基于DEA模型的山区公路视线诱导设施综合效用评价
2024-03-28杨艳群姚羽珊郑新夷
杨艳群, 黄 永, 姚羽珊, 郑新夷
(1.福州大学 土木工程学院, 福州 350116; 2.福州大学 交通心理与行为国际联合实验室, 福州 350116;3.福州大学 人文社会科学学院, 福州 350116)
0 引言
山区公路受地形地质、公路设计标准及建设资金等条件限制,弯道多、半径小,事故率高且重大事故比例大[1]. 据统计,我国山区公路的交通事故率占全部公路的15%以上[2],近36%的事故发生在弯道路段[3],而驾驶人通过弯道时注意力分散及对速度和弯道感知的模糊性与事故密切相关[4]. 事实上,驾驶过程中80%的交通信息来自视觉搜索[5],而山区公路弯道普遍存在视距不足等问题,因此通常在弯道段设置视线诱导设施以保证驾驶人及时感知道路线形变化,确保行车安全.
中外学者关于弯道路段的研究主要集中在驾驶员行车特性、心理影响等方面. A.CALVI[6]研究了弯道几何因素对驾驶行为的影响,结论表明,曲线半径和螺旋线显著影响驾驶速度和轨迹. 戚培心[7]发现弯道方向不会对视觉及行驶特性产生影响. Y.LI等[8]研究表明弯道半径会影响驾驶人对道路信息的感知-反应时间. 陈芳等[9]指出弯道半径越小驾驶员的心理压力越大,且左转弯的心理压力较右转弯更大. H.GODTHELP等[10-12]发现驾驶人的视觉分布与道路线形有关,曲线路段的注视点主要分布在内侧切点附近.
关于视线诱导设施的研究主要集中在视线诱导设施应用与对驾驶人心生理、驾驶行为等的影响方面. 常见的视线诱导设施包括线形诱导标、合流诱导标、轮廓标、隧道轮廓带、示警桩(墩)、道口标柱等[13]. 其中,线形诱导标、轮廓标以及护栏对等对改善山区公路行车环境有重要作用[14-16]. WU Yipin等[17]研究了线形诱导标对驾驶行为及心生理特性的影响,发现线形诱导标会导致注视时间变长,心率和车速降低. Dario Babi’c等[18]研究了线形诱导标的颜色对行驶速度和横向位移的影响,发现荧光底与白底的红色箭头对弯道降速最明显且横向位移最小. 赵晓华等[19]研究了隧道反光环、轮廓标、突起路标对驾驶行为和视觉行为的综合影响,为隧道视线诱导设计提供参考. 陈君朝等[20]通过实车实验探究了轮廓标反光面大小对驾驶人注视时间和眼跳幅度的影响,发现反光膜的尺寸为15 cm效果最佳. YANG Yanqun等[21]研究了高速公路出口黄色护栏带对驾驶人脑电、眼动和驾驶行为的影响,发现黄色护栏带显著提高了驾驶人的警惕性. Salar Sadeghi等[22]研究了护栏对公交司机驾驶行为的影响,发现护栏降低了驾驶人行驶速度和横向位移. GUAN Wei等[23]指出平曲线的减速行为与驾驶员的反应与获得的信息量相关. 张程程等[24]分析了草原公路曲线段指示标志对驾驶员脑电的影响,发现指示标志对驾驶员的脑电信号β、(θ+α)/β有显著影响.
综上,中外学者在公路弯道以及视线诱导设施对驾驶人心生理和行驶特性的影响进行了一定的研究,但大多研究从单个视线诱导设施的有效性出发,很少涉及不同视线诱导设施组合设置对山区弯道安全的影响;其次,我国JTGD—2017《公路交通安全设施设计规范》[25]、GB 5768.2—2022《道路交通标志和标线 第2部分:道路交通标志》[26]等相关规范缺乏山区公路视线诱导设施的详细设置标准;同时,大多研究都是单独针对视觉、脑电或驾驶行为的定性研究,国内外对山区公路弯道视线诱导设施设置综合效用的评价研究相对缺乏.
数据包络分析(Data Envelopment Analysis,DEA)具有无需确定各个指标权重[27]、客观性强、不必量纲归一化处理等优点,目前在资源配置[28]、交通运输[29]、医疗卫生[30]等方面的效率评价应用广泛. 杨艳群等[31]利用DEA方法评价了标志版面信息量对驾驶人认知反应的影响,为标志版面地名数设置提供参考. 徐建闽等[32]将DEA方法引入交叉口信号控制效率的评价,为信号控制效率评价提供了新方法. 戴学臻等[33]构建了快速路车流运行状态安全性评价DEA模型,为快速路的交通安全分析与设施设计提供指导. 综上所述,为了确定最佳的山区公路弯道视线诱导设施的设置方案,本文基于驾驶模拟实验获得眼动、驾驶行为和脑电数据构建评价指标体系,引入DEA中的超效率BCC模型求解得到不同场景的综合效率值,以此探究最优布设方案,同时对指标进行指标敏感性分析,探讨不同决策单元失效的原因,为山区公路弯道路段的视线诱导设计提供依据.
