基于改进模拟退火算法的工业机器人绝对定位精度提高
2024-03-29陈贵科饶志敏
黄 智,闵 杰, 2,陈贵科,饶志敏,辛 强,赵 寻
基于改进模拟退火算法的工业机器人绝对定位精度提高
黄 智1,闵 杰1, 2,陈贵科1,饶志敏3,辛 强3,赵 寻3
(1. 电子科技大学机械与电气工程学院,成都 611731;2. 中国船舶集团有限公司第七一○研究所,宜昌 443003;3. 中国科学院光电技术研究所,成都 610207)
工业机器人在抛光大口径光学元件时由于其较低的绝对定位精度,使得加工元件较难达到较高的面形精度.本文提出一种通过考虑测量坐标系与机器人基坐标系之间的转换误差、机器人的运动学误差以及机器人法兰端到工具坐标系的测量误差等多误差源构建工业机器人综合误差模型的校准方法.通过仿真实验与PSO、AFSA、SA算法进行对比,证明改进后的Be-SA算法在辨识误差参数时具有更快的收敛速度和更高的精度.实验结果表明通过Be-SA算法辨识后的KUKA KR 120 R3900的平均绝对定位误差由2.497mm降低为0.321mm,最大绝对定位精度由3.358mm降低为0.961mm,构建的综合误差模型在辨识运动学误差参数时具有良好的适用性,改进后的Be-SA算法能有效提高机器人的绝对定位精度,对于磨抛大口径光学元件的性能提升具有重要参考价值.
工业机器人;绝对定位精度;模拟退火算法;误差模型

因此本文充分考虑上述误差因素,通过分析测量坐标系与机器人基坐标系之间的转换误差、机器人的运动学误差以及机器人法兰端到工具坐标系的测量误差,基于工业机器人的DH模型构建误差模型.通过基于SA算法改进后的Be-SA算法对误差参数进行辨识,并通过仿真实验与传统PSO、AFSA、SA算法进行对比,证明改进后的Be-SA算法在辨识误差参数时具有更快的收敛速度和更高的精度.最后进行实验验证,Be-SA算法对提升机器人的绝对定位精度具有较好的效果.
1 误差模型与辨识方法的数学模型
1.1 误差模型的建立
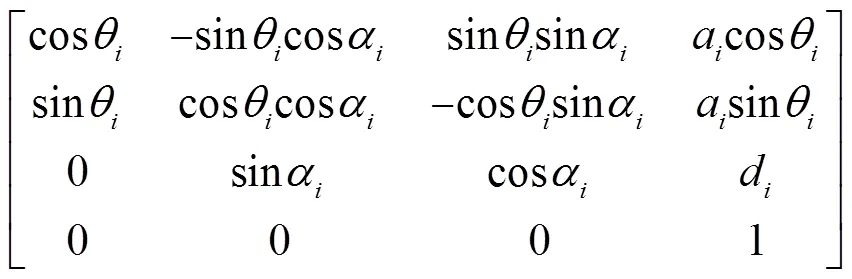
工业机器人的运动学模型以1955年Danevit和Hartenberg提出的DH模型[11]的使用最为广泛,该模型以连杆长度、连杆扭角、关节变量和关节偏置作为辨识参数,将每个关节的坐标系通过一定规则固定在连杆上,各个坐标系之间通过其次变换矩阵进行坐标转换,即


而测量坐标系到机器人的基坐标系转换矩阵为

机器人的法兰端到工具坐标系的转换中不用考虑其位姿变化,则转换矩阵为

则名义上激光跟踪仪测得的靶球的位置为


则实际位置与名义位置的误差为
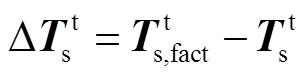



其中
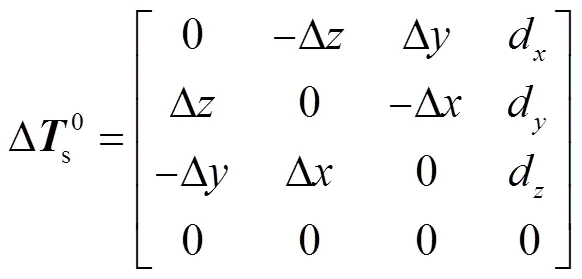
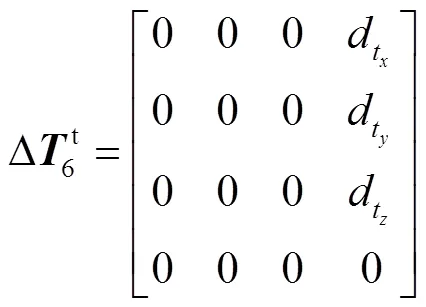

舍弃掉高阶无穷小分量则有


1.2 目标函数的建立
由于以提高绝对定位位置精度为目的,因此忽略位姿误差,于是目标函数采用平均绝对定位精度作为指标,即

1.3 Be-SA算法



步骤4进行判断.

否则不接受该解,继续进行迭代.


