运用国产单孔机器人手术系统完成腹膜后入路单孔肾上腺切除术的初步经验(附视频)
2024-03-24魏勇沈露明沈百欣胡海斌刘威杨健蒋荣江朱清毅
魏勇 沈露明 沈百欣 胡海斌 刘威 杨健 蒋荣江 朱清毅

收稿日期:2022-07-12 錄用日期:2023-08-22
Received Date: 2022-07-12 Accepted Date: 2023-08-22
基金项目:江苏省卫生健康委科研项目(ZD2021028)
Foundation Item: Scientific Research Project of Jiangsu Provincial Health Commission (ZD2021028)
通讯作者:朱清毅,Email:drzhuqingy@126.com
Corresponding Author: ZHU Qingyi, Email: drzhuqingy@126.com
引用格式:魏勇,沈露明,沈百欣,等. 运用国产单孔机器人手术系统完成腹膜后入路单孔肾上腺切除术的初步经验(附视频)[J].机器人外科学杂志(中英文),2024,5(1):13-19.
Citation: WEI Y, SHEN L M, SHEN B X, et al. Primary experience of a domestic single-port robotic surgical system in retroperitoneal adrenalectomy (with video) [J]. Chinese Journal of Robotic Surgery, 2024, 5(1): 13-19.
摘 要 目的:探讨运用国产“术锐”单孔蛇形臂机器人手术系统完成腹膜后入路单孔肾上腺切除术的初步经验。方法:南京医科大学第二附属医院泌尿外科于2021年11月—2021年12月收治的4例肾上腺肿瘤患者,运用国产“术锐”单孔蛇形臂机器人手术系统完成单孔肾上腺切除术,手术均采用经腹膜后入路,记录肿瘤大小、手术时间、术中出血量等信息,并对围手术期资料、手术并发症及术后恢复情况进行分析。结果:4例患者中男女各2例,年龄40~68岁,平均年龄54岁,平均BMI值为26.2(24.8~29.8)kg/m2;肿瘤最大直径1.2~3.3 cm,其中左侧1例,右侧3例;4例手术均采用纯单孔方式,术中均未增加辅助通道,手术总时间104~200 min,机器人操作时间50~96 min,
术中出血量10~50 ml。术后病理诊断为肾上腺皮质腺瘤3例,右血管内乳头状内皮细胞增生(Masson瘤)1例。术后均未出现出血、发热、切口感染等并发症。结论:运用“术锐”单孔蛇形臂机器人手术系统可安全、有效地完成腹膜后入路单孔肾上腺切除术,蛇形臂具有动作灵活、指向性准确等优势,可保障手术的顺利实施。
关键词 单孔机器人手术系统;腹膜后入路;肾上腺切除术
中图分类号 R608 R692 文献标识码 A 文章编号 2096-7721(2024)01-0013-07
Primary experience of a domestic single-port robotic surgical system in retroperitoneal adrenalectomy (with video)
WEI Yong, SHEN Luming, SHEN Baixin, HU Haibin, LIU Wei, YANG Jian, JIANG Rongjiang, ZHU Qingyi
(Department of Urology, the Second Affiliated Hospital of Nanjing Medical University, Nanjing 210011, China)
Abstract Objective: To explore the surgical experience of domestic single-port robotic surgical system (Single-port surgical robot with sneak-like arms, Beijing Surgerii Robotics Co., Ltd) in retroperitoneal adrenalectomy. Methods: 4 patients who were scheduled for adrenalectomy due to adrenal neoplasm in the Department of Urology of the Second Affiliated Hospital of Nanjing Medical University from Nov. 2021 to Dec. 2021 were selected as the research objects. Domestic single-port robotic surgical system was used to perform single-port adrenalectomy on the 4 patients with retroperitoneal approach. Clinical data on tumor size, operative time, intraoperative blood loss was recorded, and perioperative data, surgical complications and postoperative recovery were analyzed. Results: 4 patients (2 male and 2 female) with a mean age of 54 years (40 to 68 years) and a mean BMI of 26.2 (24.8 to 29.8) kg/m2. The tumors ranged from 1.2 to 3.3 cm in maximum diameter, including 1 case of left side and 3 cases of right side. The 4 cases of surgeries were all performed under single-port without extra auxiliary channels, and the total operative time ranged from 104 to 200 min, while the robotic operative time ranged from 50 to 96 min, with the intraoperative blood loss of 10 to 50 ml. Adrenocortical adenoma was confirmed in 3 patients and papillary endothelial cell hyperplasia (Massons tumor) within the right vessel in 1 patient by postoperative pathological diagnosis. There were no complications such as bleeding, fever, and incision infection found in the postoperative period. Conclusion: With the advantages of flexible movement and accurate operation of serpentine arms, retroperitoneal adrenalectomy could be safely and effectively performed with the domestic single-port robotic surgical system.
