三维激光扫描技术在异形结构表面积测算中的应用研究
2024-03-20宋秉红
宋秉红
(兰州市城市建设设计院,甘肃 兰州 730050)
0 引言
随着时代和科技的进步,表面积测算在多个领域都具有重要应用。如在农业和林业中,植物叶片面积是判断植物性能的重要依据;在法医司法鉴定中,损伤长度、瘢痕面积等成为具体伤残等级或程度的规定参考值;在建筑造价估算中,建筑物表面涂层施工面积是造价核算的主要依据。不规则目标物的表面积计算可分为接触式和非接触式测量。接触式测量需要直接接触待测物体,效率低且结果偏差大,可能对物体造成损害。而非接触式测量方法中,全站仪免棱镜测量法是应用最广泛的方法,该方法主要基于采集的特征点数据应用等高线法、DTM法、方格网法和有限元法等进行计算。随着城市中各类装饰美化工程的增加,如塑石等,其造价高,造型复杂,对其工程量(表面积)进行验收时精度要求高,目前常见的非接触型测量手段难以满足精度、效率要求[1-3]。
三维激光扫描技术是近年来发展较为迅速的一种测量技术,该技术具有无接触测量、精度高、单位时间内获取数据量大且受外界影响小等优势。本文以某异形雕塑表面积测算工程为例,利用三维激光扫描技术获取目标表面的特征信息,通过曲面拟合积分获得目标对象的表面积,然后统计计算三角面片面积获得不规则实体表面积,最后对表面积量算的精度和效率进行对比分析。
1 相关理论基础
1.1 三维激光扫描测量原理
三维激光扫描系统坐标原点位于扫描仪相位中心,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算目标点P与扫描仪的距离S,精密时钟控制编码器会同步记录每个激光脉冲的横向扫描角度值和纵向扫描角度值。根据旋转偏角及距离进行几何计算,从而获得目标点P的坐标,坐标测量原理如图1所示[4-5]。
