多车环境下智能货车的紧急转向决策及轨迹规划
2024-03-22田国富张森
田国富, 张森
(沈阳工业大学机械工程学院, 沈阳 110870)
中国人口老龄化升高,但运输行业劳动力需求却逐渐增加,因此发展无人驾驶货车技术有重要意义。货车在高速行驶时,当前方发生追尾,急刹停车、甩尾等紧急情况,进行紧急刹车,可能导致货物脱落、刹不住车、侧翻等危险情况,因此针对汽车在突发情况下进行紧急转向避障的决策规划成为研究的热点。
针对换道决策,目前主要分为轻决策和重决策。轻决策是将避障空间进行离散化,设计代价函数,采用动态规划在离散的空间进行求解,从而得到凸空间进行避障。这种方式可以处理复杂场景,但这种方式计算量很大,对感知定位要求很高。重决策主要综合自车与障碍物的距离、相对速度、周围环境等信息,根据人给定的规则判断给出决策,主要缺点是场景太多无法覆盖,但这重决策计算量小,决策时间短。百度的Apollo3.0之前的版本使用的决策为轻决策,Apollo3.5之后的版本采用的是重决策。
轨迹规划分为全局和局部,全局路径规划有A star算法、Dijikstra算法等一些比较经典的算法和蚁群算法等一些智能算法,局部轨迹规划的主要方法主要有多项式曲线插值法、改进人工势场法、贝塞尔曲线法、B样条曲线法等,文献[1]采用双五次多项式方法进行轨迹规划,相比较五次多项式具有较高的实时性,但该规划方法未考虑目标车道上行驶的车辆对自车的影响。文献[2]用快速搜索随机树算法对五次多项式进行优化,提高了算法收敛速度,保证了轨迹的平滑。文献[3]用传统人工势场法进行轨迹规划,在将引斥函数进行改进,从而达到局部避障的目的。