图1 算法优化流程
随着温区的变化,为避免在低温区跳过关键位置,衰减率逐渐降低,则温度的更新如下:

2 仿真验证
为确保改进后的Be-SA算法确实能有更快的收敛速度和更高的寻优精度,故通过设计该仿真实验来进行验证,同时与文献[17]中提到的SA算法、粒子群优化(particle swarm optimization,PSO)算法和人工鱼群算法(artificial fish school algorithm,AFSA)进行对比,后文中算法表达均用字母进行表示.
2.1 仿真数据设置
采用KUKA KR 120 R3900机器人进行仿真,仿真验证流程如图2所示,其DH运动学参数见表1.参考他人辨识结果大小范围[18],在该范围内随机生成这33个误差参数,在这些预设的误差参数作用下产生位置误差,将其用于智能算法辨识,最后根据辨识求解得到的误差参数产生的位置误差,与预设的这些误差参数产生的位置误差进行作差对比,根据作差结果越小就表明辨识的越准确,从而用于评价智能算法的有效性.预设的运动学误差参数如表2所示,测量坐标系到基坐标系、法兰坐标系到工具坐标系的误差参数预设如表3所示.
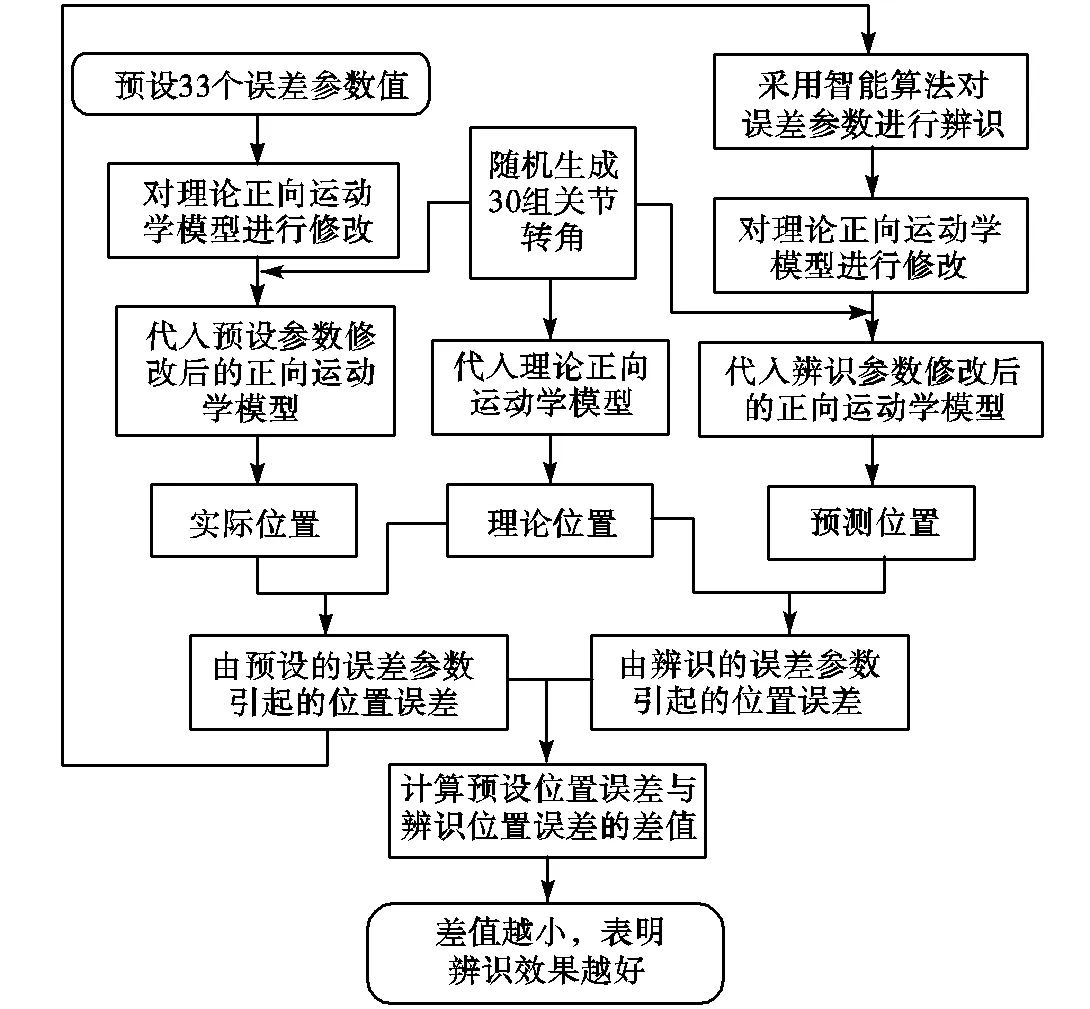
图2 仿真验证流程
表1 KUKAKR 120 R3900机器人DH运动学模型参数
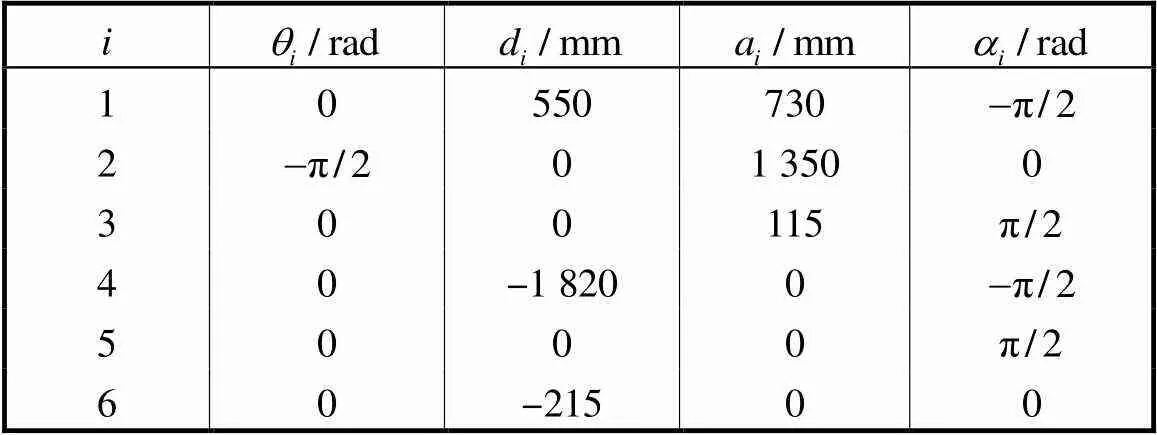
Tab.1 Nominal parameters of the DH kinematics model of the KUKA KR 120 R3900 robot
表2 KUKAKR 120 R3900机器人运动学误差参数