1 驾驶模拟实验
1.1 实验仪器设备
实验采用DSR-1000TS2.0型驾驶模拟系统作为测试平台,主要由驾驶舱和控制台,外加由3台60寸4K液晶显示器组成,用于采集被试的驾驶行为特征、汽车动力学特性等;眼动数据和脑电数据分别采用Dikablis眼动仪和NE无线脑电仪获取. 其中眼动仪采样频率为60 Hz,精度为0.1~0.3°;脑电可实现32通道、500SPS采样频率、24 bit分辨率的脑电数据采集.
1.2 视线诱导设施设置方案及场景
1.2.1 实验场景以及方案
以日间双车道山区公路作为实验研究场景,设计速度为60 km/h,仿真对象为1段典型弯道,如图1所示,实验路段由直线和曲线2部分组成,其中弯道路段的曲线半径约250 m,直线路段长1 km.
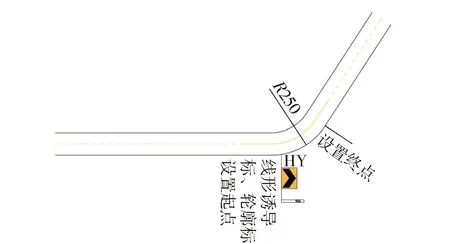
图1 实验场景平面
1.2.2 实验场景设计
本文根据JTGD—2017《公路交通安全设施设计规范》等相关规范选取线形诱导标、护栏以及轮廓标作为研究对象,但相关规范针对视线诱导标志的设置位置并不明确,综合考虑国内外研究,视线诱导标志的设置起点选择在缓圆点[34-35],组合设置时以护栏为基准轮廓标和线形诱导标分别设置在护栏内外边线,间距、颜色、高度等其他参数均按照国家规范设置. 综上,本文研究以线形诱导标、护栏以及轮廓标单独或者组合设置形成的7种实验方案,并以空白组作为对照组共形成8组实验方案如表1所示.
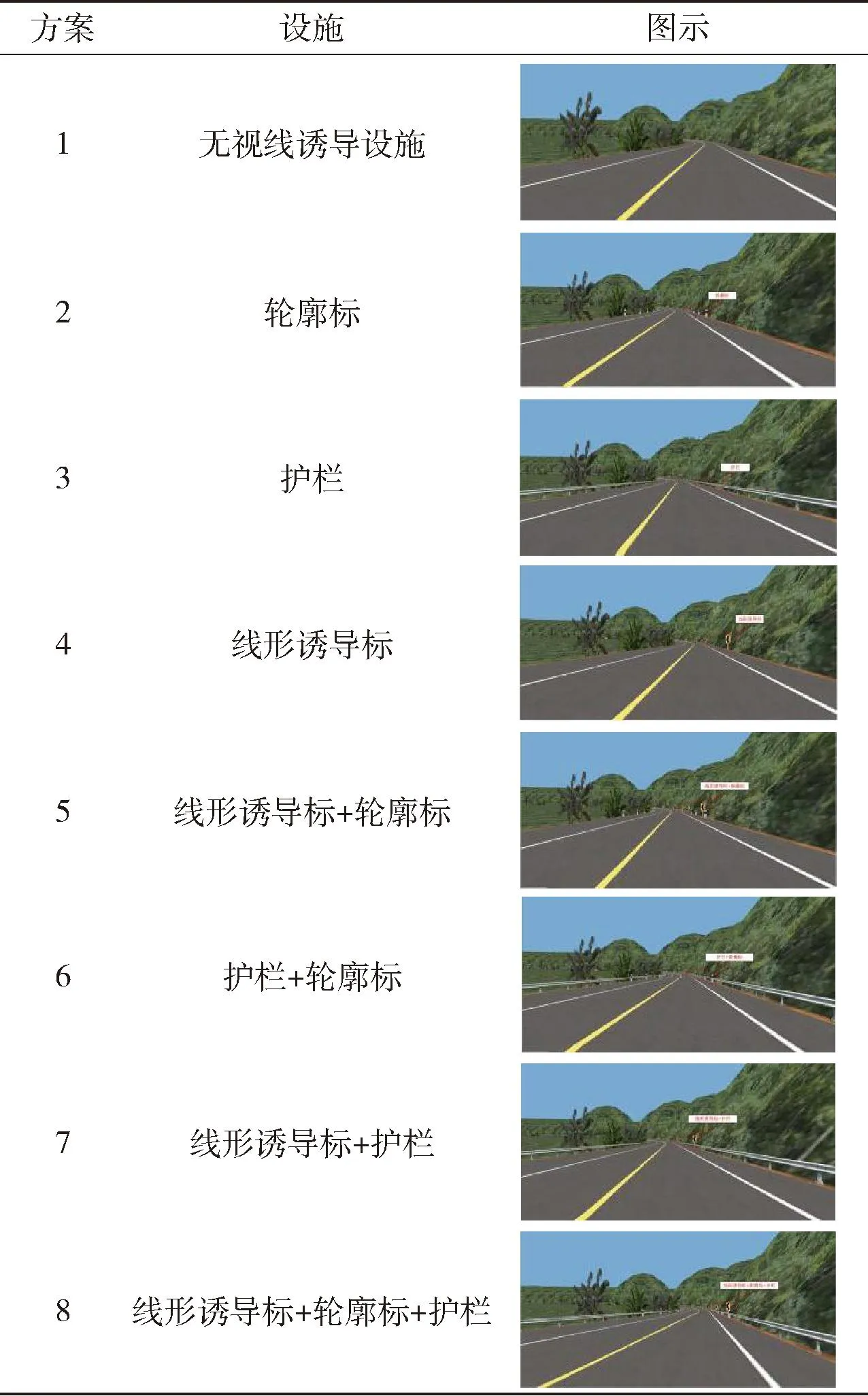
表1 视线诱导设施设置方案
1.3 实验被试
本次实验共招募46名被试,要求驾龄2 a以上,男女比例1∶1,年龄区间为22~28岁,平均年龄24岁,矫正后视力均在1.0以上,无色盲色弱.
1.4 实验过程
驾驶模拟实验过程如下:
1)为被试讲解实验注意事项,要求被试填写基本信息;
2)在非实验场景中试驾10 min;
3)正式实验时,实验人员为被试佩戴眼动仪和脑电仪,驾驶人自由选择8个场景实验的顺序进行实验,为避免疲劳驾驶,场景切换时要求被试休息5 min.