文献[4]采用基于贝叶斯优化的XGBoot换道决策,同时采用五次多项式进行规划提升了换道效率。文献[5]基于深度学习改进决策模型,采用三次多项式并用代价函数求出最优的换道轨迹。文献[6]采用基于模型预测控制的动态轨迹规划方法,该方法可以达到较好的避障效果,但由于其在规划中计算量大,不适于紧急转向避障的轨迹规划。文献[7]通过建立人工势场的引斥力函数,规划出一条避障轨迹。
针对多车环境下,前方发生突发事件时的智能货车紧急转向避障的问题,现通过建立模糊规则,比较左右车道的安全性来决定货车的行驶动作,同时提出使用三阶贝塞尔曲线规划出换道轨迹,并对换道距离和最大的侧向加速度进行约束,使智能货车能平稳安全地进行紧急转向避障。
1 紧急避障策略
当无人驾驶货车在高速行驶时,前方发生突发工况,这时需要进行紧急避障决策,通过对左右车道的换道条件进行安全评估,当左右车道只有一个满足换道条件时,向满足换道条件的一侧进行避障,当两侧都满足换道行为时,通过比较左右车道安全性大小,使货车向更安全的一侧进行避障,如果都不满足,则进行刹车减速,等到符合转向避障安全时,进项转向避障。无人驾驶货车避障策略如图1所示。
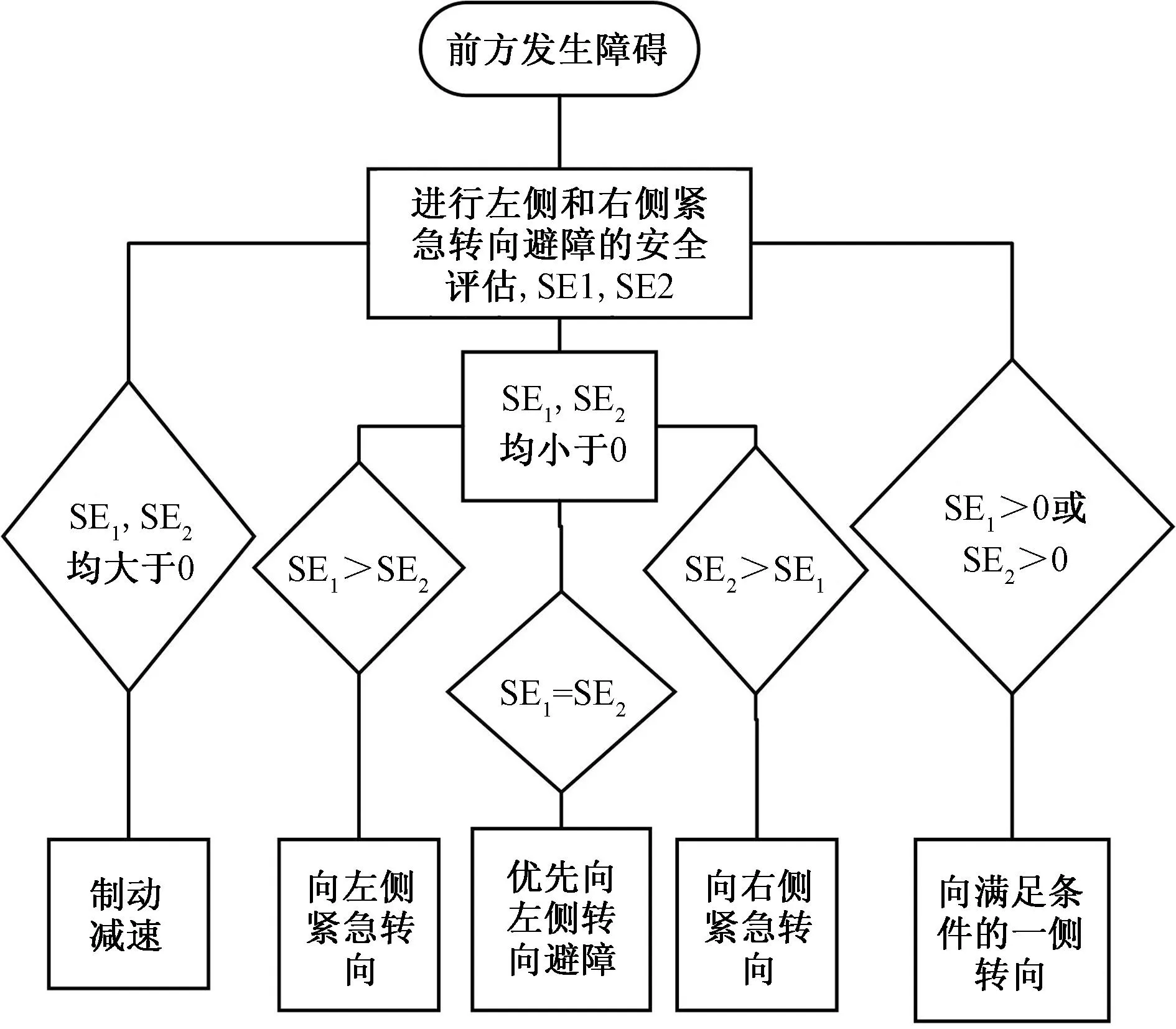
SE1为左车道安全值;SE2为右车道安全值
2 建立换道安全距离
假设目标车道的行驶车辆为人为驾驶,建立自车与目标车道后方车辆的转向避障安全距离[8],以后方车辆的紧急刹车距离为换道的最小安全距离,考虑人的反应时间,设反应时间为0.5 s,则最小安全距离为

