复合电源电动汽车双模糊控制能量管理策略设计
2024-03-21杨磊白志峰王娟黄琳
杨磊,白志峰,王娟,黄琳
(西安建筑科技大学 机电工程学院,西安 710055)
随着目前新的储能技术如超级电容、电池管理技术的快速发展,复合电源作为一种新的电动汽车储能解决方案,成为研究热点,研究领域集中在储能材料开发、储能材料的建模与参数匹配、电源拓扑结构设计、电源转换技术、能量管理技术等方面[1-4]。能量管理作为复合电源系统核心,目的在于合理分配锂电池与超级电容的输出功率,防止锂电池因为功率输出过高导致输出电流过高,同时在电动汽车制动能量回收时,利用超级电容的功率特性提高能量回收率[5-6]。
目前能量管理策略总体分为两大类,基于规则的控制策略与基于最优化的控制策略。其中基于规则的能量管理控制策略控制简单、实时性高、鲁棒性高且易于实现,包含两类:基于确定性规则与基于模糊逻辑规则的控制策略[7]。但由于汽车运行工况的多样性与复杂性,导致基于规则的控制策略对环境适应性差,动态调整能力差[8]。基于优化的策略分为全局优化和局部优化控制策略,包含诸如动态规划、遗传算法、模型预测控制、强化学习、神经网络等方法。由于基于优化的控制方式最优化过程计算量大,在线运行实时性低,应用局限性较大[9]。为了解决以上两种控制策略的适应性与实时性问题,许多研究者选择将多种控制方式进行结合,如文献[10]利用DP 算法对离线工况功率分配进行分析优化,并与基于规则控制策略相结合,文献[5]利用遗传算法对模糊逻辑算法的隶属度函数及相关参数进行优化,文献[11]将马尔可夫预测模型与模糊逻辑控制相结合,以上控制策略在一定程度上解决了单一控制策略适应性差与实时性低的问题。