Tab.2 Kinematics error parameters of the KUKA KR 120 R3900 robot
表3 各坐标系转换误差参数

Tab.3 Conversion error parameters of each coordinate system


只考虑位置误差,设置目标函数为
2.2 仿真结果与讨论
分别采用改进后的Be-SA、SA、PSO、AFSA算法以式(20)为目标函数进行寻优,其目标函数值收敛如图3所示,30组位置误差对比如图4所示.由于算法初始值均随机生成,则各个算法的初始点均有所不同.
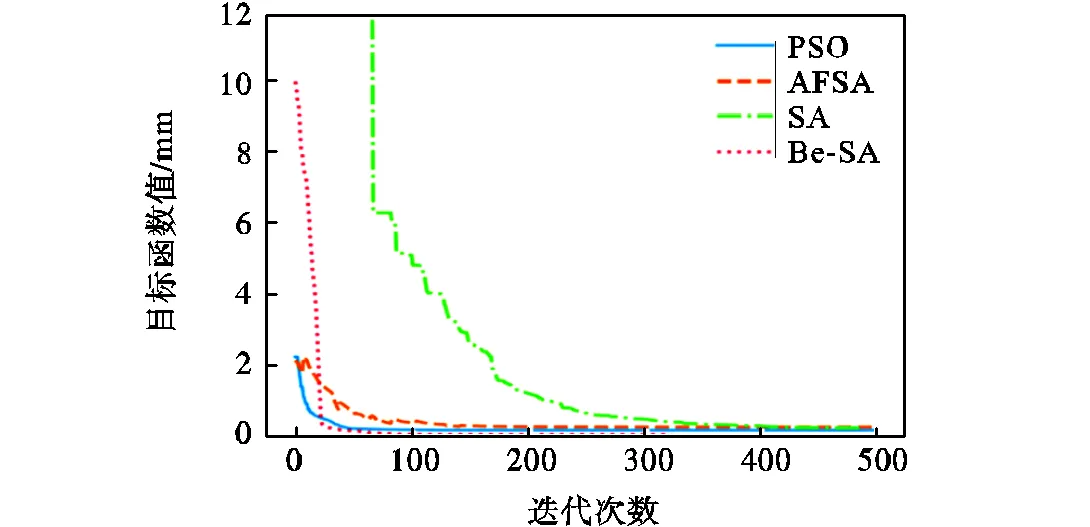
图3 不同优化算法目标函数值收敛
图3可以看出Be-SA算法具有最快的收敛速度,PSO算法相较于SA算法和AFSA算法具有较快的收敛速度,同时SA算法能有效跳过局部最优,但收敛最慢,而AFSA易陷入局部最优.从图4和表4可以看出Be-SA算法相较于其他3种算法具有最高的预测精度,且数据整体波动较小,能有效避免某点位置误差较大的情况出现.