(1)
自车与目标车道前方车辆的紧急转向避障最小安全距离为

(2)
式中:vr、v、vf分别为转向时目标车道的后方车辆速度、自车速度、转向时目标车道前车速度;c为前方障碍物与自车的纵向距离。
将自车换道时的安全性依据两种最小安全距离建立模糊规则,将自车与目标车道后车的相对距离与最小安全距离的差值D1作为模糊输入1,语言变量设为5级,分别为负(N),零(O),正小(PS),正中(PM),正大(PB),设目标车道汽车的最大行驶速度限制为120 km/h,最小行驶速度限制为60 km/h,令最小安全距离与目标车道后车的差值在范围[-110,-10]为负(N),[-10,20]为零(O),[10,50]为正小(PS),[40,80]为正中(PM),[60,90]为正大(PB)。隶属度函数图像如图2所示。
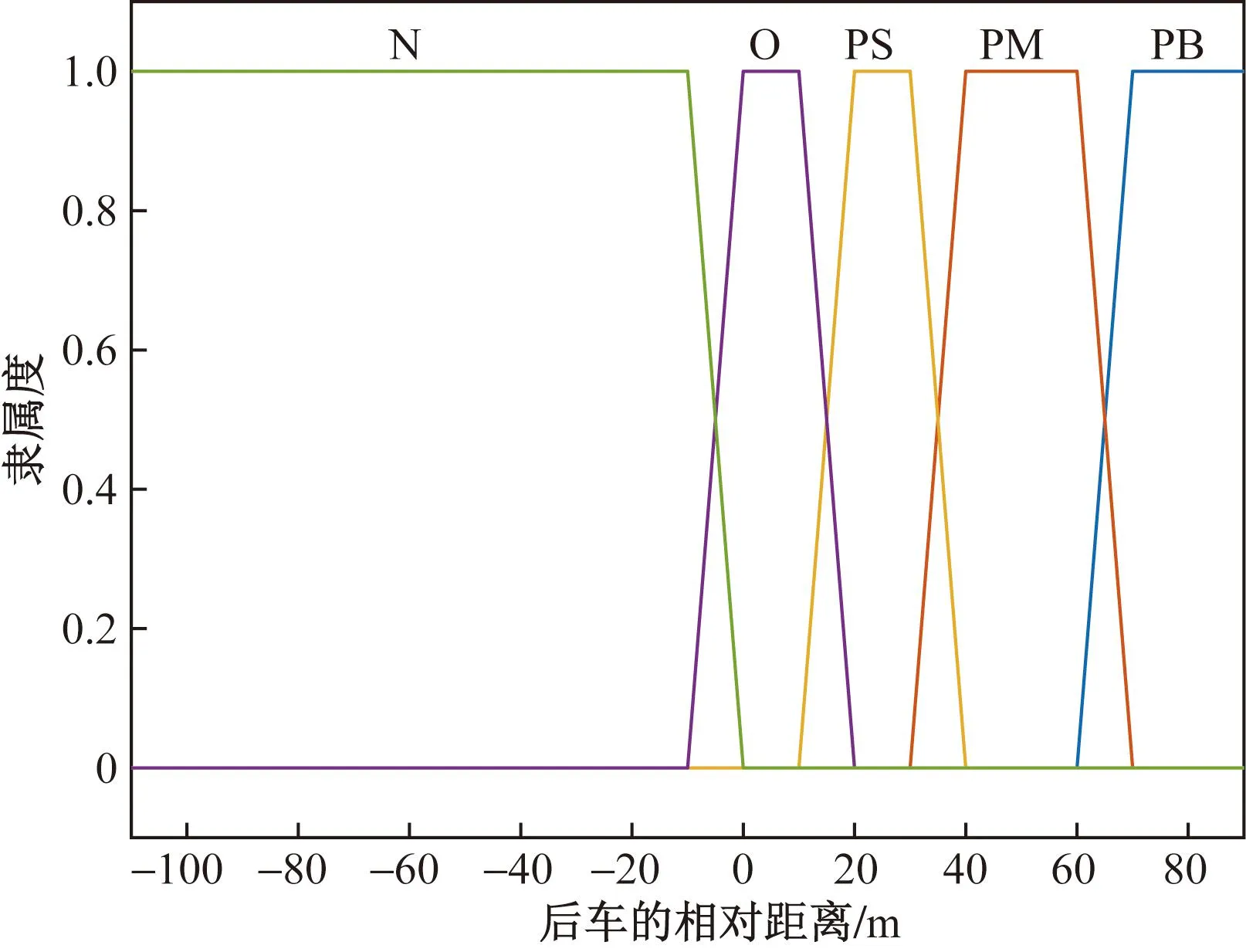
图2 后车输入变量的隶属度函数
自车与目标车道前车的相对距离与最小安全距离的差值D2作为模糊输入2,令最小安全距离与目标车道后车的差值在范围[-50,-10]为负(N),[-10,30]为零(O),[20,60]为正小(PS),[50,90]为正中(PM),[80,150]为正大(PB)。隶属度函数图像如图3所示。

图3 前车输入变量的隶属度函数
输出为换道安全值SE,论域为[-1,1],语言变量设为7级,分别为负(N)、零(O)、正小(PS)、正中小(PMS)、正中(PM)、正中大(PMB)和正大(PB),隶属度函数图像如图4所示。通过输入输出构建模糊规则如表1所示。
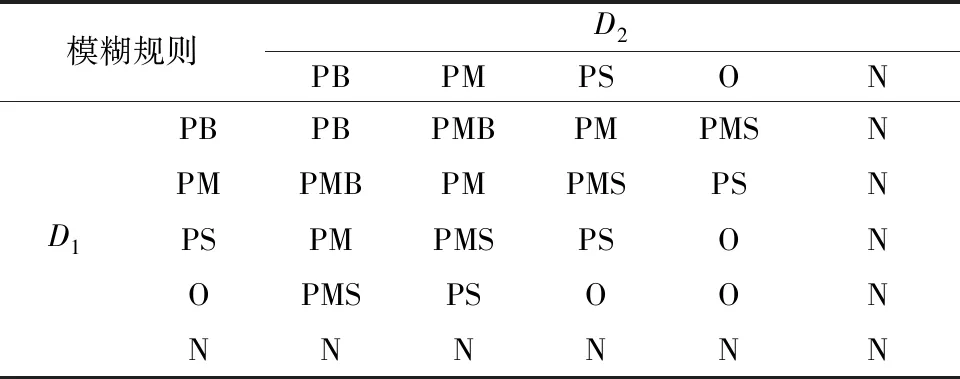
表1 模糊规则表