Key words Single-port Robotic Surgical System; Retroperitoneal Approach; Adrenalectomy
外科手术治疗肾上腺疾病已有上百年历史,其术式和手术入路也在不断的创新与发展中[1]。1992年,Ganger M等人[2]报道了首例腹腔镜肾上腺切除术(Laparoscopic Adrenalectomy,LA),相较于开放手术,LA可明显减少术中出血量、减轻术后疼痛、缩短术后住院天数[3]。目前LA已成为多数肾上腺肿瘤的标准术式之一[4]。近年来,随着机器人手术系统的发展与普及,机器人辅助腹腔镜肾上腺切除术(Robot-assisted Laparoscopic Adrenalectomy,RALA)亦逐步运用于临床。2017年王林辉等人[5]完成了国内首例机器人单孔肾上腺肿瘤切除术,初步经验表明该术式安全可行,术后患者疼痛轻,恢复快,切口小,短期疗效确切。为更好地完成单孔手术,达芬奇单孔机器人手术系统(SP系统)于2018年
应运而生,该系统将3个器械和内窥镜整合到1个机械臂内,操作器械和观察镜均可进行腕式活动[6]。另外,诸多国内单孔机器人研发团队如“北京术锐”“深圳精锋”“上海微创”等自主研发的单孔机器人也相继面世。2021年11月—2021年12月南京醫科大学第二附属医院泌尿外科采用国产“术锐”单孔蛇形臂机器人手术系统完成4例经腹膜后入路单孔肾上腺切除术,疗效满意,现报道如下。
1 资料与方法
1.1 临床资料 南京医科大学第二附属医院泌尿外科2021年11月—2021年12月收治的因肾上腺肿瘤拟行肾上腺切除术的4例患者,其中男女各2例,年龄40~68岁,平均年龄54岁,平均BMI值为26.2(24.8~29.8)kg/m2,肿瘤最大直径1.2~3.3 cm,其中左侧1例,右侧3例。
1.2 入选标准 纳入标准:①年龄≥18周岁;②肾上腺肿瘤直径≤7 cm;③身体质量指数
(Body Mass Index,BMI)为18.5~30.0 kg/m2;
④美国麻醉医师协会(ASA)评分Ⅰ~Ⅲ级;⑤能配合完成访视及相关检查;⑥受试者自愿参加该临床试验,并签署知情同意书。
排除标准:①存在(或既往有)其他恶性肿瘤且研究者认为不适合纳入者;②既往接受过同类型泌尿系统外科手术治疗且研究者评估后认为不适合纳入者;③入组前3个月内及计划在治疗期间行其他大型手术者;④存在活动性肺结核者;⑤有严重全身性疾病者;⑥入组前3个月内参与过其他干预性临床试验者。
本研究由南京医科大学第二附属医院伦理委员会批准实施([2021]-QX-008-LP-01)。
