高频、小位移的相对运动,克服了传统运动部件的缺点,使快摆镜具有精度及谐振频率更高的优点。本文设计的快摆镜将柔性铰链放大机构通过螺钉固定在底座上,在压电叠堆和预紧螺钉之间放置金属垫片防止损坏叠堆。当在压电叠堆两端施加电压使其伸长时,位移传递至放大机构放大后,通过柔性轴承把位移传递到反射镜,以此来实现反射镜的偏转。快摆镜结构如图2所示。
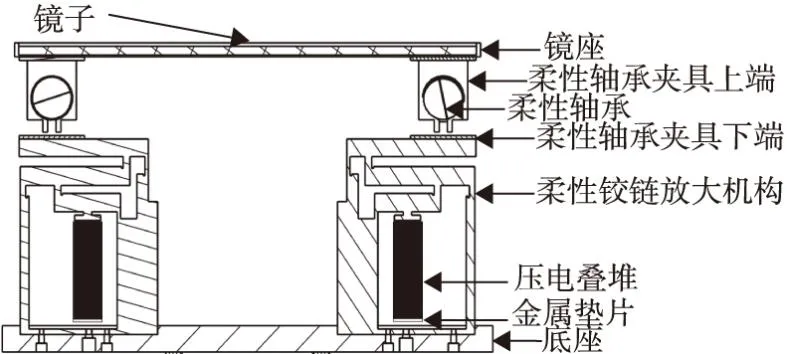
图2 快摆镜结构示意图
1.2 作动器的选择
调查快摆镜研究现状发现,如今用来驱动快摆镜的微位移机构以压电陶瓷作动器和音圈电机作动器为主。
压电陶瓷作动器是利用压电陶瓷逆压电效应,即在压电陶瓷两端施加一定的电压时,压电陶瓷可以伸长,压电陶瓷的输出力与陶瓷片面积相关,输出位移与压电陶瓷层数相关。音圈电机是利用了洛伦兹力原理制造出的电机,其工作原理是通过改变线圈中电流的大小和方向来控制线圈体在磁场作用下的运动。跟音圈电机相比[13],使用压电陶瓷作动器可使快摆镜的结构更紧凑,设计灵活,且压电作动器的频率响应更快,能推动更高的负载,几乎不受电磁干扰的影响。
本设计选用的压电陶瓷作动器基本参数如表1所示。为了实现更大的位移输出,使之满足快摆镜的转动范围,将两个方形压电叠堆粘在一起使用,在结构上串联,在电路上并联。
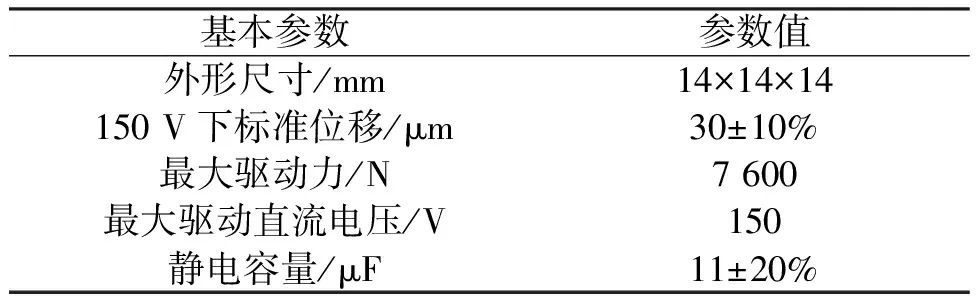
表1 压电作动器基本参数
1.3 柔性铰链放大机构的设计
压电陶瓷作动器是利用压电陶瓷的逆压电效应实现位移输出的装置,其具有精度高,响应速度快,输出作用力大等优点[14]。如图3所示,为了获取较大的变形量,压电作动器采取叠层片式结构,将压电陶瓷片采用机械上串联、电学上并联的方式组成叠堆式压电陶瓷。但仅通过压电作动器无法满足大口径快摆镜偏转范围的要求,所以需要设计一种机构来放大压电作动器的位移。杠杆式的微位移放大机构的结构相对简单,且放大倍数可通过调节杠杆长度改变。