图4 输出安全值的隶属度函数
在换道决策时将左右目标车道上的前车和后车与自车的相对距离分别输入,然后查找模糊规则表,通过解模糊求出相应的安全值,比较安全值的大小,然后控制车辆向安全值较大的一侧转向避障。
3 局部轨迹规划
贝塞尔曲线[9]具有的几何特性不随着坐标系的变化而变化,曲线的始末控制点分别为曲线的起始点和终止点的特点,使贝塞尔曲线控制简单,易于跟踪,经常应用于无人驾驶汽车的局部避障[10]的规划轨迹中,并且还可以通过改变贝塞尔曲线控制点的坐标进而达到控制曲线曲率和曲线弯曲方向目的,由于在紧急转向时的轨迹不仅需要具有平滑的曲线和连续的曲率,而且要求在规划时需要更少的计算量来减少计算时间,因为三阶贝塞尔曲线与其他高阶贝塞尔曲线相比仅需要4个控制点就可以规划出一条连续平滑的轨迹,可以减少规划轨迹的计算量,所以选择三阶贝塞尔曲线作为避障规划轨迹的曲线。
3.1 贝塞尔曲线公式
设P0、P1为曲线的两个控制点,t的取值为0~1,则一阶贝塞尔曲线可表示为
p1(t)=(1-t)p0+tp1
(3)
设P0、P1、P2为曲线的3个控制点,t的取值为0~1,由于P0、P1构成一阶贝塞尔曲线,P1、P2构成一阶贝塞尔曲,可得
p1,1(t)=(1-t)p0+tp1
(4)
p1,2(t)=(1-t)p1+tp2
(5)
则在此基础上可生成二阶贝塞尔曲线为
p2(t)=(1-t)p1,1+tp1,2
(6)
通过一二阶贝塞尔曲线公式可推出,当P0、P1、P2、P3共4个控制点已知时,P0和P1、P1和P2、P2和P3都构成一阶贝塞尔曲线,即
p1,1(t)=(1-t)p0+tp1
(7)
p1,2(t)=(1-t)p1+tp2
(8)
p1,3(t)=(1-t)p2+tp3
(9)
由3个一阶曲线可推出如下的两个二阶曲线
p2,1(t)=(1-t)p1,1+tp1,2
(10)
p2,2(t)=(1-t)p1,2+tp1,3
(11)
由此可推出三阶贝塞尔曲线为
p3(t)=(1-t)p2,1+tp2,2
(12)
将式(3)~式(11)代入(12)可得三阶贝塞尔曲线的表达式为
(13)
汽车在直角坐标系中的坐标为(x,y),需要将曲线公式转换为x,y分别关于t的函数。
设x,y关于t的参数方程为

(14)
将式(13)转换为矩阵表达式为

(15)
将式(14)代入式(15)得

(16)
(17)
回代系数a、b后整理可得道直角坐标系下的三阶贝塞尔曲线。

(18)
由曲率的定义可知
(19)
式(19)中:x′、y′、x″、y″分别为汽车的纵向速度、横向速度、纵向加速度、横向加速度。
3.2 确定4个控制点的坐标
设第一个控制点为初始点(0,0),则P0(x0,y0)=(0,0),第二个控制点为P1(x1,y1)假设车辆初始航向角为0°,则P1(x1,0),第三个控制点为P2(x2,y2),第四个控制点为P3(x3,y3),再换道避障时,为了安全的考虑通常将换道的结束点的横坐标设置为道路中心线,由中国道路的标准宽度为3.75 m,可知P3(x3,3.75),P2(x2,3.75),为了更快地计算控制坐标,规划避障轨迹将4个点设计为中心对称的形式,如图5所示,可以得到x2=x1,x3=2x1,P2(x2,3.75)=(x1,3.75),P3(x2,3.75)=(2x1,3.75),由4个控制点坐标的表达式可知,它们都与x1相关联,因此只需求出x1的大小就可以将三阶贝塞尔曲线的形状确定。

图5 三阶贝塞尔曲线
3.3 规划轨迹的边界约束
针对货车在紧急转向避障时可能发生的危险,将对货车在紧急转向时规划轨迹的边界进行约束,如图6所示。

图6 规划轨迹边界约束
货车在进行紧急转向时由于自身质量大,质心高,如果转向时横向加速度过大,可能会导致货车发生侧翻,摆尾等危险情况发生,为了避免这种危险,要对货车的横向加速度进行约束。车辆静态稳定性公式为

(20)
可以推导出车辆的瞬时平衡方程为

(21)
式中:Fzl为左侧车轮的垂直载荷;ay为转向时的横向加速度;lw为车轮轮距;h为车辆质心高度。
由式(21)得到左侧车轮的垂直载荷为

(22)
由式(22)可以得出,当横向加速度为0时,左侧车轮的垂直载荷为mg/2,当横向加速度不断增大,直到左侧垂直载荷为0时,此时的横向加速度为
(23)
这时的车辆状态为货车发生侧翻的初始状态,aymax为车辆准静态下侧翻的阈值[11]。在实际驾驶中,车辆的瞬态侧翻阈值明显小于准静态阈值,一般仅为准静态侧翻阈值的30%~50%[12]。通过仿真实验的车辆模型数据可得到aymax=0.9g,选取动态侧翻阈值的大小为准静态的30%,则
aymax≤0.27g
(24)
由图6可知,此时的R1和X1为
(25)

(26)
式中:v为自车行驶速度;Xl为控制点P1(x1,y1)中x1的最小距离。
在避障时需要考虑在换道时是否会与前方障碍物发生碰撞,对车辆换道时的碰撞边界进行约束。在与前方障碍车辆不发生碰撞的极限车距进行避障,如图3的碰撞边界所示,以车辆自身为圆心,r为半径建立圆形车辆几何形状模型进行约束分析。