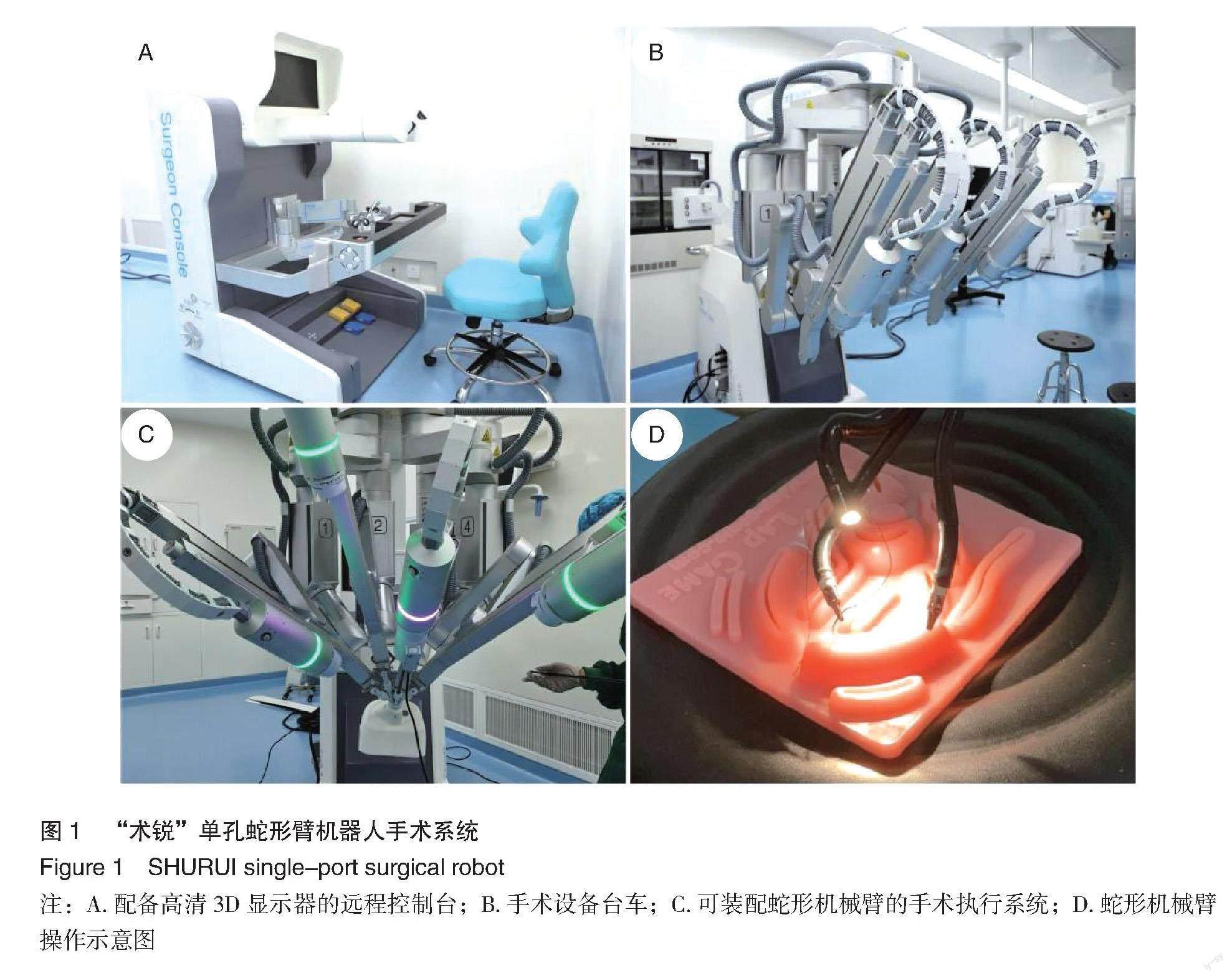
1.3 手术系统 采用“术锐”单孔蛇形臂机器人手术系统行腹膜后入路单孔机器人肾上腺切除术,该系统由远程控制台、手术设备台车、可装配4个蛇形机械臂的手术执行系统及蛇形机械臂组成(如图1)。其中蛇形机械臂具有两段,且均可四向弯转,该机械臂直径8 mm,末端携带单极剪刀、双极抓钳、持针器等手术器械。各机械臂展开后可呈现良好的三角操作关系,避免了单孔手术操作中的“筷子效应”和“反向操作”等问题。
1.4 手术方法 术前留置导尿管,患者全麻成功后取完全健侧卧位,升高腰桥呈“折刀位”,稳妥固定于手术台。调节手术床使患者处于头高脚低侧卧位(头部抬高30°左右)。采用经腹膜后入路,于腋中线与第12肋交界处下方约
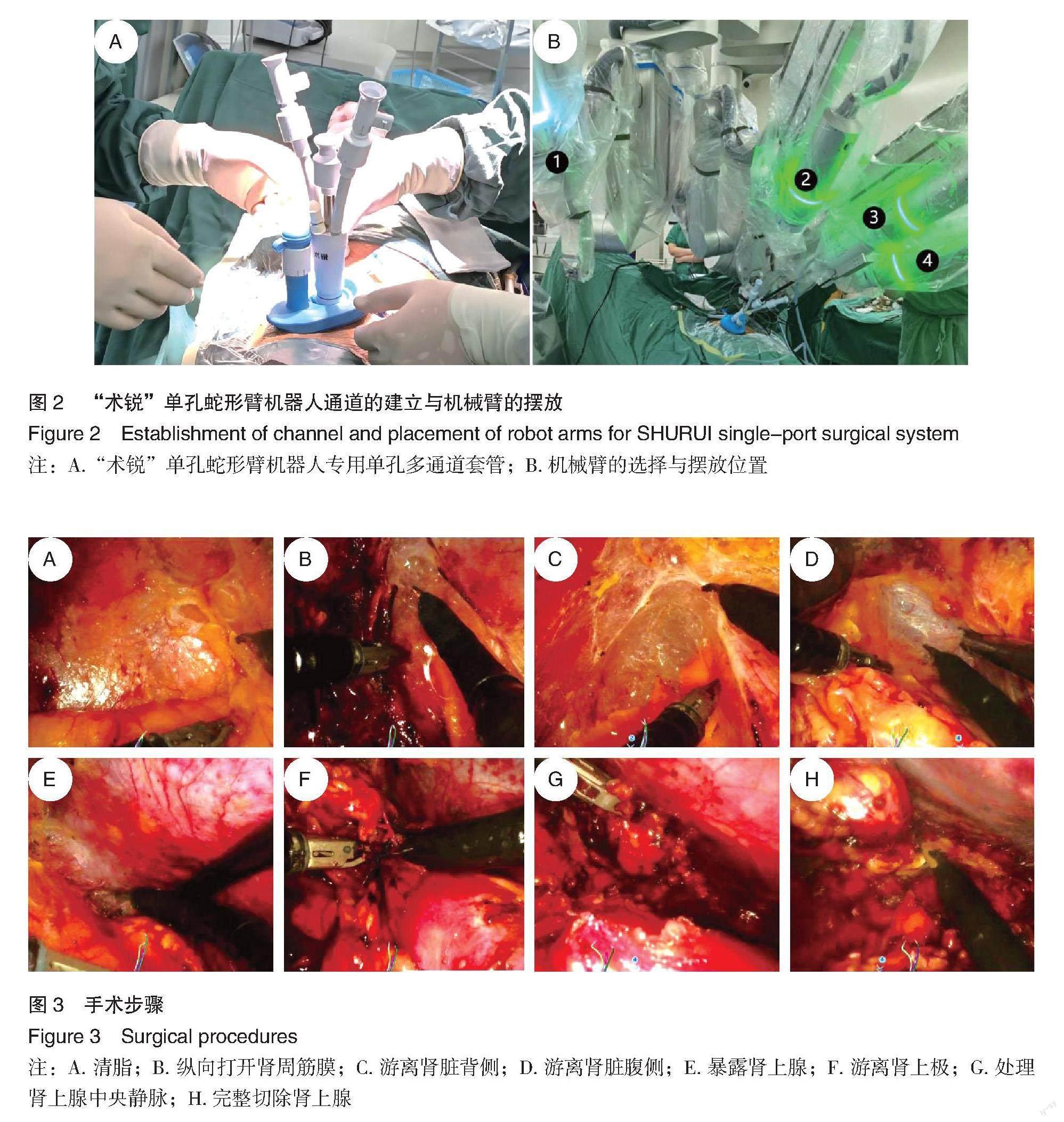
1 cm做3~4 cm横行皮肤切口,到肌肉层时顺肌纤维方向切口至腹膜后间隙,尽量避免离断肌纤维,然后通过自制气囊充气600 ml以扩张腹膜后间隙,随后置入单孔机器人专用多通道套管,连接单孔机器人系统,将蛇形机械臂通过专用单孔多通道套管置入体内(如图2A)。为避免术中助手的干扰,常规使用3个操作臂,一般3号臂使用蛇形可弯镜头臂、2号臂使用双极抓钳蛇形机械臂、4号臂使用单极剪刀蛇形机械臂(如图2B),同时助手可通过多通道套管的辅助孔置入普通腹腔镜器械进行
辅助。
首先由上而下整块清除腹膜后脂肪并翻转至髂窝,显露肾周筋膜、腹膜反折和腰肌等解剖标志(如图3A);纵向打开肾周筋膜(如图3B),沿腰大肌平面向上游离至膈下,向下游离至肾脏下极水平(如图3C);从肾脏内上方的肾周脂肪囊与前层肾周筋膜之间向内侧深面游离(如图3D),此间隙为无血管间隙,游离至肾上腺或肿瘤表面(如图3E);然后从肾脏外上方的肾周脂肪囊与后层肾周筋膜之间的相对无血管间隙向内侧游离至肾上极,去除肾上极部分脂肪,完整显露肾上极实质(如图3F);沿肾上极实质游离肾上腺的底部,仔细解剖肾上腺中央静脉,并使用Hem-o-Lok将其夹闭后离断(如图3G);肾上腺内侧下方常有多支肾上腺动脉,仔细游离并使用Hem-o-Lok将其夹闭后离断,沿肾上腺表面仔细游离并完整切除肾上腺(如图3H)。检查术野出血情况,标本放入取物袋取出,留置引流管,逐层关闭切口(如图4)。记录手术时间、机器人操作时间、术中出血量、切口数量、切口大小、围术期并发症、病理检查结果等。
2 结果
4例患者BMI值分别为24.8 kg/m2、28.7 kg/m2、