因此,本文设计了一种三级杠杆式的放大机构,其工作原理如图4所示。由图4可见,A点为压电作动器输出点,B点为一级杠杆放大部分的支点,C点为一级杠杆放大部分的输出点,D点为二级杠杆放大部分的支点,E点为二级杠杆放大部分的输出点,F点为三级杠杆放大部分的支点,G点为三级杠杆放大部分的输出点,即为最后放大部分的输出点。
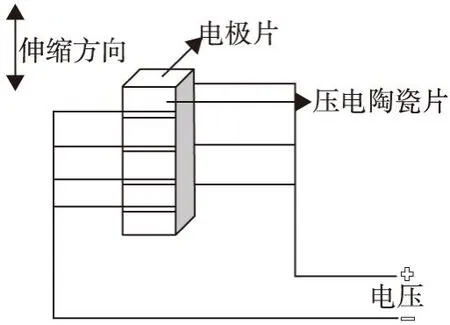
图3 叠堆式压电陶瓷结构示意图
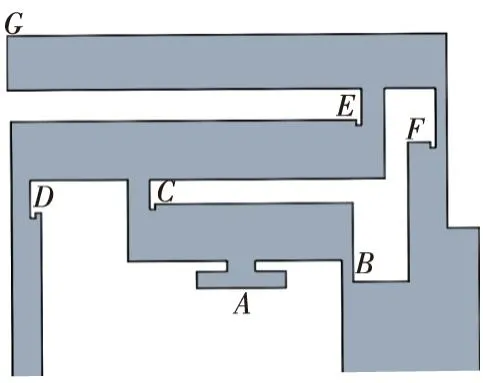
图4 三级杠杆式柔性铰链放大机构
根据图5所示的结构尺寸,考虑到快摆镜可能应用在极低温环境,为防止放大机构的变形,选用钛合金材料加工放大机构。对柔性铰链放大机构做有限元的静力学仿真来验证放大倍数,在A点处以10 μm间隔施加10~50 μm向上的位移输出,得到放大机构的仿真结果如图6所示。有限元仿真的计算结果如图7所示。同时为验证柔性铰链能否在低温下使用,施加温度场后仿真的计算结果表2所示。由表2可见,设计得到的三级杠杆式柔性铰链放大机构位移可放大约6.5倍,这为大口径快摆镜的角度偏转提供了保障。
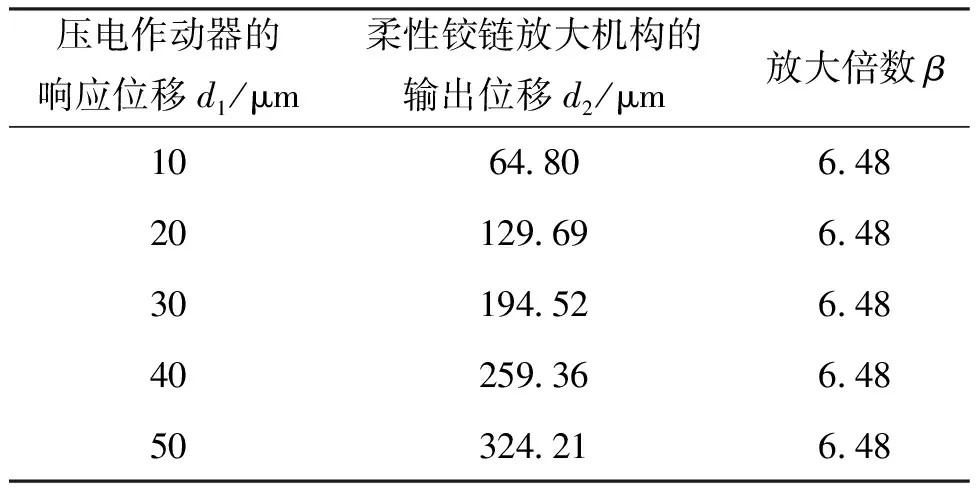
表2 有限元分析结果
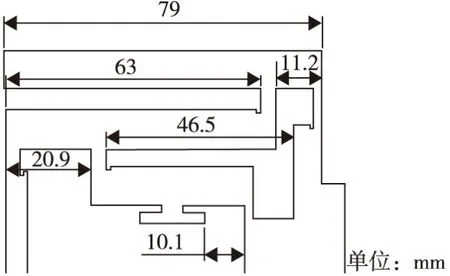
图5 柔性铰链放大机构尺寸图
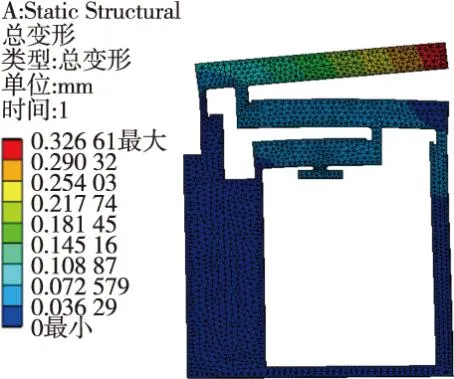
图6 柔性铰链放大机构变形图
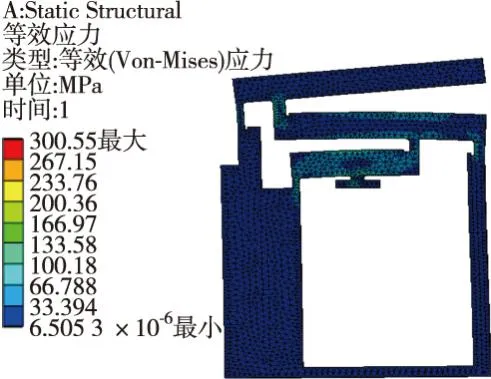
图7 柔性铰链放大机构等效应力图
1.4 电阻式应变片传感器设计