(27)

(28)

(29)
(30)

(31)
式中:ay2为碰撞边界的最大横向加速度;y为道路宽度;r为车辆半径;w为车辆宽度;l为车辆长度;d为换道时不发生碰撞的两车的最小横向距离;v为自车纵向速度;Xr为控制点P1(x1,y1)中x1的最大距离。
稳定性边界和碰撞边界的约束只能规划出保证车辆不发生侧倾和碰撞轨迹,为了规划出最合理的轨迹,做下列约束。
(1)在轨迹的初始点应使轨迹曲率尽可能趋近于0,这样可以使车辆更好地对规划的轨迹进行跟踪。
(2)由式(27)可知,在换道过程中车辆的转向半径与车辆的横向加速度成反比,同时轨迹的曲率与转向半径成正比,因此在换道过程中对最大横向加速度的约束可以转为对轨迹的最大曲率的约束。
(3)换道中间位置车辆朝向与车道线之间的夹角θ,应满足0°<θ<45°的条件[13],此约束条件可以变为当参数t=0.5时的道路曲率约束。
通过上述约束可设计代价函数为
J=min(J1+J2+J3)
(32)
式(32)中:J1=kt=0;J2=kmax;J3=dy/dx(当t=0.5时)。各个约束条件[14]如下。

(33)
对上述代价函数求解[15],采用MATLAB中自带的fmincon函数来求解非线性函数有约束优化问题的极小值。

(34)