29.8 kg/m2、21.5 kg/m2,平均BMI值为26.2 kg/m2;
肿瘤直径分别为2.2 cm、1.2 cm、3.3 cm、2.3 cm,
其中左侧1例,右侧3例;3例有高血压病史。
4例手术均采用经腹膜后入路,均采用纯单孔方式,术中均未增加辅助通道,手术顺利完成,手术总时间分别为196 min、200 min、112 min、104 min,平均手术时间为153 min;机器人操作时间分别为60 min、96 min、64 min、50 min,平均机器人操作时间为67.5 min;术中出血量分别为10 ml、50 ml、10 ml、30 ml,平均出血量25 ml;切口长度分别为3 cm、4 cm、4.5 cm、
4 cm,切口平均长度3.88 cm。术后均未出现出血、发热、切口感染等并发症,术后住院天数分别为6 d、13 d、19 d、11 d,术后平均住院天数为12.25 d。术后病理诊断为肾上腺皮质腺瘤3例,右血管内乳头状内皮细胞增生(Masson瘤)1例。
3 讨论
机器人手术系统具有手术视野更清晰、操作角度更灵活、暴露解剖更精细等优势,其在临床中的应用越来越广泛。2001年,Horgan S等人[7]首次报道了RALA的开展情况,目前RALA已成为LA的重要替代术式。相较于传统腹腔镜手术,单孔腹腔镜手术(Laparoendoscopic Single-site Surgery,LESS)的优势在于切口数量减少,体表创伤更小、切口更美观、术后恢复更快、疼痛感更轻,并且可以降低术后并发症(如腹部粘连和切口疝气)的发生率[8]。但由于LESS缺少手术操作的“三角”关系,术中常需要使用特殊器械,并且需要娴熟的腹腔镜技巧,由于操作空间有限,镜头和其他器械之间容易发生“碰撞、干扰”,从而增加手术时间和难度。机器人辅助单孔腹腔镜手术(R-LESS)的临床运用有效地解决了LESS所存在的诸多临床操作问题,特别是在处理复杂肾上腺肿瘤时,机器人手术系统凭借其3D高清术野、灵活的机械臂及精细的解剖等特点,优势更加突出[9]。在国内,王林辉团队首次报道了2例达芬奇单孔机器人辅助單孔腹腔镜肾上腺肿瘤切除术。然而,在传统机器人手术系统辅助下行LESS的操作灵活度相对欠佳,手术操作范围较小,且辅助设备尚不完善,因此在临床上尚未广泛开展[10]。