由于压电作动器具有迟滞特性和蠕变特性[15],在精密驱动与控制领域中,因电阻式应变片具有响应快、价格低及结构简单等特点,常使用其作为闭环控制的反馈传感器。由于压电驱动器的位移不是直接作用在快摆镜上,而是通过柔性铰链放大机构进行放大,所以将电阻应变片粘贴在压电作动器表面不能实现闭环控制,而需要将应变片粘贴在放大机构上。对于放大机构,输出端在G点,第三级支点F处的位移量也较大,且有足够空间粘贴应变片来进行反馈。应变片粘贴位置如图8所示。结合放大机构尺寸和使用需求,选用广测电子有限公司BF-H120-3AA-D300型号的应变片。
图8 电阻应变片粘贴位置示意图
1.5 柔性支撑顶结构设计
在精密驱动与控制研究领域中,由于传统的接触副元件无法满足高精度的传动,而柔性原件具有精度高、摩擦小等优点,故现多采用柔性元件作为微位移输出机构运动关节。
采用柔性铰链作为运动关节可以解决快摆镜机构高频的微小位移运动。经过广泛调研,选用一种单回转自由度的柔性铰链,它的回转维度是中间固定,两端可以沿着圆柱方向转动。与传统割槽的柔性铰链结构相比,它的刚度相对较好,但是这种柔性轴承的加工工艺复杂,对材料要求较高。目前已经克服了这种柔性轴承的加工问题,此类型产品如图9所示。传统切口型的柔性铰链行程较小,且寿命较短,而柔性轴承通过转动的形式进行了优化。本设计采用两端夹持柔性轴承的方法(见图10)将柔性轴承作为运动关节固定在快摆镜镜座与放大机构之间,保障了快摆镜的响应速度和运动精度。

图9 柔性轴承
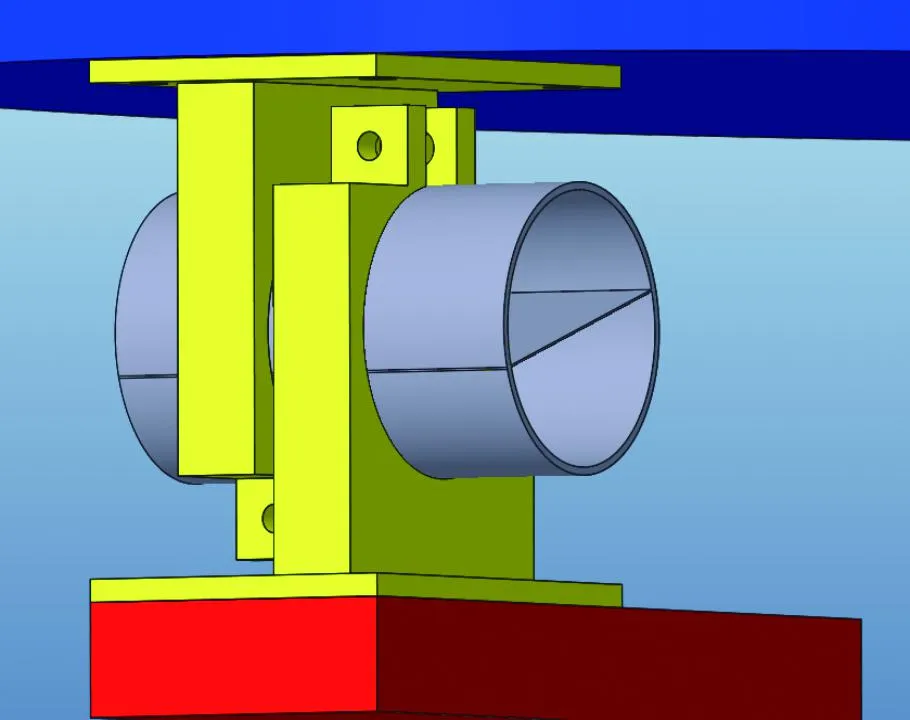
图10 运动关节处柔性轴承夹具示意图
2 模态仿真
对设计的基于柔性铰链的大口径快摆镜进行模态分析,进而对设计的快摆镜结构进行验证。在进行有限元分析前,对快摆镜的模型进行简化,将运动关节处的柔性轴承定义为转动副,采用ANSYS Workbench对快摆镜整体进行网格划分,设置好快摆镜各个部件及镜子的材料参数,定义底座上的螺孔为固定支撑后,开始进行有限元仿真。
表3为快摆镜选用的结构材料。常用镜体材料中,铍的密度最小,只有微晶玻璃的3/4;且材料比刚度最大,约为其他材料的4~6倍,选用铍镜可以减小镜体质量,降低转动惯量。本设计中反射镜形状为椭圆形,尺寸为280 mm×186 mm,厚度为5 mm。