由式(34)可以求出不同车速下,三阶贝塞尔曲线中控制点P1(x1,0)中x1的最优解。其中S为距离前车安全的转向车距,一般取值为(2~3)v。根据P1(x1,0)然后得到控制点P2(x2,y2),P3(x3,y3)的坐标,从而得到不同车速下对应的贝塞尔换道曲线如图7所示。
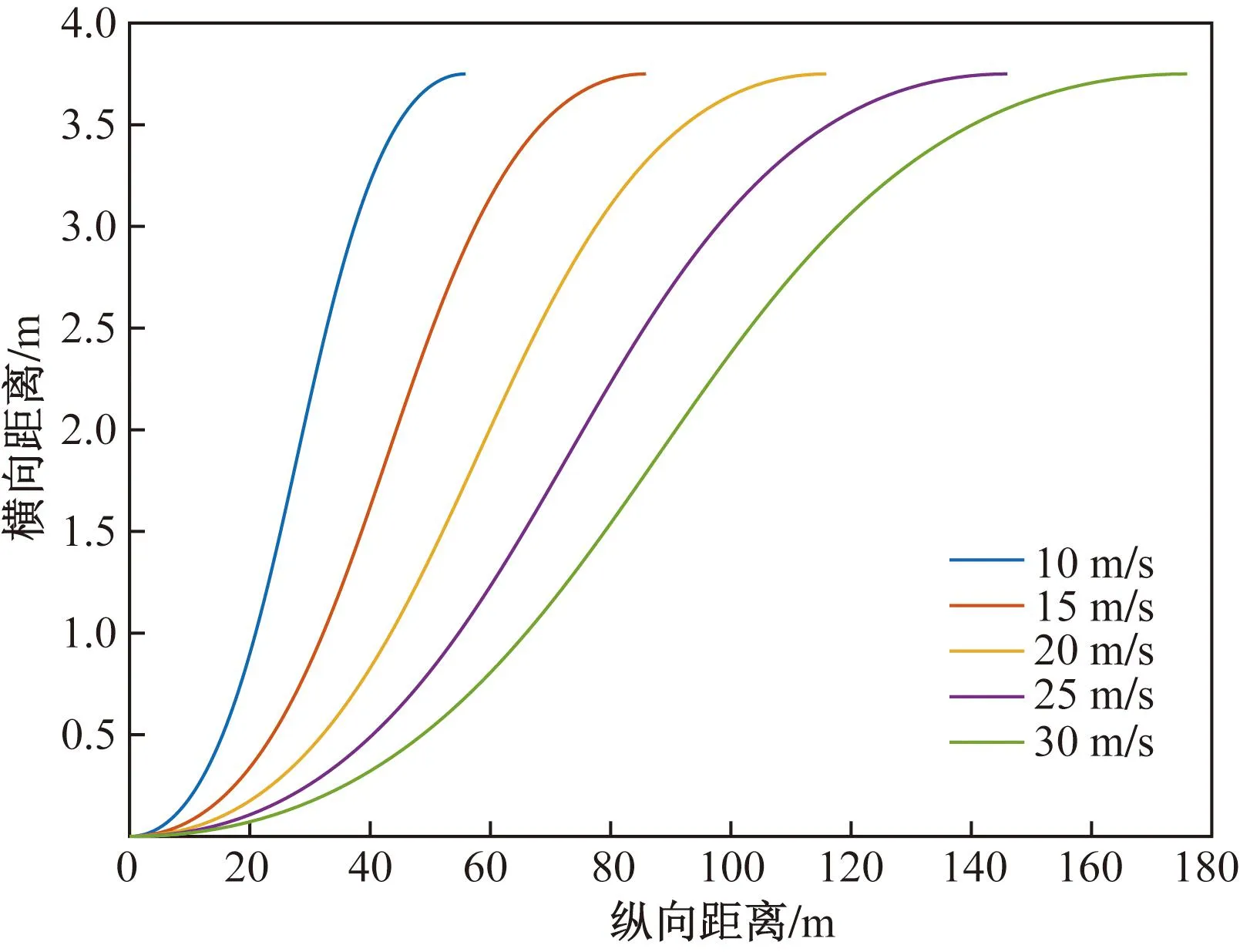
图7 不同车速下的避障轨迹
低速行驶时货车转向时发生侧翻的可能性远远小于高速行驶时侧翻的可能性,因此对20、25、30 m/s 3种行驶速度所规划出的道路曲率进行计算,如图8所示。
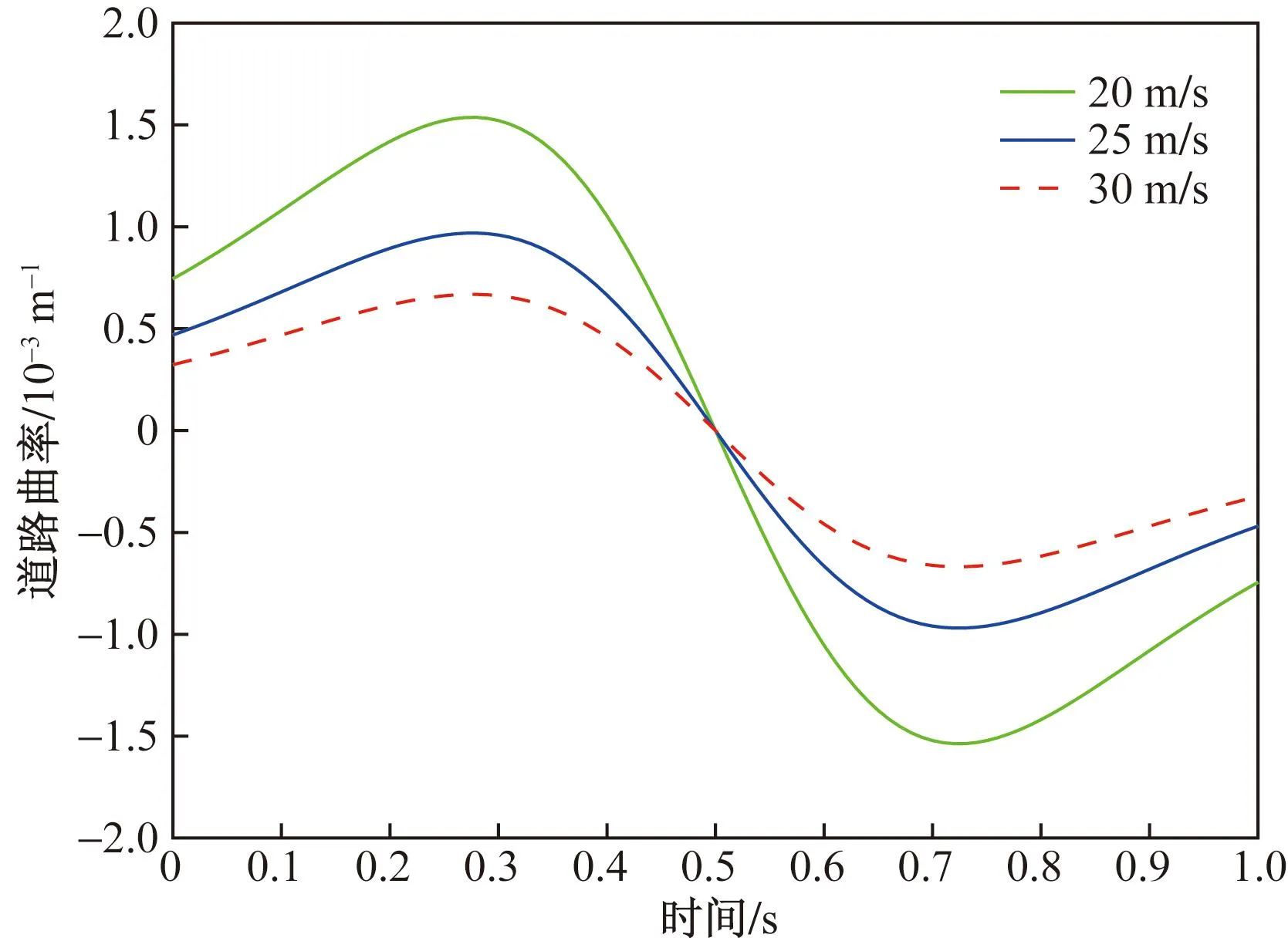
图8 不同轨迹下的道路曲率
计算得到3种速度对应的最大道路曲率分别为0.001 5、0.000 97、0.000 66,均小于对应的最大道路曲率值Kmax,则规划轨迹满足转向要求。
4 仿真检验
情景一:当前方紧急情况,此时自车速度为100 km/h,右侧车道后车速度为90 km/h,与自车距离为20 m,右侧车道前车速度为90 km/h,与自车距离为10 m,左侧车道后车速度为100 km/h,与自车距离为80 m,左侧车道前车速度为100 km/h,与自车距离为70 m。此时右侧不满足避障条件,左侧满足避障条件。使用carsim仿真软件中自带的utility truck货车模型进行仿真,结果如图9~图11所示。