美国Intuitive Surgical公司于2018年设计了专用的达芬奇单孔机器人手术系统(SP系统),将观察镜和3把操作器械融合到一个机械臂内,操作器械和观察镜均可进行腕式活动,器械间无需交叉操作。这种机器人与LESS相结合的创新,对泌尿外科单孔手术起到了巨大推动作用[9]。2019年,Kaouk J等人[11]首先报道了9例泌尿外科SP系统辅助下单孔机器人手术,初步证明了SP系统的可行性和有效性。但达芬奇SP系统在国内仍处于临床试验阶段,尚未普及,这直接影响了国内单孔机器人手术的发展。国产“术锐”单孔蛇形臂机器人手术系统的临床应用有效地解决了这一困境[12]。“术锐”机器人手术系统中的蛇形机械臂可在人体内灵活弯曲,其双连续体结构增强了蛇形臂的强度,从而确保了单孔手术的有效性。王林辉教授团队率先报道了采用“术锐”单孔蛇形臂机器人手术系统完成4例零缺血肾部分切除术,初步验证了该系统的安全性和有效性[13]。
此外,手术入路与切口的选择对手术的顺利完成也是至关重要的。经腹膜后入路单孔机器人手术的相关报道较少,但其在泌尿系统肿瘤治疗方面具有重要的价值。单孔机器人手术系统具有更清晰的3D高清视野、更为精细的解剖操作及更为灵活的活动角度,为肾上腺切除手术提供了更好的技术平台[14]。“术锐”单孔机器人手术系统的机械臂在进入后腹腔后展开的平面为三角形,有效地避免了传统单孔机器人手术中因各操作器械相对平行而导致的操作困难。此外,相较于达芬奇SP系统的12 cm空间要求[15],“术锐”单孔机器人手术系统的机械臂在人体内仅需要7 cm的展开空间,能够覆盖更大的手术区域,更加适合经腹膜后入路完成手术。因此,本团队为4例患者制定了经腹膜后入路单孔机器人肾上腺切除手术,手术切口选择在腋中线与第12肋交界处下方约1 cm做横行切口,手术均顺利完成。2021年12月,Lee I A等人[16]首次报道了运用达芬奇SP系统完成8例经腹膜后入路单孔机器人肾上腺切除术,但是8例手术过程中均增加了辅助通道。而本研究中的4例患者采用纯单孔术式,均未增加辅助通道,这是“术锐”单孔机器人手术系统完成经腹膜后入路单孔机器人手术的一大亮点。
4例手术中,机器人操作时间分别为60 min、
96 min、64 min、50 min,值得注意的是3例右侧肾上腺切除术中机器人操作时间分别为
60 min、64 min、50 min,而左侧1例的机器人操作时间为96 min,左右两侧的操作时间存在显著差异。由于左、右侧肾上腺解剖差异较大,左侧肾上腺比右侧低,经腹膜后入路越过肾上极游离左侧肾上腺时角度更刁钻,暴露较困难,空间更狭小,因此可认为经腹膜后入路单孔机器人右侧肾上腺切除较左侧更易完成[17]。4例患者对应的出血量分别为10 ml、50 ml、10 ml、