1.5 数据采集
在1.2.2中设计了8个场景,分别收集各个场景的数据,数据收集段为第1次观察到视线诱导设施到通过整个弯道部分.
2 评价方法
2.1 BCC模型
数据包络分析由Charnes等[36]提出,是采用数学规划模型评价具有多输入和多输出的同类决策单元(decision making unit,DMU)相对效率的方法. Banker等[37]在此基础上提出了BCC模型,BCC-DEA模型具体计算方法为,假设系统有n个DMU,每个DMU有m个输入指标和s个输出指标. 则评价第j0个DMU的BCC-DEA模型为:
(1)
(2)

2.2 超效率DEA
上述BCC-DEA模型可判断DMU的有效性,但当决策单元出现同时有效时并不能对其进行比较和分析. Andersen为解决这一问题在传统DEA模型的基础上提出了超效率DEA模型[38],该模型允许计算出的效率值超过1,从而达到对DMU进行充分的比较和排序的目的. 其表达式为式(3).
此外,DEA方法还可通过对单个输入或输出指标的剔除从而计算出各指标对系统综合效率的影响情况,识别导致系统效率相对无效的关键因素.设D为原始完整的评价指标集,Di为剔除指标i之后新的评价指标集,θa(D)和θa(Di)分别为DMUa在指标集D和指标集Di下的综合效率值.Sa(i)为DMUa在剔除指标i之后的综合效率指数,Sa(i)的计算式见(4)[39].
在无效的DMUh中,若指标i1和指标i2分别满足Sh(i1)=minSh(i)和Sh(i2)=maxSh(i),说明i1对DMUh的无效性影响最小,i2对DMUh的无效性影响最大.若i1和i2为输入指标,说明i2所对应的投入较大,i1所对应的投入相对较小;若i1和i2为输出指标,说明i2所对应的产出较小,i1所对应的产出相对较大.
(3)

(4)
2.3 评价指标
2.3.1 眼动指标
1)累计注视时间:注视者对某一目标在一段时间内的注视时间,表征视线诱导设施的醒目性和警觉性.
2)瞳孔面积:驾驶期间瞳孔大小平均值,可表征驾驶人在不同场景中行驶时的紧张程度.