在基于模糊逻辑控制的能量管理策略中,多以功率跟随作为控制对象,通过需求功率、超级电容SOC、锂电池SOC 状态作为模糊控制的输入获得超级电容输出功率,这样的控制策略在一定程度上与基于确定规则的控制策略相比,具有更高的鲁棒性和自适应性[12-15]。但汽车运行过程当中需求功率波动范围较大,各功率区间的变化频率也不同,超级电容作为功率型器件,容量较低,不适合长时间连续供电,所以需要合理控制超级电容在各功率需求区间放电功率大小与速度。其次,在制定模糊控制策略时,汽车需求功率的模糊子集会划分太多导致模糊控制规则数量过大,不便于实际分析;划分太少会导致输出功率控制不够精准,对于工况适应性较差。本文设计了复合电源电动汽车整车模型与能量管理控制策略,并利用MATLAB/Simulink 与AVL CRUISE软件对所提出的能量管理策略进行验证,针对所设计车型,利用功率区间特征制定双模糊能量管理控制器,既降低了模糊控制系统的分析与建立复杂度,同时也使得超级电容输出功率大小和速度更加合理,有效地保护了锂电池。
1 复合电源系统参数匹配
1.1 复合电源系统汽车模型结构
AVL CRUISE 软件作为系统级仿真软件,其模块化的设计方式以及与MATLAB/Simulink 良好的接口功能,使其在电动汽车的建模和仿真中具有非常大的优势[16]。