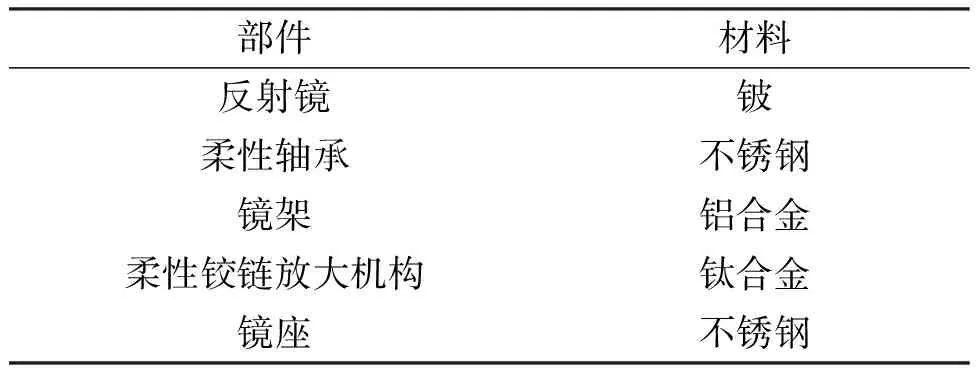
表3 快摆镜各个部件材料选择
通过有限元分析得到快摆镜的特征频率和特征振型,图11为快摆镜的前6阶振型图。表4为快摆镜前6阶特征频率。由图11可见,快摆镜机构的振型是关于平行于镜面的机械轴对称的,这主要是因为镜面的机械轴是对称布局。第四阶振型为本研究重点关注的重点摆动振型,由于谐振频率为394.36 Hz,超出了快摆镜设计的工作频率范围,理论上在快摆镜工作频率范围内不会发生谐振。

表4 快摆镜前6阶特征频率
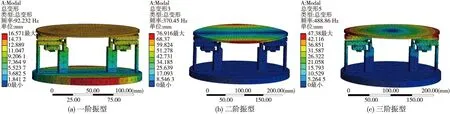
图11 快摆镜前6阶振型
3 实验与分析
3.1 工作原理及偏转角度分析
本文设计的快摆镜工作原理:由于压电作动器只能通过施加在两端的电压进行伸长而不能收缩,因此,在驱动快摆镜工作时,首先施加驱动电压让两个压电作动器同时上升25 μm,使快摆镜镜面水平上升,增大其中一个压电作动器两端电压,使其再上升0~25 μm,而对另一个压电作动器,通过减小其两端的电压使其下降0~25 μm,由此实现了快摆镜的偏转运动。
在驱动电压作用下,其中一个压电陶瓷的输出位移为X1,另一个压电陶瓷输出位移为X2,所设计快摆镜为差分驱动工作方式,压电陶瓷的实际输出位移为X2-X1。考虑到使用柔性轴承作为快摆镜的运动关节,其对放大机构的输出位移影响可以忽略。因此,经过柔性铰链放大机构放大后作用在快摆镜镜座上的输出位移可表示为
ΔL≈β(X2-X1)
(1)
式中β为柔性铰链放大机构的放大倍数。
快摆镜的偏转角度可表示为
Δθ≈ΔL/(a/2)
(2)
式中a为镜子的长轴长度。
3.2 实验验证
为了验证其工作原理和快摆镜角度偏转结果,设计了大口径快摆镜性能及其测试系统,如图12所示。
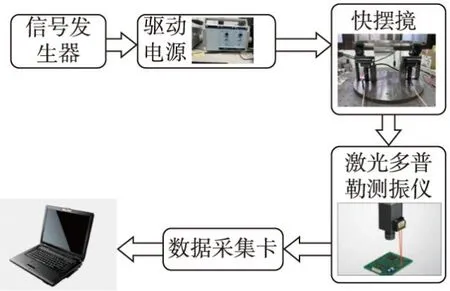
图12 测试平台系统框图