图4 不同优化算法位置误差对比
表4 不同优化算法的仿真结果对比

Tab.4 Comparison of the simulation results of different optimization algorithms
因此相较于SA算法的完全随机方向寻优,由于本文通过改进搜索步长和对衰减率在不同温区的表现优化,改进后的Be-SA算法在工业机器人的运动学误差参数的辨识上具有更快的收敛速度和更高的寻优精度.
3 误差参数辨识实验
图5为离线误差补偿流程,图6为工业机器人的实验现场,采用的机器人为KUKA KR 120 R3900,靶球通过磁铁吸附的方式安装在工具末端,采用激光跟踪仪测量靶球位置,并导入进测量计算机中.靶球相对于机器人法兰端的位置已测量好存入示教器中.
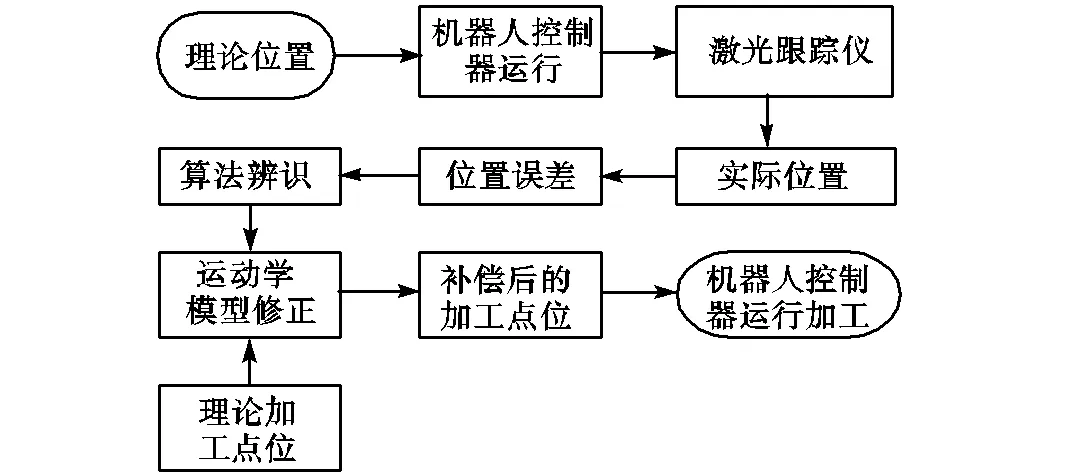
图5 误差补偿流程
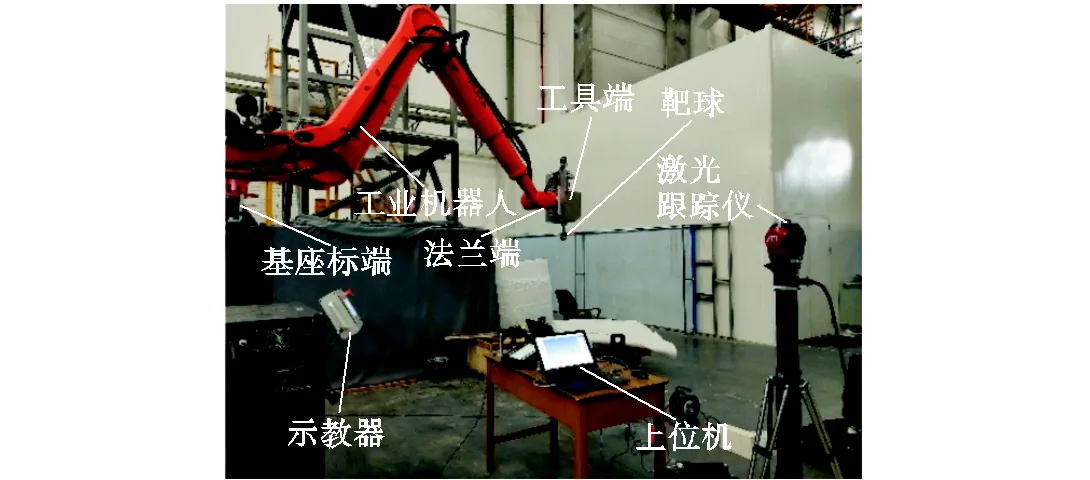
图6 实验现场
3.1 基于Be-SA的误差参数辨识