通过AVL CRUISE 搭建整车模型,利用MATLAB/Simulink 建立控制策略,对特定汽车实现能量管理策略的仿真验证。根据超级电容、锂电池与电机连接形式以及DC/DC 转换器连接数量,复合电源系统目前分为4 种拓扑结构:全主动式、电容半主动式、锂电池半主动式与被动结构。由于电容半主动式结构在控制性能与系统成本上有较好的平衡[17],本文采用电容半主动式结构,结构如图1 所示,通过对DC/DC 模块的控制,达到对超级电容的能量输出与能量回收控制目的。整车采用前轴驱动结构,AVL CRUISE 复合电源系统整车模型如图2 所示。

图2 复合电源电动汽车模型Fig.2 The model of Hybrid Storage Electric Vehicle
1.2 汽车动力系统模型参数匹配
本文所设计复合电源电动汽车车型整车基本参数和相关性能指标参数如表1 与表2 所示。

表1 整车基本参数Tab.1 Entire vehicle's basic parameters

表2 整车性能指标参数Tab.2 Vehicle performance index parameters
由于永磁同步电机具有功率密度高、转矩性能好、控制效果佳等优势[18],本文驱动电机采用永磁同步电机。基于动力学分析[19-21]可知电机峰值功率需要满足
式中Pv为汽车在平坦路面上满足最大车速所需功率,即
Pi为最大爬坡度条件下所需功率,即
Pa为汽车加速过程所需功率,采用经验计算公式[22],即
式中:um、tm为汽车起步加速过程的最终车速和加速过程所需的时间。最终电机参数如表3 所示。