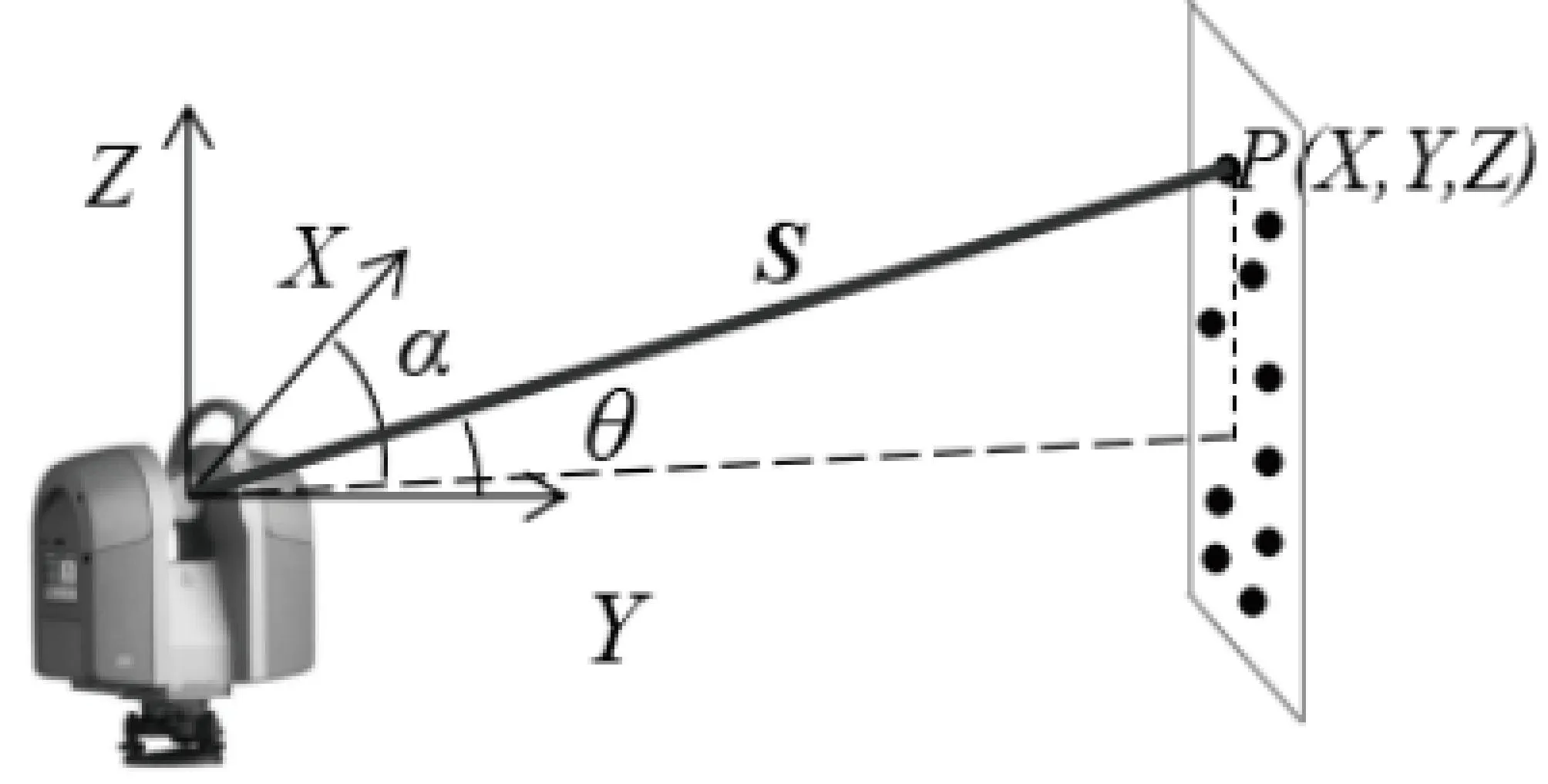
图1 三维激光扫描测量点坐标原理
本项目数据采集设备为Geo-SLAM移动三维激光扫描仪,该款扫描仪便携高效、扫描快速,在有效获取距离30 m左右每秒约能获取4.3万个点云数据,同时通过同步定位和制图可以自动进行数据配准获取目标实体的三维点云数据。
1.2 不规则实体表面积计算原理
不规则实体表面积计算原理一般是将目标物体的表面划分为多个三角形或四边形,然后计算每个三角形或四边形的面积,并将所有三角形或四边形的面积相加得到总表面积。但是由于三维激光扫描技术获取的数据为离散点云数据,因此还需对点云数据进行拟合,才可进行表面积计算。假设目标表面对应的平面投影区域为Ω,则其可表达为:z=f(x,y),(x,y)∈Ω,将平面区域Ω分割为若干个正方形网格Ωi,j,其中i=0,1,…,N,j=0,1,…,M,网格对应的4个角点坐标分别为:(xi,j,yi,j)(xi,j+d,yi,j)(xi,j,yi,j+d)(xi,j+d,yi,j+d),其中,xi+1=xi+d,(i=0,1,…,N),yi+1=yi+d,(j=0,1,…,M),d为网格大小,网格4个角点对应的曲面z值分别为zi,j,zi+1,j,zi,j+1,zi+1,j+1,则可构造双线性插值函数如公式(1)所示[6]:
z=(1-u)(1-v)zi,j+u(1-v)zi+1,j+(1-u)vzi,j+1+uvzi+1,j+1
(1)

(2)
2 工程应用
2.1 工程概况