2.3.2 驾驶行为指标
1)横向位移:指车辆在弯道行驶时于道路中线的横向偏移量,表征车辆行驶的平稳程度,同时反映出驾驶人的警觉程度,该值越大,危险越高. 本文将远离中线的偏移设置为正值,靠近中线的偏移量为负值,计算在每100 ms单位时间内车辆行驶时的车道偏移量绝对值的平均数.
2)车速:指测量时间段内的平均速度,车辆速度可反映出视线诱导设施的控速效果,速度越小,表明减速效果越好.
2.3.3 脑电指标
1)θ波:脑电波中的慢波,对称出现在大脑双侧,本文通过Matlab得到脑电指标的绝对功率值,θ波绝对功率越大表明驾驶人注意力越集中.
2)β波:脑电波中的快波,β波绝对功率值越大表征驾驶人受到外部的刺激,警惕性越高,本文将β绝对功率值波取其倒数1/β作为输入指标.
2.4 评价体系构建
利用DEA对决策单元进行效率评价时,输入输出指标需要具有同向性,即系统投入越低而产出效益越高时当前的决策单元效率越高;故输入输出指标在选取时应分别符合越小越优和越大越优的特点. 因此,建立模型前需要根据模型原理及研究目标对输入、输出指标值进行标准化,本文将指标β波绝对功率值标准化为1/β. 综上,本文输入指标选取1/β、速度和横向位移,输出指标选取累计注视时间、瞳孔面积和θ波绝对功率值. 由此构建了山区公路弯道视线诱导设施的效率评价指标体系,如图2所示.
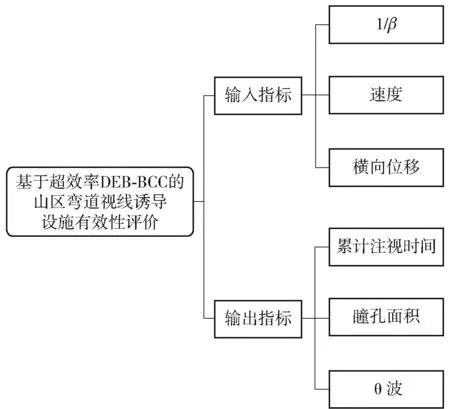
图2 山区弯道视线诱导设施有效性评价体系
3 实验结果与分析
实验过程中,有6名被试由于驾驶模拟引起身体不适、仪器脱落及脑电信号不稳定等原因导致数据无法使用,最终获得40名被试数据. 经K-S检验,数据均符合正态分布(p>0.05). 当数据不符合球形检验结果时,使用“Greenhouse&Geisser”方法进行校正取值. 数据集使用SPSS 26.0软件进行单因素重复测量方差分析研究视线诱导设施对各指标的影响,如表2和图3所示.

表2 各场景下指标均值及显著性分析结果
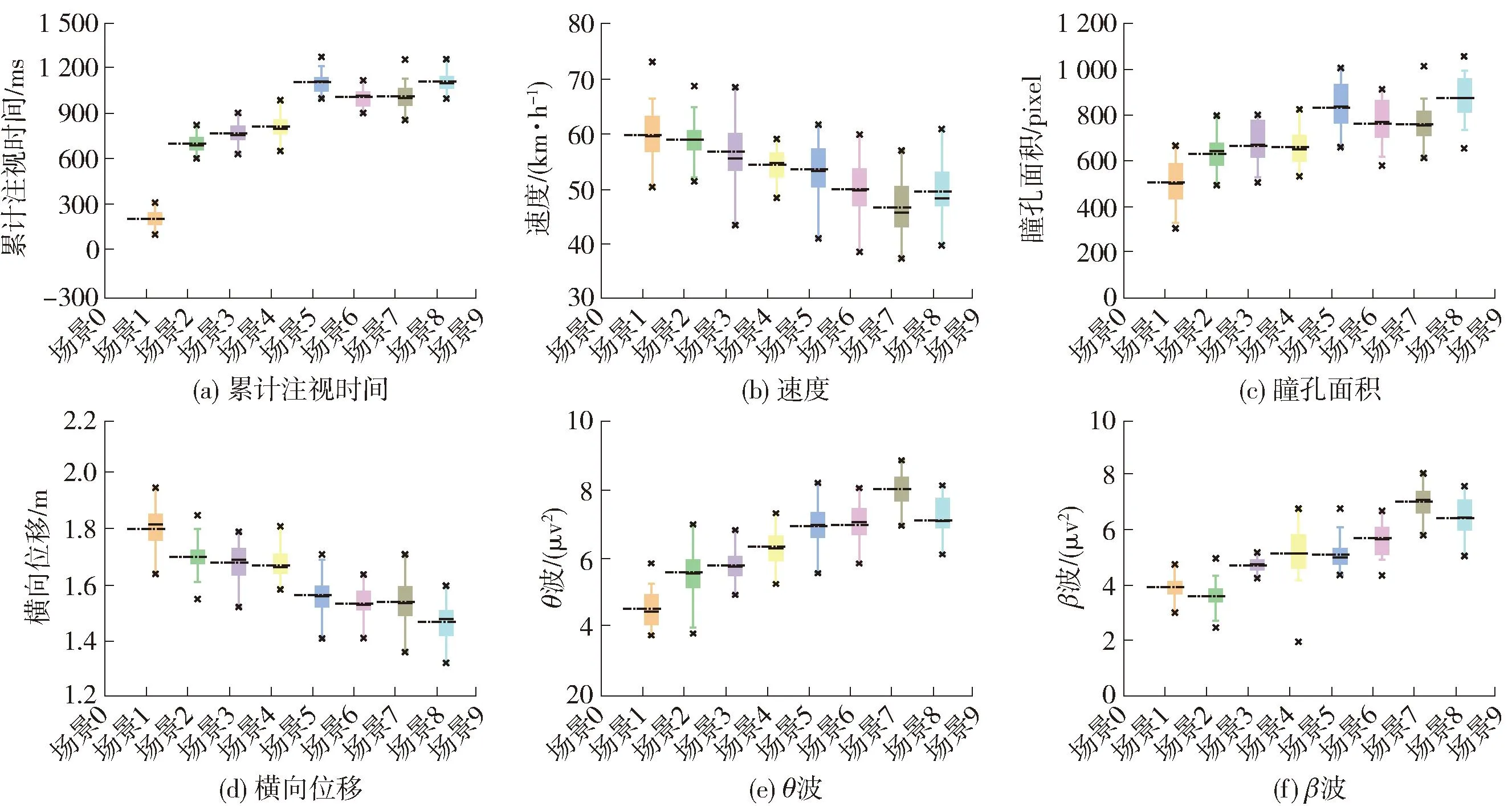
图3 不同场景下各个指标值
3.1 眼动数据