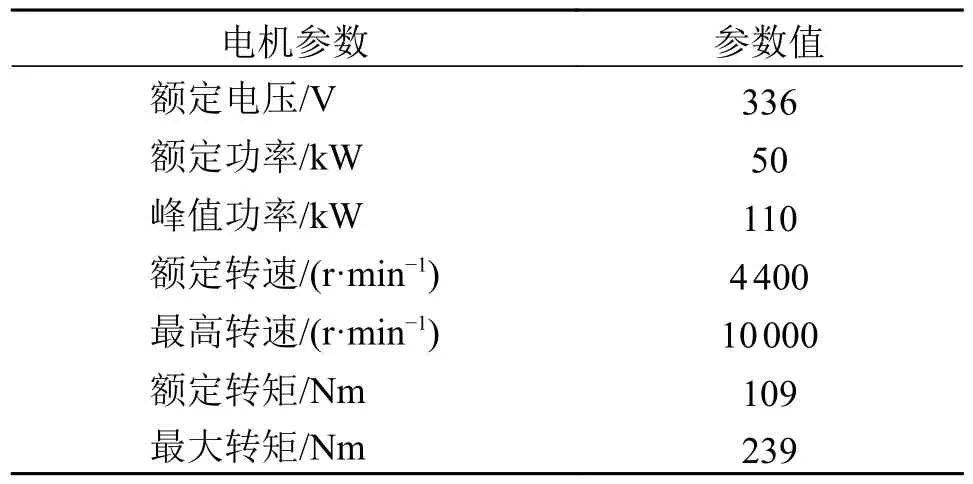
表3 电机基本参数Tab.3 Basic parameters of the motor
1.3 锂电池与超级电容参数匹配
根据汽车续驶里程目标,在平坦路况下,汽车所需总能量计算公式[22]为:
式中:PL为汽车巡航过程所需功率;ua为巡航速度;L为续驶里程;W为总能量需求。由电机电压等级Um以及电机峰值功率Pmax可知,电池串联数量为
最低并联数量为:
式中:PBmax为单体电池输出最大功率; ηm为电机效率; ηmc为电机控制器效率;E为单体电池电动势;Rint为单体电池内阻。同时,为满足汽车续驶里程目标有:
式中:WB为电池组总能量;Cb为单体电池容量;ξsoc为单体电池放电深度; ηb为电池放电过程总效率;N3为单体电池数量。
超级电容总容量与电压之间关系[23-24]为
式中:Ut超级电容实时端电压;Umin为超级电容放电截止端电压;N为超级电容串并联数量总和。
汽车在加速过程中,所需总能量为
式中:Pj为加速过程所需功率;t为加速时间。
为满足加速过程功率需求则有如下关系
式中 η为系统整体传递效率。电源系统参数匹配结果如表4 所示。
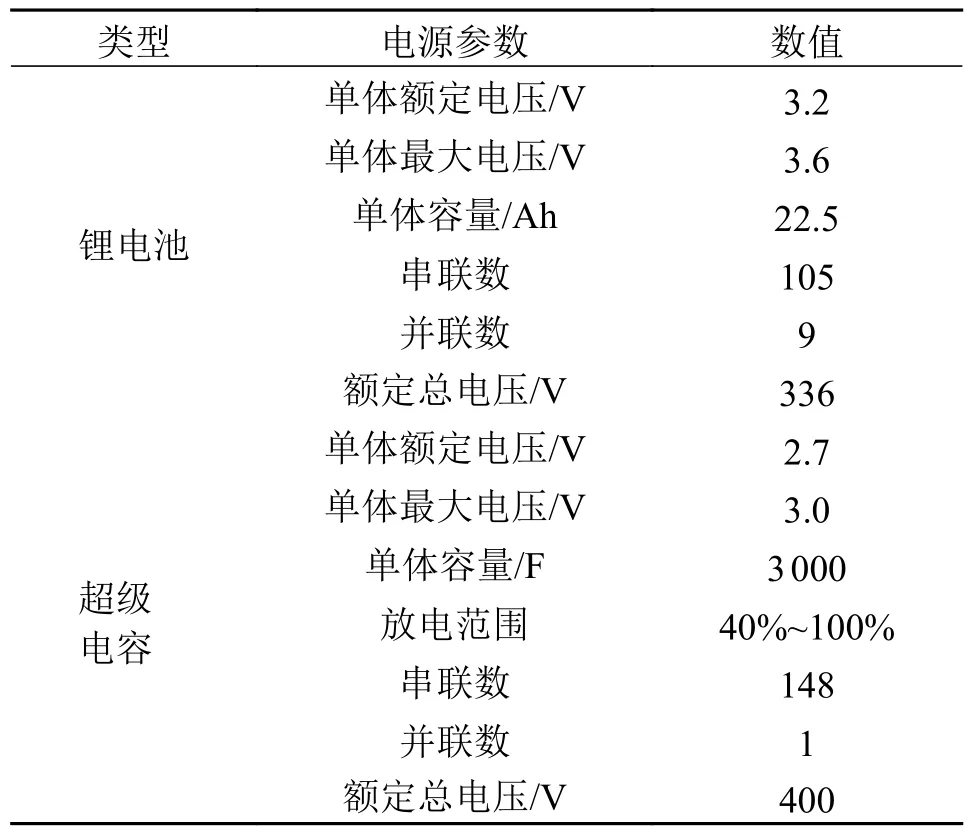
表4 锂电池与超级电容参数Tab.4 The basic parameters of lithium battery and supercapacitor
2 能量管理策略建立