图9 左侧避障仿真

图10 左侧避障过程中的横向加速度变化
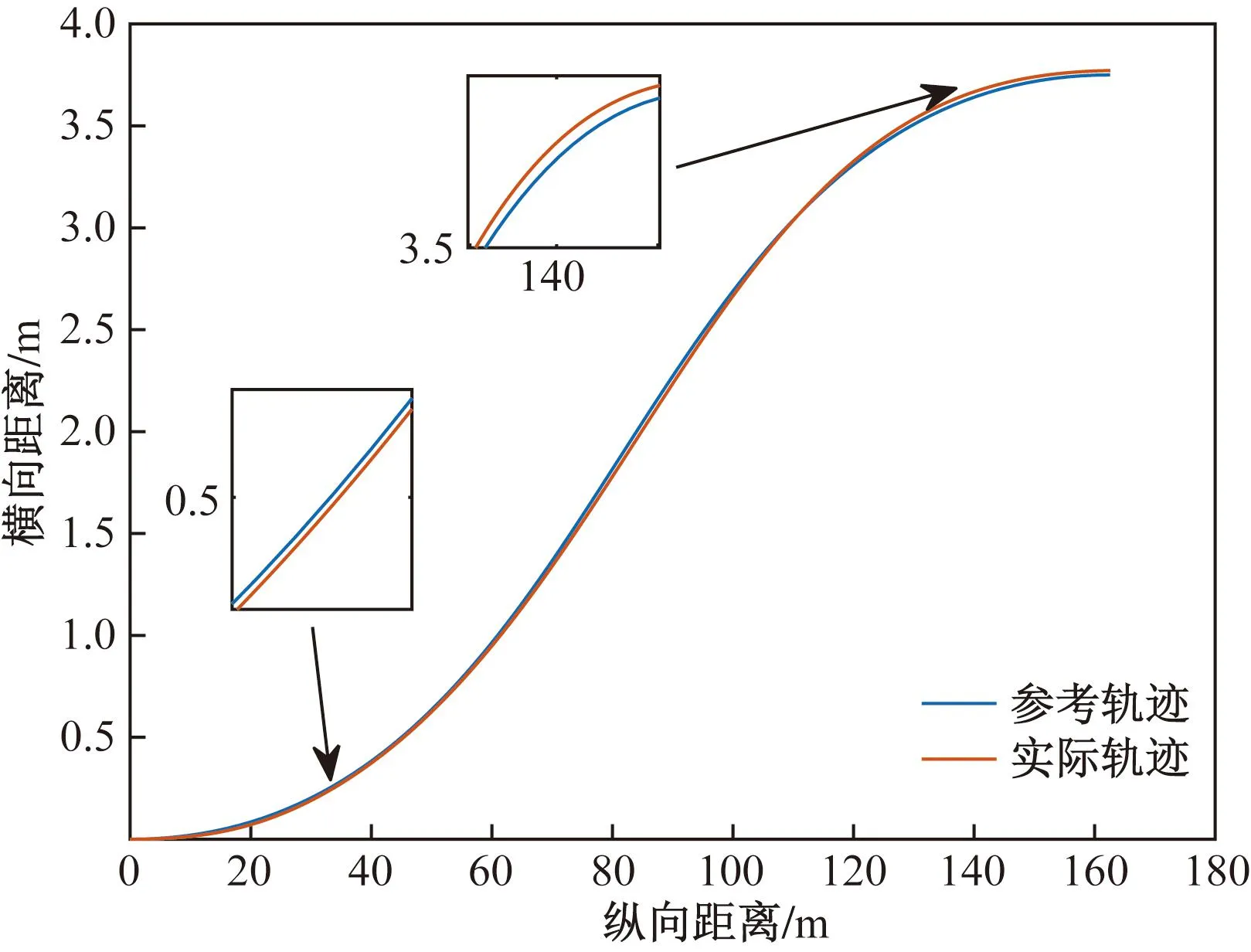
图11 左侧避障轨迹的跟踪效果
情景二:前方发生紧急情况时,此时自车速度为90 km/h,右侧车道后车速度为90 km/h,与自车距离为60 m,右侧车道前车速度为90 km/h,与自车距离为50 m,左侧车道后车速度为100 km/h,与自车距离为20 m,左侧车道前车速度为100 km/h,与自车距离为10 m。此时左侧不满足避障条件,右侧满足避障条件,结果如图12~图14所示。