不同视线诱导设施设置方案对累计注视时间(F=904.07;P<0.001)及瞳孔面积(F=50.7;P<0.001)均呈显著影响. 数据表明,与空白组相比设置视线诱导设施后累计注视时间和瞳孔面积呈升高趋势. 累计注视时间较大表明视线诱导设施能引起驾驶人的注意,使驾驶人提前感知路线形的变化;视线诱导设施会引起驾驶人的心理紧张感,对驾驶人产生警醒作用,以致瞳孔面积增大. 单独设置时,场景4(线形诱导标)的累计注视时间与瞳孔面积大于场景2(轮廓标)和场景3(护栏),即相较于护栏和轮廓标,线形诱导标会吸引驾驶人更多的注视点,视觉刺激效果更强,诱导效果更明显. 通过对比场景2~4与场景5~8的眼动数据发现,组合设置较于单独设置的累计注视时间更大,全组合设置大于两两组合设置,表明组合设置能提高驾驶人警觉性以及对视线诱导设施的感兴趣程度. 这与韩磊关于草原公路弯道不同视线诱导设施设置下的驾驶人平均注视时间的研究结果一致[40],其研究结果表明,视线诱导设置为“线形诱导标志+示警桩”的路段相较于单独设置线形诱导标路段的驾驶人平均注视时间更长. 两两组合设置时的瞳孔面积较单独设置时的更大,表明弯道段视线诱导设施的增加会影响驾驶员的心理状态,提高驾驶人的警觉性;全组合设置时的瞳孔面积相较两两设置时的更低,这可能是全组合设置能给驾驶人提供的信息更为充分,使其对视野范围内更远方的道路有心理准备,导致驾驶人的警觉性降低.
3.2 驾驶行为数据
不同设置方案对横向位移(F=123.681;P<0.001)及速度(F=54.729;P<0.001)均呈显著影响. 在平均车速指标方面,与空白组相比,场景2减速效果较场景3、4更差,这表明轮廓标对驾驶人在线形预告以及警示方面的效果较差,这可能是由于轮廓标在夜间以及光线不足等场景下通过逆反射以提示线形,从而达到减速的效果,而本试验场景为晴朗的白天,驾驶人对其关注度可能较小. 在组合设置方面,两两组合设置减速效果优于单独设置,但全组合设置时减速效果低于场景7(线形诱导标+护栏),而全组合的减速效果又优于场景1~6,表明场景7减速效果最优,场景8(线形诱导标+轮廓标+护栏)减速效果方面较场景7有下降趋势. 这可能是由于全组合设置时会增加驾驶人对信息处理的难度和时间,导致注意力分散,降低了其减速效果. 但总体上场景8减速效果优于场景6(护栏+轮廓标)与场景5(线形诱导标+轮廓标),即全组合设置时虽然增加了驾驶人的认知负荷,但认知负荷不是降低驾驶人过弯驾驶绩效的主要原因.