30 ml,左侧肾上腺切除患者出血量最多,这主要与左侧肾上腺解剖难度大相关。另外4例患者对应的BMI值分别为24.8 kg/m2、28.7 kg/m2、29.8 kg/m2、21.5 kg/m2,BMI最大值患者对应的机器人操作时间为64 min,低于平均机器人操作手术时间,由此可见肥胖未明显增加手术难度。术后标本病理诊断为肾上腺皮质腺瘤3例,右血管内乳头状内皮细胞增生(Masson瘤)1例。Masson瘤又称为血管内乳头状内皮增生(Intravascular Papillary Endothelial Hyperplasia,IPEH),是一种罕见的良性血管病变,好发于口腔、头、颈部、四肢,其特征在于内皮细胞的反应性增殖[18]。肾上腺IPEH很罕见,经文献检索发现,到目前为止仅报道了7例发生在肾上腺的IPEH,主要治疗方法是外科切除肿瘤[19]。
基于此4例手术,本研究总结了应用“术锐”单孔机器人系统行经腹膜后入路肾上腺切除术的初步经验:①腹膜后空间较为狭小,蛇形机械臂应避免过度弯曲,以免阻力过大影响操作精准性,同时可以避免副损伤。②助手在未增加辅助通道的情况下进行辅助时尽量以前后进出的方式来调整位置,需避免大幅度上下左右摇摆,以减少与机械臂碰撞干扰甚至发生缠绕。③机器人通道建立于腰大肌与第12肋缘交界处下方约1 cm水平,不宜下移甚至靠近髂前上棘,这样可以为游离肾上腺提供更好的操作角度。④“术锐”单孔机器人蛇形臂最佳操作距离为10~15 cm,若术中操作位置过近,则缺乏机械臂展开所需的腹膜后空间;若操作位置过远则会影响操作精准度,此时可将操作臂整体向体内移动至合适距离。⑤手术过程中如出现辅助困难,特别是完成左侧肾上腺切除术时,可选择增加辅助通道,以提高手术安全性。
综述所示,本研究结果初步显示运用“术锐”单孔蛇形臂机器人手术系统完成腹膜后入路单孔机器人肾上腺切除术安全、有效,手术效果令人满意。
利益冲突声明:本文不存在任何利益冲突。
作者贡献声明:①魏勇负责设计论文框架,
起草论文;②沈露明、沈百欣、胡海斌、刘威、杨健、蒋荣江都参与该项目具体操作及研究过程的实施;③魏勇、沈露明、刘威负责数据收集,统计学分析、绘制图表;④魏勇負责论文修改;⑤朱清毅负责拟定写作思路,指导撰写文章并最后定稿。
参考文献
[1] Gavriilidis P, Camenzuli C, Paspala A, et al. Posterior retroperitoneoscopic versus laparoscopic transperitoneal adrenalectomy: a systematic review by an updated meta-analysis[J]. World J Surg, 2021, 45(1): 168-179.