由于在第2节的仿真实验中证明了Be-SA算法具有更快的收敛速度和更高的寻优精度,于是采用该算法对实验结果进行处理.首先采用蒙特卡洛方法生成机器人的工作空间,KUKA KR 120 R3900的工作空间如图7所示,使用随机选取的方法在工作空间内随机选取100个点,通过示教器控制点位移动到随机选取点,并采用激光跟踪仪进行测量得到其误差.对于选取的100个点误差,采用式(14)作为目标函数通过Be-SA算法进行迭代寻优,其目标函数值收敛如图8所示,最终求得目标函数全局最优解为0.254mm.
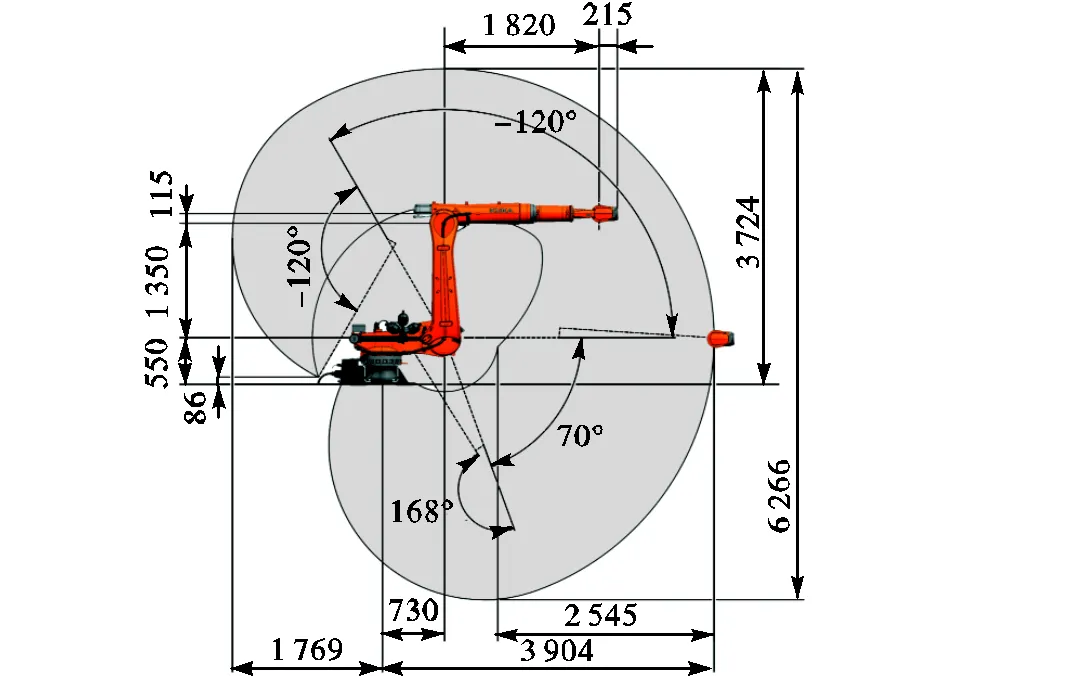
图7 KUKA KR 120 R3900的工作空间(单位:mm)
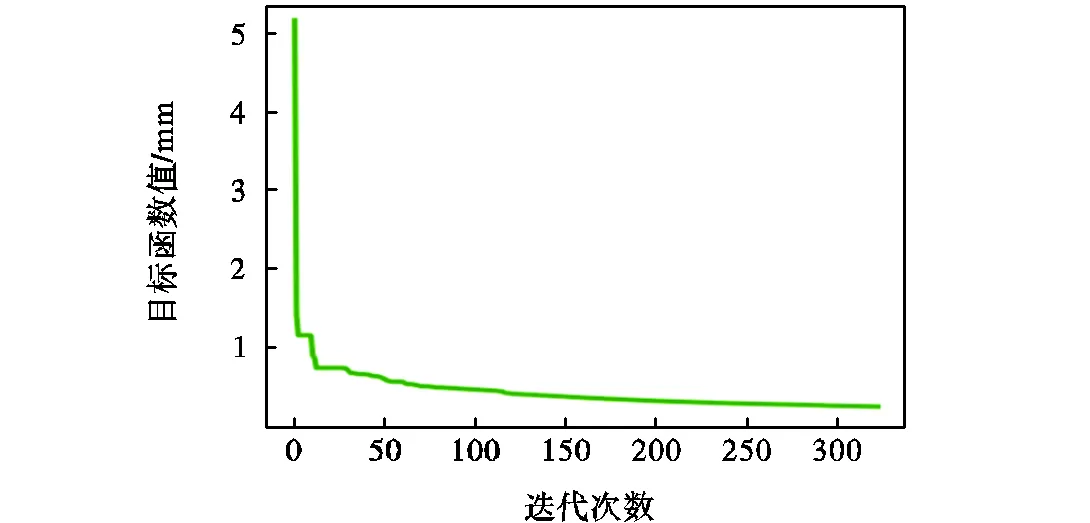
图8 目标函数值收敛
3.2 分析与讨论
通过采用图9的空间立方体布点方式来对第3.1节求得的最优解进行验证.通过Be-SA算法辨识后的误差参数,将这些误差参数对原来的机器人参数进行标定,将标定后的结果与实验测量结果进行对比,其误差参数标定前后结果对比如表5所示,位置误差对比如图10所示.