图12 右侧避障仿真
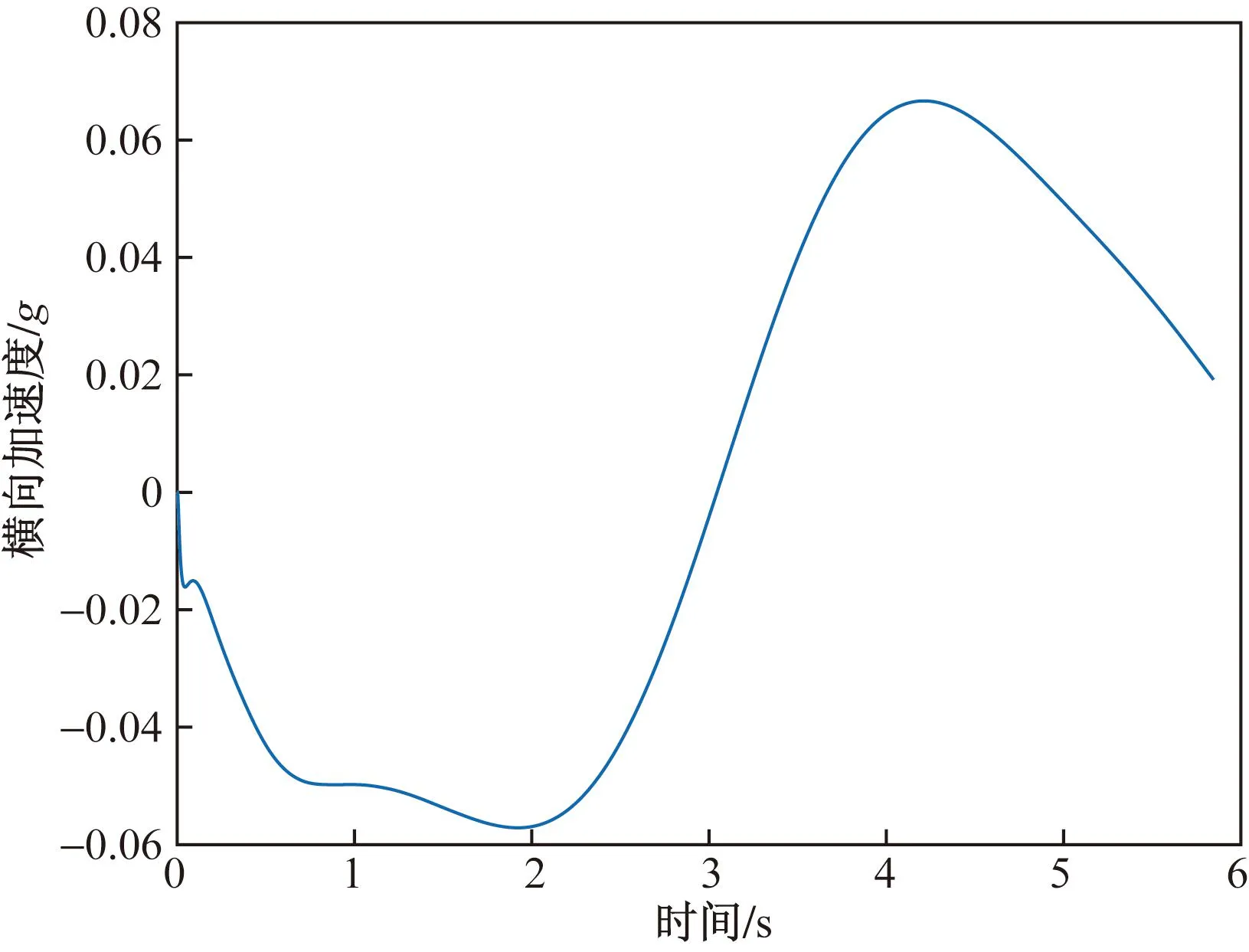
图13 右侧避障过程中的横向加速度变化

图14 右侧避障轨迹的跟踪效果
5 结论
通过仿真结果可以得出以下结论。
(1)货车在前方出现突发情况下,采用根据人的经验建立的模糊策略生成的决策,可以有效地应对多车环境下的紧急转向是向左侧还是右侧转向避障的问题,避免了可能与目标车道行驶车辆碰撞的风险,提高了货车在紧急转向时的安全性。
(2)然后根据在转向初始时自车不同的速度,规划出该速度下最合适的三阶贝塞尔局部避障曲线,经过规划轨迹和实际轨迹的对比,该规划轨迹可以让货车较好地跟踪,从而实现躲避障碍物。
(3)通过两次仿真得出的不同速度下转向时的最大横向加速度均小于规划轨迹的最大横向加速度,满足在紧急转向时减小货车侧翻的风险的目的。