本文所设计能量管理策略结构如图3 所示。利用需求功率跟随的双模糊控制器获得超级电容输出功率占比,再通过驾驶意图识别对超级电容输出功率进行调节,使其更加符合工况特征。
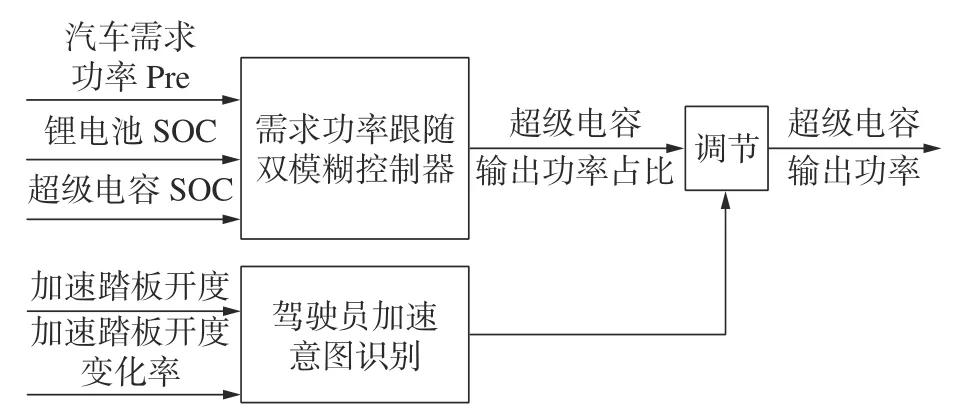
图3 能量管理策略结构图Fig.3 The structure of energy management strategy
2.1 驾驶员加速意图识别
驾驶员的加速控制踏板作为需求功率与需求转矩的控制变量,加速踏板开度及其变化情况反映了驾驶员车速需求。制定加速意图识别策略,输入为加速踏板开度与变化率,输出为加速意图大小,输入输出论域分别设置为[0,1]、[0,0.1] 和[0,1];模糊子集定义为{SS(很小),S(小),M(中),B(大),VB(很大)},输入输出隶属度函数与控制规则库如图4 与表5 所示。
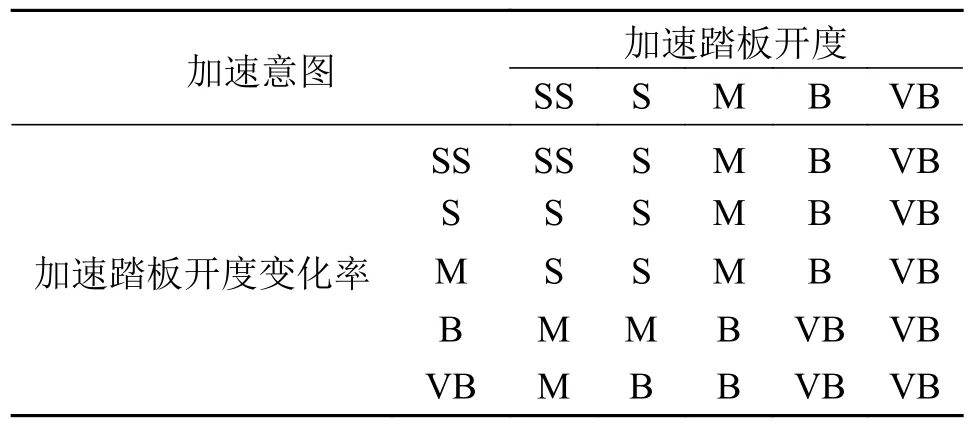
表5 加速意图识别规则表Tab.5 Rules table of acceleration intention recognition
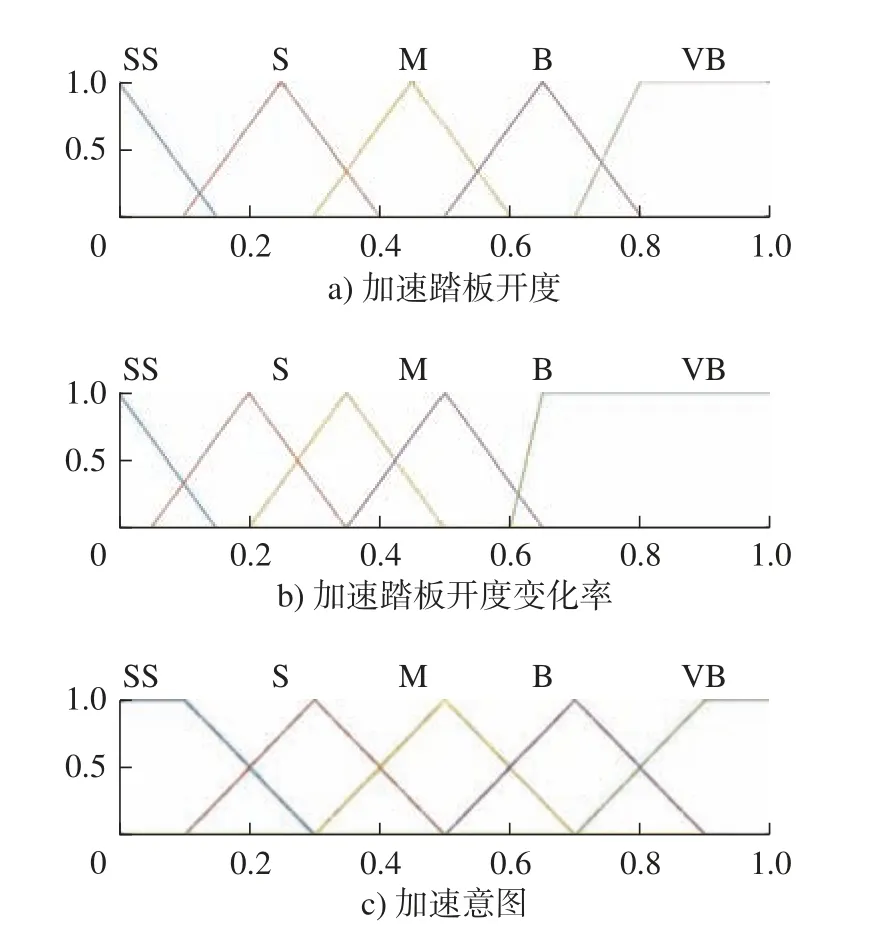
图4 加速意图识别输入输出隶属度函数Fig.4 The input-output membership function of acceleration intention recognition
2.2 双模糊控制能量管理策略建立