图9 验证点的选取
表5 误差参数标定前后结果对比

Tab.5 Comparison of results before and after error pa-rameter correction
从图10可以看出,标定后的位置误差曲线波动较小,证明Be-SA算法辨识得到的误差参数具有很好的适用性,能很好地普遍应用于机器人绝对定位精度提升中.从表5可以看出,经过标定后机器人绝对定位平均精度从2.497mm提升至0.321mm,最大误差从3.358mm降低至0.961mm,证明Be-SA算法对于机器人的绝对定位精度的提升有着良好的作用.同时由于充分考虑了测量坐标系与机器人基坐标系和机器人法兰坐标系与工具坐标系之间的测量误差,使得误差来源的辨识更加详细,因此具有很好的广泛应用性,以及拥有更高的绝对定位精度.
但在实际过程中,由于机械臂的自重、温度、齿轮间隙等一系列非运动学的影响,会同样对机器人末端造成误差,并且这些误差因素无法通过辨识运动学参数的方法辨识出来.但仍有迹可循,从图9可以看出,试验点是按照立方体一个一个选取,而观察图10标定前的曲线和标定后的曲线,其误差分布按照每隔几点重复相同误差的规律变换.因此可以表明,随着选取测量点网格的变化,位置误差也在随之有规律地变化,这为接下来非运动学误差的辨识研究提供了方向.
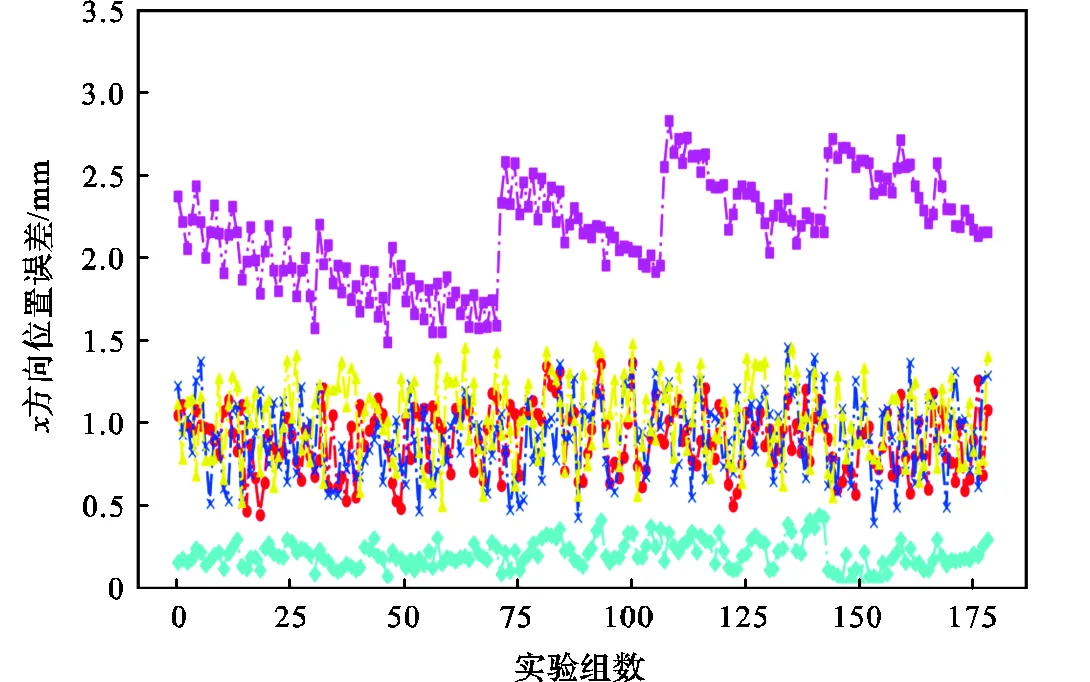
(a)方向位置误差标定前后对比
(b)方向位置误差标定前后对比
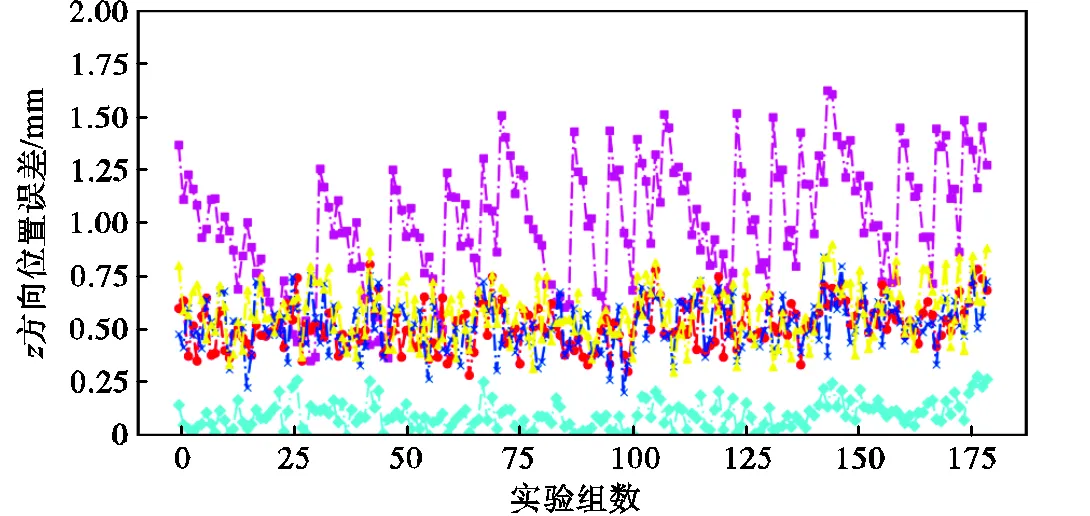
(c)方向位置误差标定前后对比
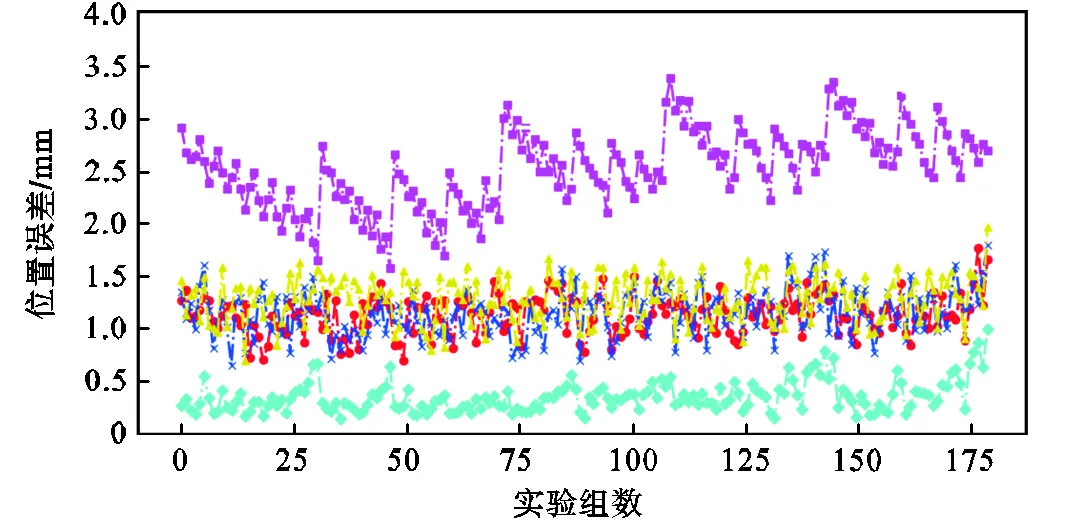
(d)总体位置误差对比