测试系统由信号发生器、压电作动器驱动电源、快摆镜、红外激光多普勒测振仪、数据采集卡和PC机组成。测试系统中的红外激光多普勒测振仪选用木木西里生产的传感器(KV-HB4525S),其测量精度为1.28 nm,量程为18 mm,采样频率为78.125 kHz。数据采集卡选用北京阿尔泰科技发展有限公司的8通道数据采集卡(USB3100),其采集频率可达20 kHz,搭建的测试平台如图13所示。
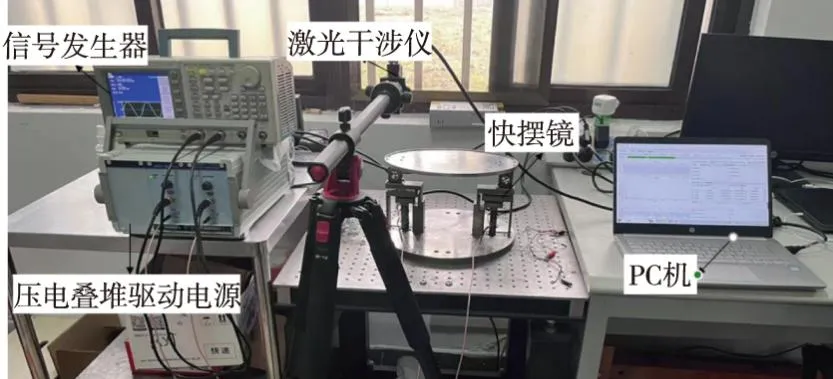
图13 测试平台系统实物图
信号发生器产生的驱动信号经过压电作动器驱动电源放大后,快摆镜中的压电作动器产生相应响应,通过柔性铰链放大机构将压电作动器产生的位移放大后传递到快摆镜的镜座上,引起快摆镜的角度偏转。通过红外激光多普勒测振仪测量快摆镜镜面上距离旋转轴线一定距离处的沿垂直方向的位移,可计算出快摆镜的实际偏转角。通过压电作动器驱动电源施加不同电压,首先从电压0开始,并以间隔10 V递增到150 V,之后从150 V递减到0,得到电压与偏转角的关系如图14所示。由图可见,快摆镜的偏转角随着驱动电压的升降而变化的正、反向曲线是非线性,这是由压电作动器的迟滞效应引起的,通过预反馈控制或闭环控制可进行修正。
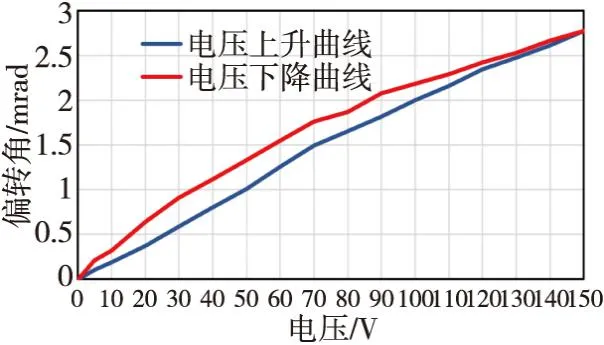
图14 电压-偏转角关系图
4 结束语
本文提出了一种大口径单轴偏转的压电快摆镜,研究其工作原理。针对大口径镜面导致快摆镜偏转角度范围较小的问题,设计了一款三级杠杆式的输出位移柔性铰链放大机构。采用柔性轴承作为运动关节提高了快摆镜的响应速度,分析了快摆镜的最大偏转角度、最大应变以及基本频率和振型。通过实验对设计出的快摆镜进行验证,结果表明,基于柔性铰链结构的压电快摆镜可以实现超过2 mrad的角度偏转,最大应力集中在放大机构的柔性铰链处为300 MPa。结构性能指标满足设计要求,但是压电作动器固有的迟滞效应和非线性的缺点较明显,需进一步研究并加以改善。