实验验证对象为某城市广场的异形雕塑,应甲方要求对雕塑进行表面积测量,根据制作材料、平方数计算进行工程造价结算。经实地踏勘,发现雕塑均由不规则曲面构成,结构较为复杂,为垂直相交“半圆形飞碟”,“飞碟”边缘为弧形实体,中间为镂空构造,整体结构如图2所示。为快速准确地获得工程成果,采用移动式三维激光扫描技术进行测量。与表面积测定仪和全站仪免棱镜2种常用的传统测量方法进行比较,验证这几种方法在精度和效率方面的差异。

图2 雕塑设计实景及主要采集设备
项目整体工作流程主要包括技术路线规划、点云数据采集、点云数据预处理以及三维建模及面积核算4部分。其中路线规划主要是扫描方案技术设计;点云数据采集主要是应用扫描仪外业获取点云数据;点云数据预处理主要是对点云数据进行拼接、去噪和精简处理等;三维建模及面积核算主要是对预处理后的点云数据进行三维建模、多边形编辑和面积计算。具体工作流程如图3所示。

图3 项目工作流程
2.2 外业数据采集
目标雕塑曲面构造复杂,传统的地面式扫描仪在数据采集时会因为视角原因产生较多点云数据缺失,因此本项目选择手持式移动三维激光扫描仪,激光扫描精度约为2 cm,数据扫描过程中,一边扫描一边观察数据完整性。为保证目标实体顶部和镂空内部数据采集的完整性,本项目还借助了BLK360三脚架,通过升降脚架将扫描仪架至理想高度,增加扫描仪扫描视角,待数据扫描完成反复检查无缺失时结束扫描工作。
在扫描前,工作人员需要对异形目标的形状和表面特征进行了解,以便调整扫描仪的扫描角度和距离,从而获得更好的扫描效果。本项目将目标异形雕塑划分为3个区域:扇形外边缘区域、扇形镂空区域和弧形立柱。首先,将Geo-SLAM设备安装在BLK360三脚架,并确保设备传感器连接良好;其次,启动Geo-SLAM软件,打开相应的扫描仪配置文件,并确保设备能够与软件成功连接;再次,按照预定的扫描路线和采集范围,使用扫描仪进行扫描,并通过软件实时查看回传的图像和点云数据,以确保扫描质量;最后,将后处理后的点云数据导出为LAS格式备用。