图10 位置误差对比
4 结 论
(1)本文充分考虑了测量坐标系与机器人基坐标系之间的转换误差、机器人的运动学误差以及机器人法兰端到工具坐标系的测量误差,使得产生位置误差的因素更为详细明确,为接下来的优化算法辨识提供良好支撑.
(2)基于SA算法提出了一种Be-SA算法,通过仿真实验表明该算法相较于传统SA算法在工业机器人的运动学误差参数的辨识上具有更快的收敛速度和更高的寻优精度,且相较于传统PSO、AFSA算法,改进后的算法同样具有上述优点.通过实验表明,机器人的绝对定位精度有了大幅度提升,为抛光学元件奠定了关键基础.
(3)本文的研究未考虑到非运动学参数对位置误差的影响,因此还需在接下来的研究中弄清楚非运动学误差相对于空间点位的影响规律,从而还能进一步提高机器人的绝对定位精度.
(4)由于本文只考虑了机器人的位置误差,忽略了位姿误差,在加工简单平面时,会对平面的平面度等造成影响.因此加工简单平面时使用本方法,还需对位姿误差做更进一步研究.
[1] 周 炜,廖文和,田 威. 基于空间插值的工业机器人精度补偿方法理论与试验[J]. 机械工程学报,2013,49(3):42-48.
Zhou Wei,Liao Wenhe,Tian Wei. Theory and experiment of industrial robot accuracy compensation method based on spatial interpolation[J]. Journal of Mechanical Engineering,2013,49(3):42-48(in Chinese).
[2] Joubair A,Bonev I A. Kinematic calibration of a six-axis serial robot using distance and sphere constraints[J]. International Journal of Advanced Manufacturing Technology,2015,77(1/2/3/4):515-523.
[3] 齐俊德,张定华,李 山,等. 考虑测量空间的机器人绝对定位精度标定[J]. 机械科学与技术,2020,39(1):68-73.
Qi Junde,Zhang Dinghua,Li Shan,et al,Calibration of absolute positioning accuracy of robots considering measurement space[J]. Mechanical Science and Technology,2020,39(1):68-73(in Chinese).
[4] 朱江新,刘吉刚,田 硕,等. 两步误差补偿法提高工业机器人绝对定位精度[J]. 机械科学与技术,2020,39(4):547-553.
Zhu Jiangxin,Liu Jigang,Tian Shuo,et al. Two-step error compensation method for improving absolute positioning accuracy of industrial robots[J]. Mechanical Science and Technology,2020,39(4):547-553(in Chinese).
[5] 温秀兰,康传帅,宋爱国,等. 基于全位姿测量优化的机器人精度研究[J]. 仪器仪表学报,2019,40(7):81-89.
Wen Xiulan,Kang Chuanshuai,Song Aiguo,et al. Study on robot accuracy based on full pose measurement and optimization[J]. Chinese Journal of Scientific Instrument,2019,40(7):81-89(in Chinese).
[6] 房立金,党鹏飞. 基于量子粒子群优化算法的机器人运动学标定方法[J]. 机械工程学报,2016,52(7):23-30.
Fang Lijin,Dang Pengfei. Kinematic calibration method of robots based on quantum-behaved particle swarm optimization[J]. Journal of Mechanical Engineering,2016,52(7):23-30(in Chinese).
[7] Luo Guoyue,Zou Lai,Wang Ziling,et al. A novel kinematic parameters calibration method for industrial robot based on Levenberg-Marquardt and differential evolution hybrid algorithm[J]. Robotics and Computer-Integrated Manufacturing,2021,71:102165.
[8] Hsiao J C,Shivam K,Lu I F,et al. Positioning accuracy improvement of industrial robots considering configuration and payload effects via a hybrid calibration approach[J]. IEEE Access,2020,8:228992-229005.
[9] Jiang Yizhou,Yu Liangdong,Jia Huakun,et al. Absolute positioning accuracy improvement in an industrial robot[J]. Sensors,2020,20(16):4354.
[10] Yuan Peijiang,Chen Dongdong,Wang Tianmiao,et al. A compensation method based on extreme learning machine to enhance absolute position accuracy for aviation drilling robot[J]. Advances in Mechanical Engineering,2018,10(3):1687814018763411.
[11] Denavit J,Hartenberg R S. A kinematic notation for lower-pair mechanisms based on matrices[J]. Journal of Applied Mechanics,1955,77(2):215-221.
[12] Qi Junde,Chen Bing,Zhang Dinghua. A calibration method for enhancing robot accuracy through integration of kinematic model and spatial interpolation algorithm[J]. Journal of Mechanisms and Robotics,2021,13(6):061013.
[13] Metropolis N,Rosenbluth A W,Rosenbluth M N,et al. Equation of state calculations by fast computing machines[J]. The Journal of Chemical Physics,1953,21(6):1087-1092.