[2] Gagner M, Lacroix A, Bolté E. Laparoscopic adrenalectomy in Cushings syndrome and pheochromocytoma[J]. N Engl J Med, 1992, 327(14): 1033.
[3] Raffaelli M, De Crea C, Bellantone R. Laparoscopic adrenalectomy[J]. Gland Surg, 2019, 8(Suppl 1): S41-S52.
[4] Kook Y, Choi H R, Kang S W, et al. Laparoscopic adrenalectomy: comparison of outcomes between posterior retroperitoneoscopic and transperitoneal adrenalectomy with 10 years experience[J]. Gland Surg, 2021, 10(7): 2104-2112.
[5] 吴震杰, 王坚超, 王杰, 等.机器人单孔腹腔镜肾上腺肿瘤切除术初步临床应用报告[J].临床泌尿外科杂志, 2017, 32(6): 437-439, 443.
[6] Garbens A, Morgan T, Cadeddu J A. Single port robotic surgery in urology[J]. Curr Urol Rep, 2021, 22(4): 22.
[7] Horgan S, Vanuno D. Robots in laparoscopic surgery[J]. J Laparoendosc Adv Surg Tech A, 2001, 11(6):
415-419.
[8] 王林辉, 吴震杰, 朱清毅.中国泌尿外科单孔腹腔镜技术的发展与展望[J].中华泌尿外科杂志, 2020, 41(11): 807-810.
[9] Barret E, Sanchez-Salas R, Ercolani M, et al. Robotic-assisted laparoendoscopic single-site surgery (R-LESS) in urology: an evidence-based analysis[J]. Minerva Urol Nefrol, 2011, 63(2): 115-122.
[10] Janetschek G. Robotics: will they give a new kick to single-site surgery? [J].Eur Urol, 2014, 66(6):
1044-1045.
[11] Kaouk J, Garisto J, Bertolo R. Robotic urologic surgical interventions performed with the single port dedicated platform: first clinical investigation[J].Eur Urol, 2019, 75 (4): 684-691.
[12] 我国成功研发单孔手术机器人[J].微创医学, 2021, 16(2): 235.
[13] 张超, 王正, 张宗勤, 等.国产单孔蛇形臂机器人手术系统在零缺血肾部分切除术中的初步应用[J].中华泌尿外科杂志, 2022, 43(2): 132-137.
[14] Economopoulos K P, Mylonas K S, Stamou A A, et al.
Laparoscopic versus robotic adrenalectomy: a comprehensive meta-analysis[J]. Int J Surg, 2017. DOI: 10.1016/j.ijsu.2016.12.118.
[15] Dobbs R W, Halgrimson W R, Talamini S, et al. Single-port robotic surgery: the next generation of minimally invasive urology[J]. World J Urol, 2020, 38(4): 897-905.
[16] Lee I A, Kim J K, Kim K, et al. Robotic adrenalectomy using the da Vinci SP robotic system: technical feasibility comparison with single-port access using the da Vinci multi-arm robotic system[J]. Ann Surg Oncol, 2022, 29(5): 3085-3092.
[17] Marek-Safiejko M, Safiejko K, ?ukaszewicz J, et al.
A comparison of two approaches to laparoscopic adrenalectomy: lateral transperitoneal versus posterior retroperitoneal approach[J]. Adv Clin Exp Med, 2016, 25(5): 829-835.
[18] Tutar O, Samanci C, Bakan S, et al. Typical MDCT angiography findings of an unusual cutaneous neoplasia; Masson tumor[J]. Pol J Radiol, 2015. DOI: 10.12659/PJR.892043.
[19] Holmes C, Akhras A, Schneider A, et al. Adrenal intravascular papillary endothelial hyperplasia[J]. World Journal of Endocrine Surgery, 2017, 9(1): 16-19.
编辑:刘静凯