在横向位移指标方面,总的来看,趋势和速度指标一致,空白组的横向位移最大,场景8的横向位移仅略低于场景7,而两两组合设置的横向位移较单独设置更低. 视线诱导设施的存在使得驾驶人提前感知道路线形,产生视觉预警,在通过弯道前车速降低,增强了车辆平稳行驶的保持能力,使得驾驶人靠近右幅车道中心线行驶. 在没有视线诱导设施的情况下,过弯时车速较大,驾驶人的横向控制能力减弱,车辆容易发生偏移. 随着视线诱导设施的增多,预警信息传递更为准确有效,驾驶人对线形把握更加精准,横向位移有降低的趋势.
3.3 脑电数据
不同设置方案对θ波(F=282.361;P<0.001)和β波(F=213.363;P<0.001)均存在显著影响. 由图3可知,设置视线诱导设施会提高β波和θ波绝对功率值;与单独设置相比随着视线诱导设施的增多β波和θ波绝对功率值而变大. 设置视线诱导设施时增加了视觉刺激,驾驶人注意力不断提高,警惕性随之提高,从而诱导驾驶人根据环境刺激做出判断后调整驾驶行为;视线诱导设施的增多时会加剧驾驶员的精神紧张与警觉性,从而导致大脑β波的显著变化;两两组合设置时θ波绝对功率值相较于单独设置更高,表明单独设置时驾驶人压力较大,注意力集中度不高,威胁行车安全. 单独设置时β波绝对功率值低于两两组合设置,视线诱导设施的适当增多引起驾驶员的精神紧张与警觉. 场景8的θ波和β波的绝对功率值又低于场景7,这可能是随着视线诱导设施的增多,驾驶人对弯道段的道路信息获取越充分,情绪波动小,警觉性会有所降低.
以上分析表明,在山区公路弯道设置不同视线诱导设施会对驾驶人的视觉效果、驾驶行为、脑电等方面产生不同的影响. 然而,这些指标数据无法说明其对驾驶人的综合影响效果,因此需要1个综合评价模型量化各个设置方案对驾驶人的综合影响.
4 交安设施综合作用效用评价
4.1 综合效率分析
本实验共获得40名有效被试数据,故将40个DMU在8种场景下的输入和输出指标值汇总,代入超效率BCC-DEA模型,本文通过DEA-SOLVER Pro5.0程序计算得到综合效率值如表3所示.
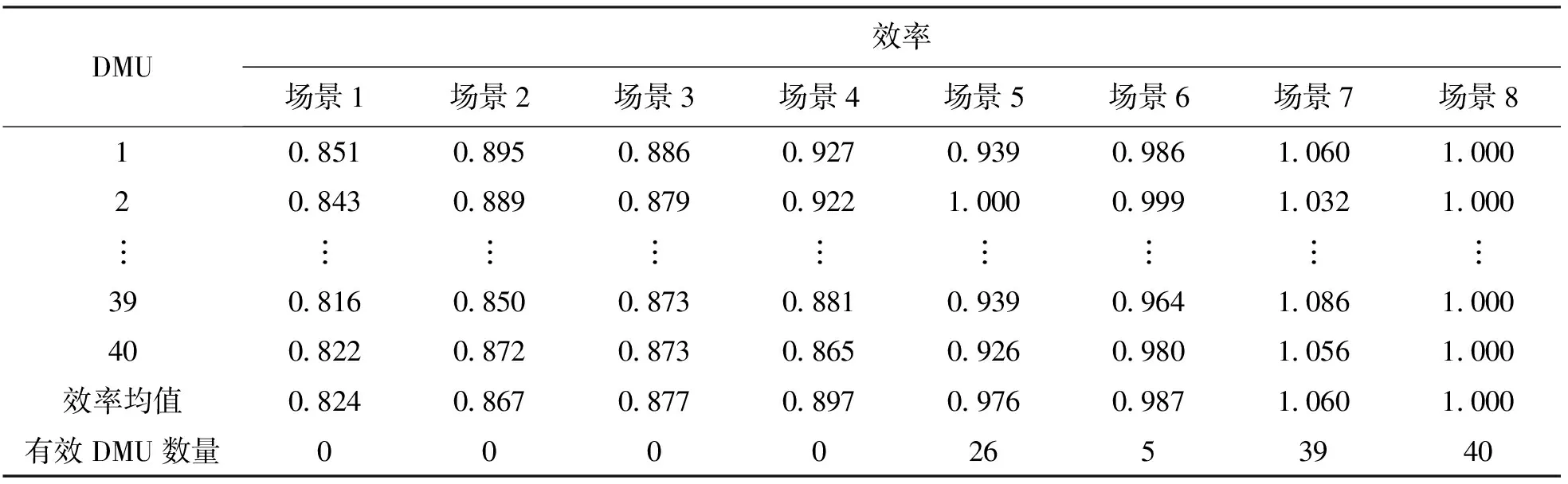
表3 不同场景各DMU效率评价结果
根据模型计算结果,场景1~8效率均值分别为0.824,0.867,0.877,0.897,0.976,0.987,1.060,1.000. 场景1~6效率值低于1,为非DEA有效,而场景7、8≥1,DEA有效,其中场景7的效率值最大,为最有效DMU. 通过各场景的效率均值可看出,与空白组相比,设置视线诱导设施的场景下的总体效率呈增大的趋势;单独设置场景较组合设置的综合效率值均更低;场景8效率值仅低于场景7,但仍然是有效的决策单元.