针对所设计车型,将汽车需求功率分为3 个层级,汽车需求功率小于电机额定功率10%区间划分为低功率区间,在电机额定功率10%~40% 范围内为中等功率区间,40%以上为高功率区间。超级电容在高功率区间内要能有效抑制锂电池大电流;在低中等功率区间内在削弱锂电池局部峰值电流的同时,还能保持较高剩余电量以满足未来时刻的大功率需求。
能量管理策略逻辑框图如图5 所示。图5 中SOCb 为锂电池剩余电量,SOCsc 为超级电容剩余电量,P为汽车需求功率,Pb为锂电池输入输出功率,Psc为超级电容输入输出功率。在汽车制动能量回收时,优先由超级电容回收能量。在低功率区间内,汽车由锂电池供电,同时若超级电容剩余电量未达到规定容量时,为满足未来时刻功率需求,锂电池以一定输出功率占比K为超级电容充电。当超级电容大于最低容量要求时,在中等功率区间内,利用模糊控制器1 获得超级电容输出功率占比K1;在高功率区间内,利用模糊控制器2 获得超级电容输出功率占比K2。分别建立以上中高需求功率区间内的模糊控制器,控制规则如表6 与表7 所示,表中SS、S、M、B 和VB 分别表示“很小”、“小”、“中”、“大”、“很大”。
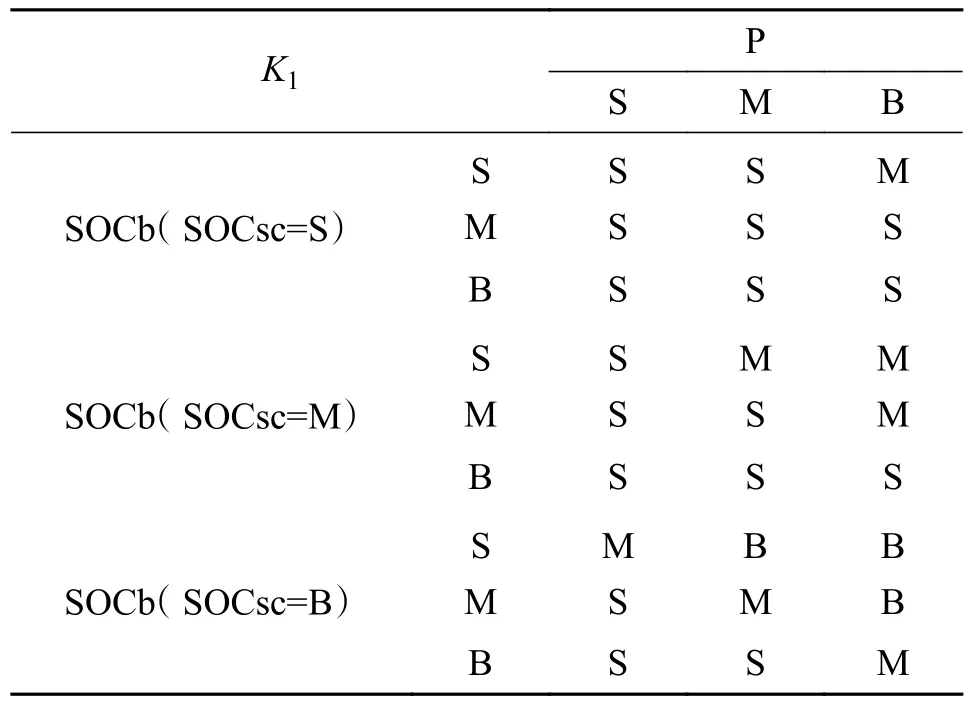
表6 K1 控制规则表Tab.6 K1 control rules
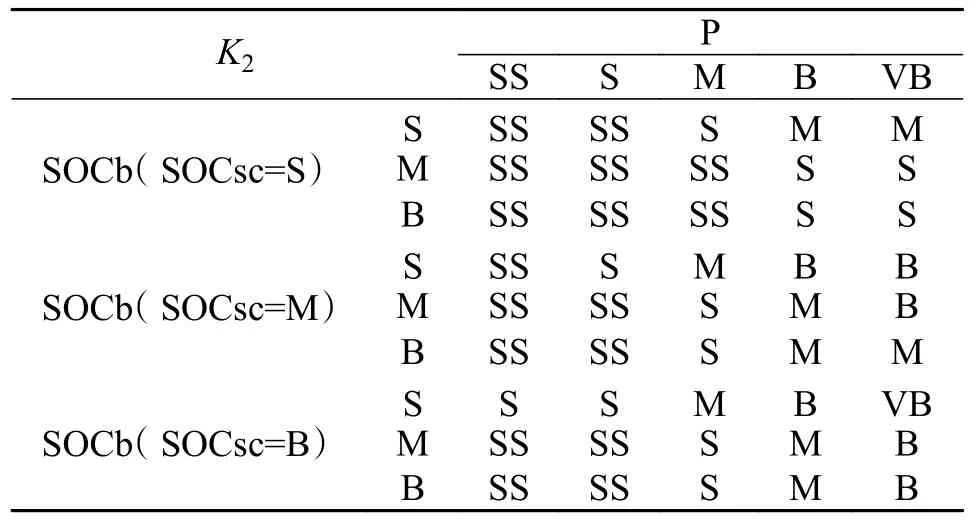
表7 K2 输出规则表Tab.7 K2 control rules
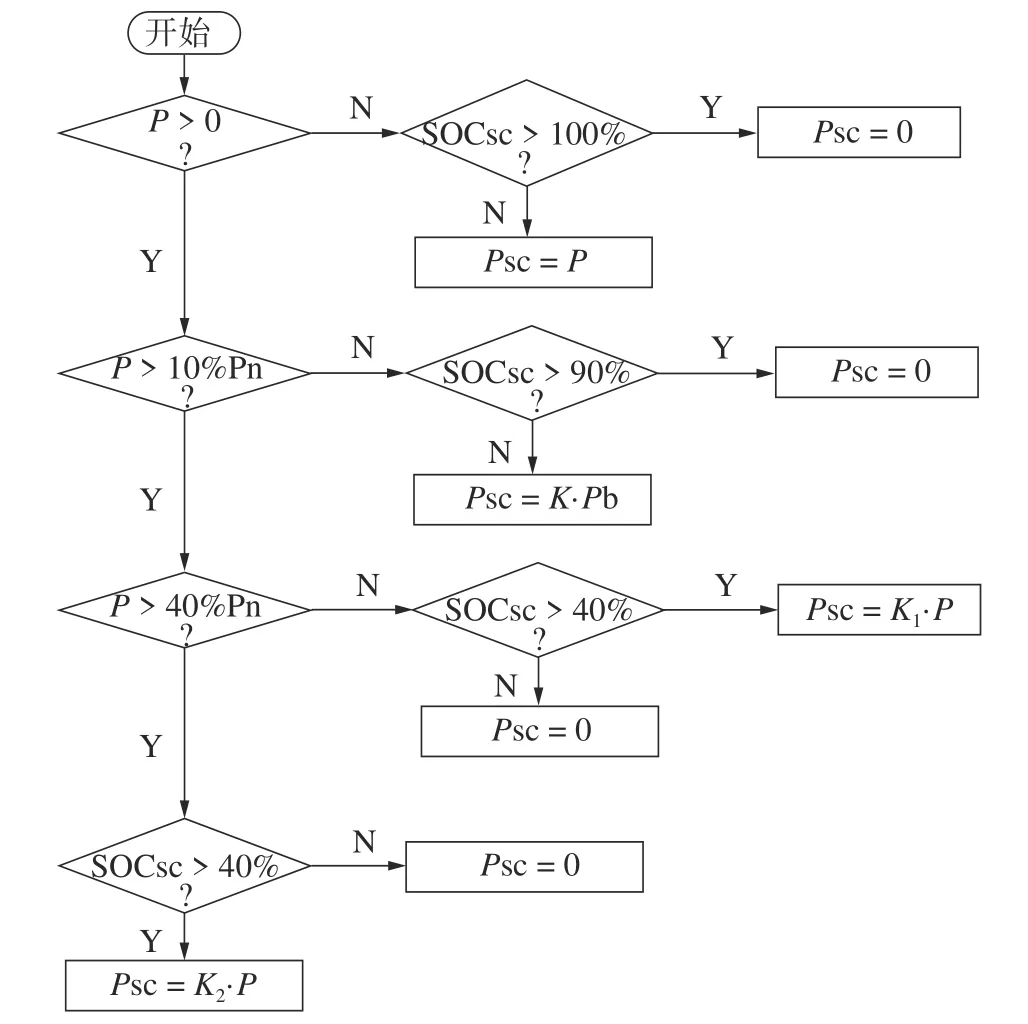
