考虑电动汽车的时滞孤岛微电网负荷频率控制
2024-03-26李新宇张彬彬周程涛
伍 怀,李新宇,张彬彬,周程涛
考虑电动汽车的时滞孤岛微电网负荷频率控制
伍 怀,李新宇,张彬彬,周程涛
(湖南工业大学 电气与信息工程学院,湖南 株洲,412007)
本文研究了考虑电动汽车参与调频的时滞孤岛微电网,重点研究了通讯时滞对孤岛微电网系统的影响,构建了考虑电动汽车的时滞孤岛微电网模型,采用了适用的Lyaunov-Krasovskii泛函(LKF),并通过运用自由权矩阵积分不等式得到了稳定性判据,通过不同的参数设定,进行了仿真实验,结果说明了本文方法的有效性。
孤岛微电网;负荷频率控制;时滞系统;电动汽车
0 引言
孤岛微电网(Island microgrid,IMG)是通过可再生能源、储能技术和智能控制系统等手段实现能源的自给自足和可持续发展的电力系统[1~2]。
孤岛微电网的负荷波动性通常比较大使得负荷频率控制(Load frequency control,LFC)更加困难。
在孤岛微电网中,由于通信和控制的延迟,可能会导致负荷频率控制的不准确性。因此,需要将该系统视作一个时滞系统(Time-delay system)[3],研究者们致力于发展适用于不同类型时滞系统的稳定性判据和分析方法。这方面的研究包括利用数学工具如Lyapunov稳定性理论、线性矩阵不等式等来研究时滞系统的稳定性[4~6]。
综合以上分析,本文选取电动汽车(Electric Vehicle, EV)作为必要时参与调频的储能模块。然后提出一个新的孤岛微电网LFC模型,采用了一个合适的Lyapunov Krasovskii Functional,得到稳定性判据,最后通过仿真,证明了本文方法的有效性。
1 时滞孤岛微电网系统模型

下文当中的“-1”跟“T”分别代表矩阵的逆跟转置,并且{X}=X+XT。

图1 系统简化模型
图2为本文所研究孤岛微电网系统框图。表1为系统控制参数。
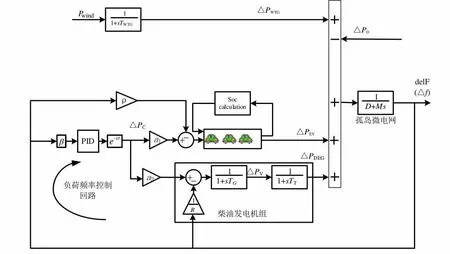
图2 本文孤岛微电网 LFC 系统模型

表1 孤岛微电网LFC系统的控制参数
其中状态变量和输出变量定义如下:



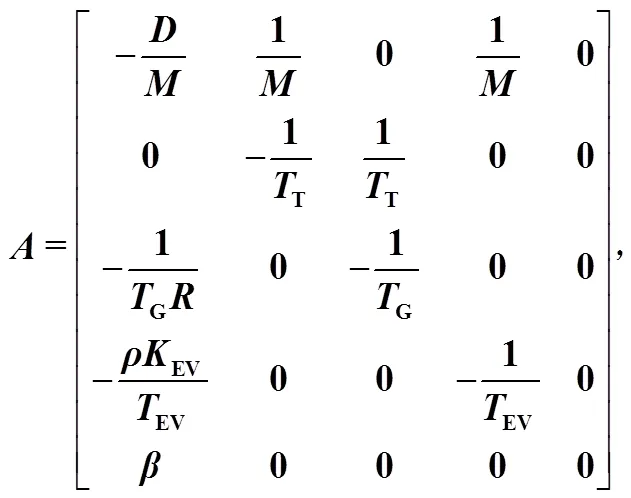
图2所示动力学模型可描述为:

表达式中符号含义已由表1和上文给出,根据以上模型然后可以获得系统的数学模型如下:




PID控制器为:

其中:PID分别为控制器的比例、积分、微分增益。
2 时滞相关稳定性判据
这一节,我们给出了系统的时滞相关鲁棒稳定性条件。首先,为得到稳定性条件,需要用到以下引理。

其中,



有以下不等式成立:

其中,

接下来的定理给出了系统的稳定性条件,为了使得表述简洁明了,特定义向量和矩阵如下:





其中:






选择如下适合系统的LKF进行证明:



对()求导可得:

根据引理2,可以得到

3 仿真分析
本文的微电网为传统微电网,系统参数参考文献[2]。

表2 系统参数

表3 本文定理1求得系统MDSM(μ=0)
本文通过MATLAB-Simulink根据图2的结构搭建仿真模型,通过设定不同的控制器参数,求得不同的时滞上界(MDSM)由表3给出,选取控制器参数P=0.6,I=0.4进行分析,由图3可看出,当时滞为8.60 s时,波形图是收敛的,但上升为8.64 s,波形图就发散了,说明真实的实质上界在8.60~8.64 s之间,而本文所计算的结果为8.63 s(表3加粗),说明本文方法求得的时滞上界接近真实值。

图3 不同定常时滞下系统频率响应
4 结论
本文构造适合系统的LKF,得到新的时滞相关稳定性判据。最后,通过不同的参数设定仿真实验,结果表明了本文方法的有效性。
[1] 酉子辰. 张继红. 孤岛微电网中的风光储建模仿真研究[J]. 电子技术, 2022, 51(9): 18-21.
[2] 周沙鋆. 计及电动汽车并网的负荷频率控制系统时滞相关稳定性分析[D]. 株洲: 湖南工业大学, 2021.
[3] 沈力, 肖会芹. 含扰动参数时滞电力系统鲁棒稳定性分析[J]. 电测与仪表, 2019, 56(14): 62-67.
[4] Zeng H B, He Y, Teo K L. Monotone-delay-interval-based Lyapunov functionals for stability analysis of systems with a periodically varying delay[J]. Automatica, 2022, 138: 110030.
[5] Zeng H B, Park J H, Shen H. Robust passivity analysis of neural networks with discrete and distributed delays[J]. Neurocomputing, 2015, 149, Part B: 1092-1097.
[6] Zeng H B, He Y, Wu M, et al. Free-Matrix-Based integral inequality for stability analysis of systems with Time-Varying delay[J]. IEEE Trans Automat Contr, 2015, 60(10): 2768-2772.
Load frequency control of delayed islanded microgrids considering electric vehicle grid connection
Wu Huai, Li Xinyu, Zhang Binbin, Zhou Chengtao
(College of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, Hunan Province, China)
TM712
A
1003-4862(2024)03-0015-04
2023-10-24
湖南省自然科学基金(2021JJ50047)
伍怀(1996-),男,在读硕士生,研究方向:鲁棒控制。E-mail:2594160863@qq.com