[14] İlhan İ. An improved simulated annealing algorithm with crossover operator for capacitated vehicle routing problem[J]. Swarm and Evolutionary Computation,2021,64:100911.
[15] 黄 智,刘永超,廖荣杰,等. 基于SSO算法优化神经网络的数控机床热误差建模[J]. 东北大学学报(自然科学版),2021,42(11):1569-1578.
Huang Zhi,Liu Yongchao,Liao Rongjie,et al. Thermal error modeling of numerical control machine tools based on neural network by optimized SSO algorithm[J]. Journal of Northeast University(Natural Science Edition),2021,42(11):1569-1578(in Chinese).
[16] Li Xin,Ma Xiaodong. An improved simulated annealing algorithm for interactive multi-objective land resource spatial allocation[J]. Ecological Complexity,2018,36:184-195.
[17] 韩 龙,张 娜,汝洪芳. 人工智能算法:原理、技巧及应用[M]. 北京:清华大学出版社,2022.
Han Long,Zhang Na,Ru Hongfang. Artificial . Intelligence Algorithm:Principle,Skill and Application[M]. Beijing:Tsinghua University Press,2022(in Chinese).
[18] 周 炜. 飞机自动化装配工业机器人精度补偿方法与实验研究[D]. 南京:南京航空航天大学,2012.
Zhou Wei. Compensation Method of Industrial Robot Accuracy and Experimental Research for Aircraft Automated Assembly[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2012(in Chinese).
Improvement in Absolute Positioning Accuracy of Industrial Robot Based on Improved Simulated Annealing Algorithm
Huang Zhi1,Min Jie1, 2,Chen Guike1,Rao Zhimin3,Xin Qiang3,Zhao Xun3
(1. School of Mechanical and Electrical Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China;2. No. 710 R&D Institute,CSSC,Yichang 443003,China;3. Institute of Optics and Electronics,Chinese Academy of Sciences,Chengdu 610207,China)
Owing to the low absolute positioning accuracy of industrial robots during the polishing of large-diameter optical components,achieving high surface machining accuracy for processing components is challenging. This study proposes a calibration method to construct a comprehensive error model for industrial operating robots by considering multiple error sources,such as the conversion error between the measurement coordinate system and the robot base coordinate system,the kinematic error in the robot,and the measurement error from the robot flange end to the tool coordinate system. Based on the simulated annealing(SA)algorithm,the improved Be-SA algorithm identifies these error parameters. Based on simulation experiments,it can be observed that the improved Be-SA algorithm has a faster convergence speed in identifying error parameters and higher precision compared with the PSO,AFSA,and SA algorithms. Finally,the KUKA robot verification experiment was conducted. Results showed that the average absolute positioning error of the KUKA KR 120 R3900 robot identified using the Be-SA algorithm decreased from 2.497mm to 0.321mm. Moreover,the maximum absolute positioning accuracy decreased from 3.358mm to 0.961mm. This demonstrates that the comprehensive error model constructed herein has good applicability in identifying kinematics error parameters,and the improved Be-SA algorithm can effectively improve the absolute positioning accuracy of the robot,which is an important reference value with respect to the improvement in the grinding and polishing of large-aperture optical components.
industrial robot;absolute positioning accuracy;simulated annealing algorithm;error model
10.11784/tdxbz202208029
TP242
A
0493-2137(2024)04-0374-08
2022-08-21;
2023-03-06.
黄 智(1977— ),男,博士,副教授.
黄 智,zhihuang@uestc.edu.cn.
四川省科技计划资助项目(2021YFG0078).
the Science and Technology Plan Project of Sichuan Province,China(No. 2021YFG0078).
(责任编辑:王晓燕)