图5 能量管理策略逻辑框图Fig.5 The logical block diagram of energy management strategy
3 仿真分析
为了验证上述控制策略的有效性,在MATLAB/Simulink 当中建立了复合电源系统能量管理控制策略模型;将 Simulink 控制模型生成DLL 文件并集成到CRUISE 软件中进行仿真验证,其中锂电池模块初始SOC 为95%,超级电容模块初始SOC 设置为95%,在NEDC 与FTP75 工况条件下运行3 个循环。NEDC 与FTP75 循环工况及控制策略模型如图6 与图7 所示控制模型。
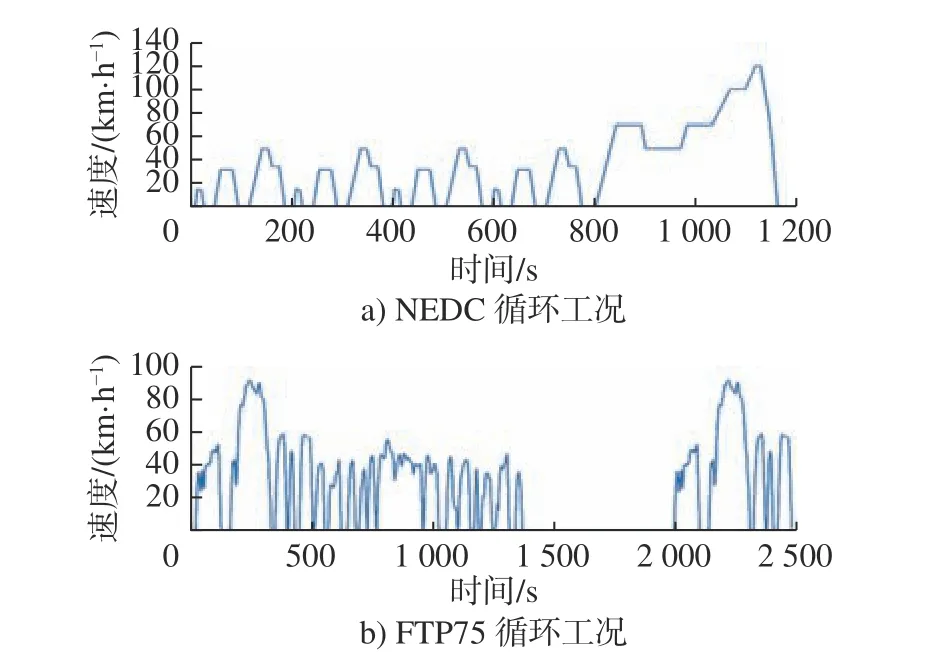
图6 循环工况Fig.6 Cycle conditions
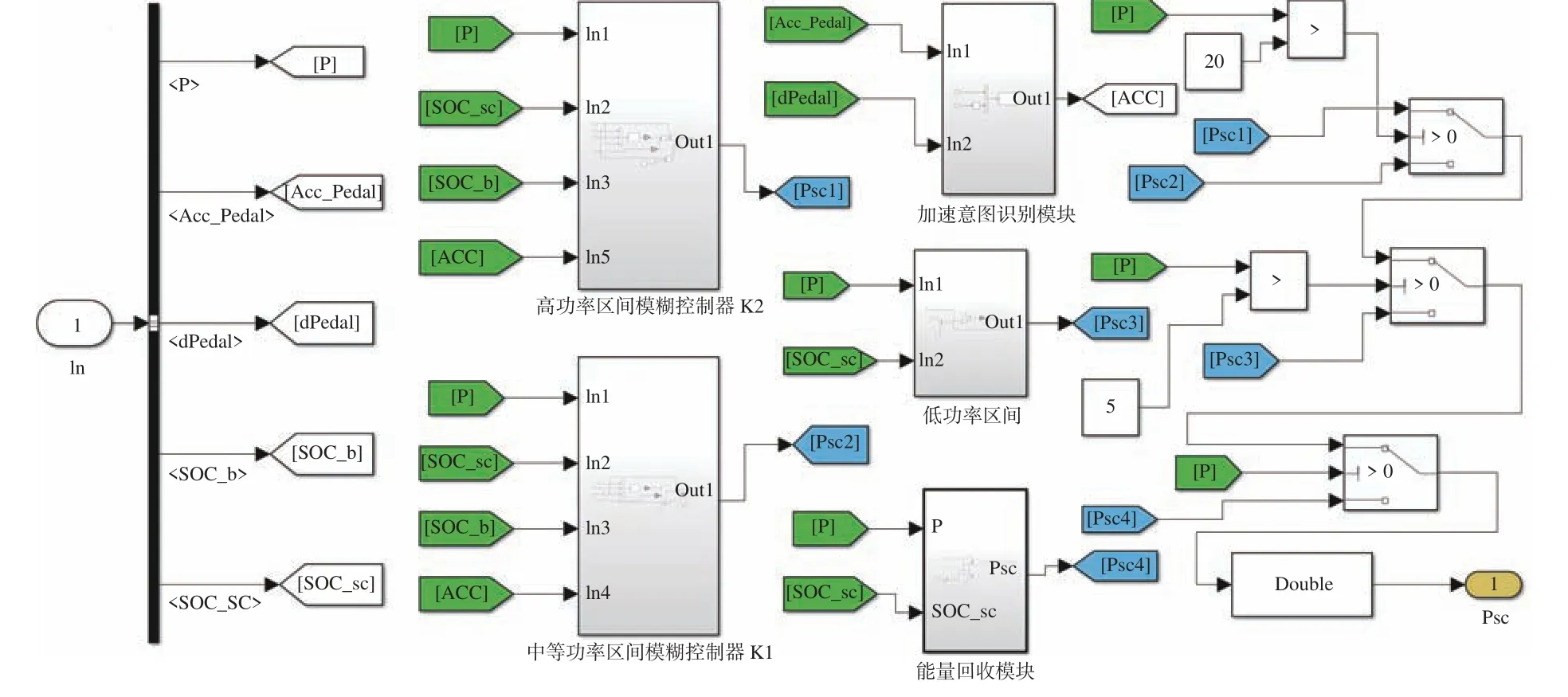
图7 复合电源系统能量管理控制策略 Simulink 模型Fig.7 The Simulink model of energy management strategy for hybrid storage electric system
图8 为锂电池与超级电容在两种循环工况条件下电流变化情况,由图中可知,本文所制定的能量管理控制策略在各功率需求空间,都有效抑制了局部峰值电流与最大峰值电流,其中最大峰值电流具体情况如表8 所示。