与空白组相比,设置视线诱导设施的场景会改善驾驶人的驾驶绩效,其中线形诱导标志的效率值最高,但仍然<1,说明单独设置对驾驶绩效改善是有限的;与单独设置相比,两两组合设置的综合效率值均大于单独设置,表明两两组合形式对改善驾驶人的安全、稳定性等方面的效果更优;其中场景7的效率均值最大,说明场景7能充分满足驾驶人的视线诱导需求,使驾驶人及时采取合理的行为反应,提高行车警觉性并保持平稳行驶;场景8的效率均值为1,表明随着视线诱导设施设置种类的增多,增加了视线诱导、警示等效果的同时,驾驶人获得的道路环境信息更为充分,全组合设置可能会使驾驶人的警惕性以及注意力降低,从而导致速度感知以及横向控制等驾驶绩效降低,从而在一定程度上降低视线诱导效果,但整体上该组合设置依旧为DEA有效,说明虽然全组合设置降低了其综合效率值,但对驾驶人视线诱导综合效果影响不大.
4.2 指标投影分析
接着继续运用DEA-SOLVER Pro5.0程序对各个剔除指标集下的综合效率值进行求解,得到剔除后的综合效率值后,通过式(4)计算各场景下被试的综合效率指数Sa(i),汇总得到结果如表4所示.
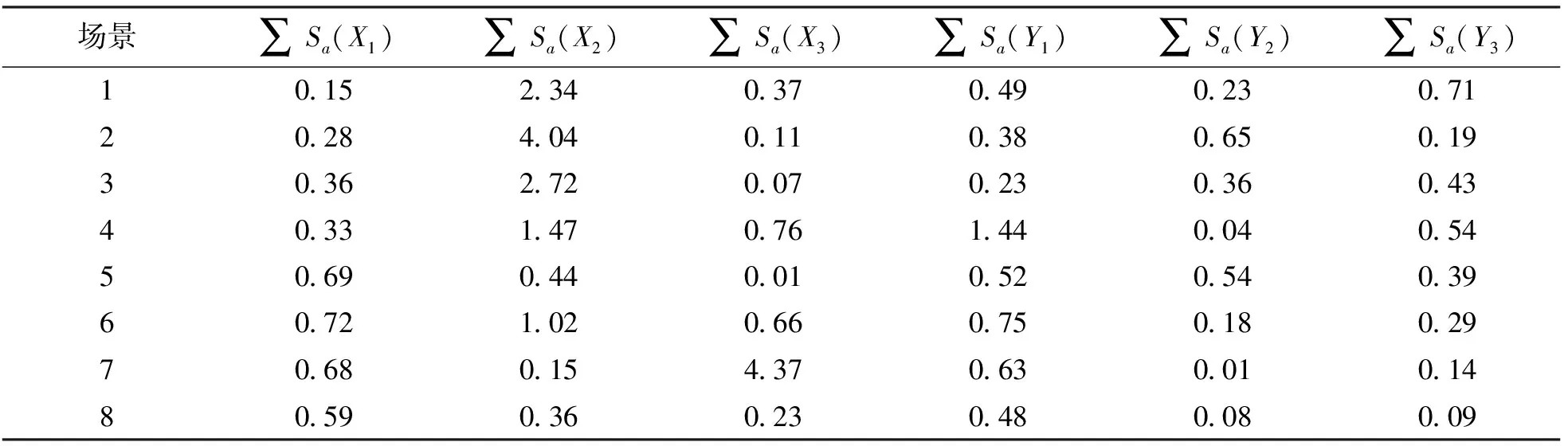
表4 不同指标集之下的综合效率指数和∑Sa(Xi)
从视线诱导设施有效性评价体系的输入输出指标看,当视线诱导设施不设置或单独设置时,指标X2的综合效率指数最大,单独设置时对驾驶人的影响主要体现在速度上,当未设置或者单独设置时,驾驶人容易低估通过弯道的速度,会以较高的车速通过弯道,即车速是影响驾驶人安全过弯的关键因素;组合设置时,X2综合效率值呈现下降趋势,即视线诱导效果有所改善,驾驶人充分得到线形信息后在通过弯道时减速效果较为明显.组合设置时X3的综合效率指数最大,其次是Y2,这表明组合设置时影响驾驶绩效的关键因素在于横向位移,其次是瞳孔面积;组合设置时视线诱导设施的增多导致对驾驶人的视觉刺激变大,增加了驾驶人通过弯道时的紧张感与警觉性,有效提升了横向控制能力,车辆横向位移减小.