同时与基于规则的控制策略与基于单一模糊控制相比,超级电容电流变化更为剧烈,有效抑制了锂电池电流波动,使得锂电池电流更为平稳,提高了锂电池的使用寿命和安全性,同时,NEDC 循环工况结束时,基于本文提出的控制策略下锂电池SOC 为87.19%,能量利用率最高,而单电源系统、基于规则与基于单层模糊控制策略分别为86.80%、87.15%、86.88%。
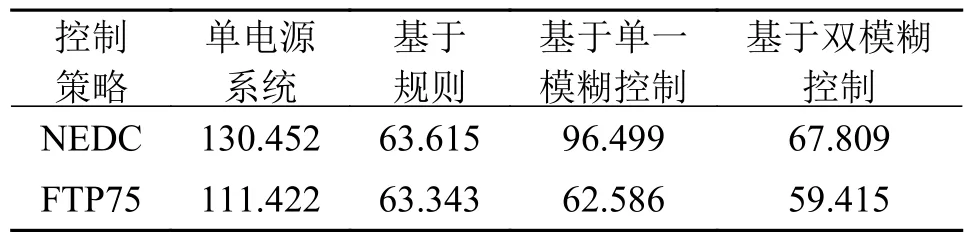
表8 循环工况下最大峰值电流Tab.8 Maximum peak current under different cycle conditions A
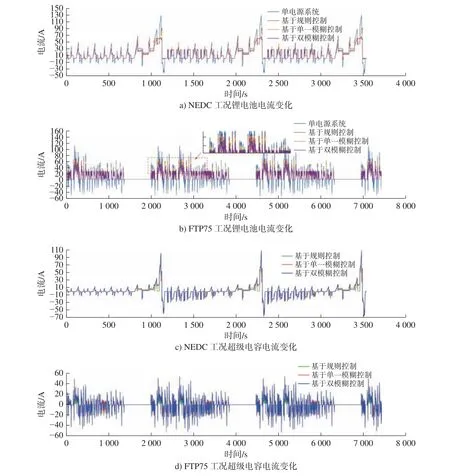
图8 锂电池与超级电容电流变化图Fig.8 The current changes of lithium battery and supercapacitor
4 结论
针对本文所提出的带驾驶意图识别修正的功率分层模糊控制能量管理策略,通过仿真对比表明,可得出以下结论:
1)通过对功率区间划分层次设计模糊控制器,降低了分析的复杂度,也增强了控制策略对工况的适应性。
2)所提出控制策略能很好的实现对锂电池电流波动的抑制与峰值电流削弱,同时能有效降低锂电池能量消耗效率,增强了对锂电池的保护作用。
3)利用AVL CRUISE 软件建立了整车模型,为各种控制策略的验证提供了便利性,整车仿真与实际情况也更加相符;其次所提出控制策略具有较好的实时性与鲁棒性,在系统级仿真软件AVL CRUISE平台上能快速稳定运行,具有一定的实用价值。