4.3 山区公路弯道视线诱导设施设置建议
驾驶人通过山区公路弯道时会对弯道状态进行感知、判断、决策,然而山区弯道不良的行车环境会影响驾驶人的视距、视区,以致方向、距离以及速度的误断,从而进一步影响驾驶人对于速度控制、横向控制能力等驾驶任务的操作与执行. 因此,从人因与驾驶任务出发的山区公路弯道的行车环境的改善应着重于视线诱导设施的合理设置,使驾驶人对前方行车环境判断正确,保证在可视范围内得到良好的诱导,安全有效地引导驾驶人通过弯道. 对于视线诱导设施设置而言,不同种类以及不同组合设置的视线诱导设施对驾驶人过弯时的感知、判断、决策不同. 设置过少会导致诱导信息不足,使驾驶人对行车道边界模糊,弯道线形轮廓视认不清,驾驶人易因视线不良、车速较快、操作不当等问题导致交通安全事故;设置过多会给予驾驶人较强的视觉冲击,此时驾驶人安全通过弯道时的信心可能就越大,降低了警觉意识,分散了驾驶人的注意力,往往采取较高的车速通过弯道,对行车安全不利. 根据指标敏感性分析结果,应该从改善驾驶人对车速感知与控制和横向控制的角度,提高决策单元的有效性.
根据模型计算结果,在晴朗的白天,线形诱导标志的效率均值为0.897大于轮廓标(0.867)与护栏(0.877)的效率均值,即在单独设置时,线形诱导标志的效果相对更优;组合设置中的效率均值从大到小排序依次为“线形诱导标志+护栏”(1.060)、“线形诱导标志+轮廓标”(0.987)、“轮廓标+护栏”(0.976)及“线形诱导标志+护栏+轮廓标”(1.000). 综上分析,本文基于驾驶模拟实验,构建基于超效率BCC-DEA的山区公路视线诱导设施有效性评价体系,利用驾驶人的眼动、脑电以及驾驶行为指标综合分析评价,建议山区公路弯道视线诱导设施设置方案为“线形诱导标志+护栏”.
5 结论
1)单独设置时,线形诱导标志的效率均值大于轮廓标与护栏,即线形诱导标志较其他2种视线诱导设施在晴朗的白天效果更优.
2)两两组合的线形诱导效果优于单独设置. 其中“线形诱导标志+护栏”组合的行车环境最佳,使得驾驶人保持良好的驾驶绩效通过弯道. 因此从驾驶人角度出发,建议山区公路弯道视线诱导设置方案为“线形诱导标志+护栏”.
3)当视线诱导设施设置数量超过2个时,一定程度上会降低警示与诱导效果,但全组合设置仍属于有效决策单元,视线诱导设施增多带来的认知负荷增大不是导致效率值下降的主要原因;根据指标敏感性分析,车速感知控制与横向控制能力为影响DMU效率的关键因素.
4)本文仅针对晴朗的白天进行模拟实验,尚未考虑其他实验环境条件,如黑夜、雨雾、雪天等场景;此外,本文仅考虑部分常见的视线诱导设施进行组合,在今后的研究中可考虑如标线等其他交通安全设施进一步探讨更多的设置形式对山区公路弯道安全性的影响;同时,本文的被试人员均为在校学生,后续的研究中可进一步针对驾驶人年龄、职业等变量进行扩充被试范围,进行更深入的研究.
致谢:感谢福建省科学技术协会、福建省公路学会、福建省交通安全研究国际联合实验室以及福州大学土木工程学院对本研究的支持.