2.3 点云数据预处理
点云数据预处理包括数据拼接、数据去噪和数据抽稀。数据拼接是将不同项目工程扫描数据进行合并;数据去噪主要是“删减”非目标实体点云数据,降低表面积测算误差;数据抽稀是考虑到后期需要拟合建模操作,点云数据量大,增加后期工作量,因此对目标实体点云数据压缩。预处理后的点云数据如图4所示。
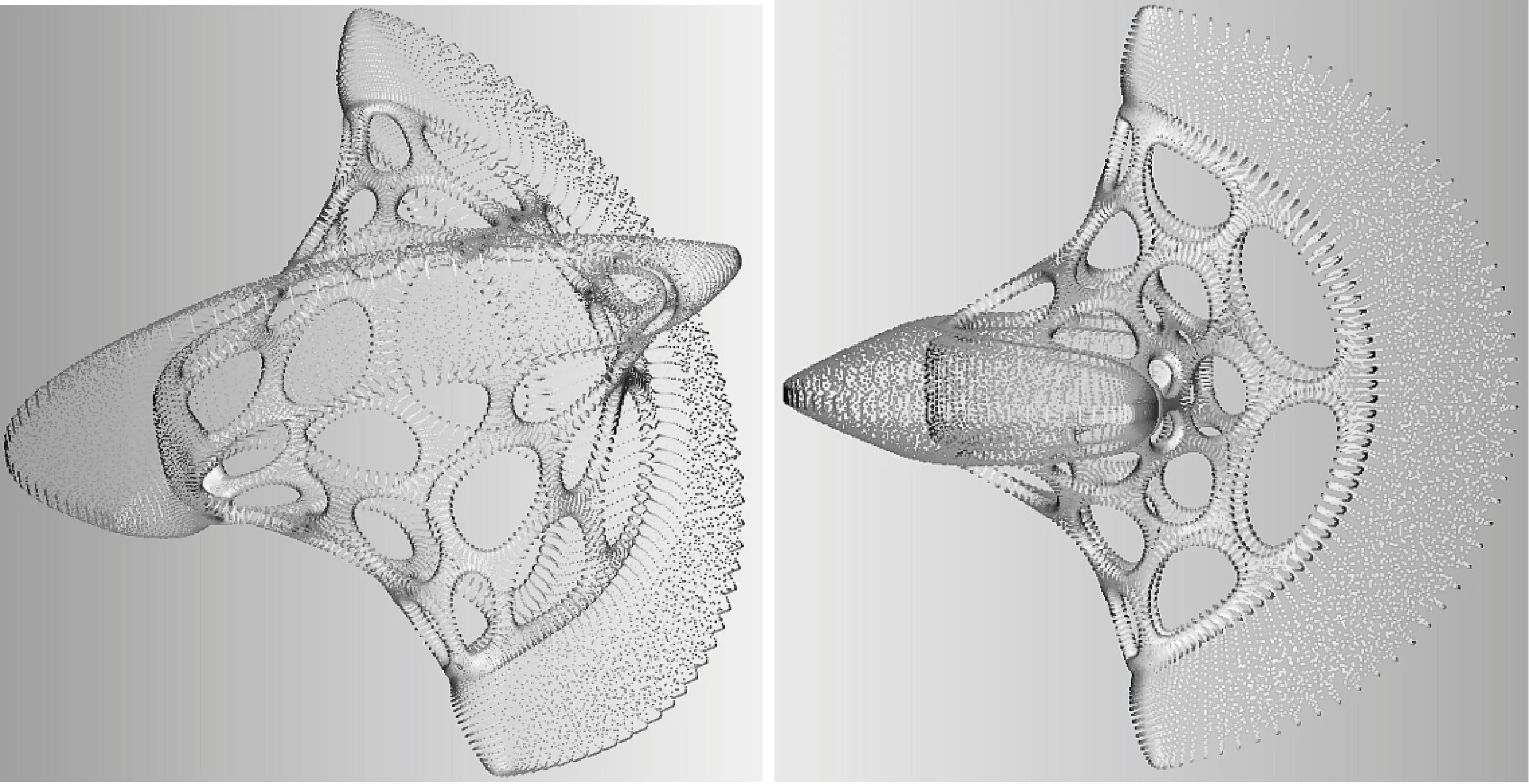
图4 预处理后的雕塑点云数据
2.4 点云拟合和表面积计算
异形雕塑三维建模主要使用Geomagic Studio软件。首先,将雕塑点云数据导入建模软件;其次,对导入的点云数据进行预处理,以去除噪声点和离群点等非必要目标数据;最后,选择Geomagic Studio的曲面拟合工具,选择软件“封装”功能,将点云数据拟合成光滑的曲面模型,生成Delaunay三角网。表面积计算主要针对封闭模型,因此还需将拟合后的曲面模型转换为网格模型,并对模型进行空洞修补、去除钉状物等优化处理。最终拟合的雕塑三维模型如图5所示[7]。

图5 雕塑三维模型
为提高目标实体表面模型与实际的一致性,需要对拟合后的三维模型进行孔洞填补、删除钉状物和平滑模型表面等操作。计算目标实体表面积时,应用Geomagic Studio 软件多边形分析工具里的“计算面积”“曲面面积”功能计算其表面积,得到目标实体的表面积为23.15 m2,体积为7.18 m3。
3 精度分析
表面积测定仪通过接触雕塑来获取目标物的表面积数据,而全站仪免棱镜法则是将目标物上的特征点导入相关软件进行表面积计算。这2种方法在测量过程和数据处理方式上有所不同,实验对比结果如表1所示[8]。
传统测量方式测量结果存在很多不确定性,因此取表面积测定仪和全站仪结果的平均值为真值。从表1可以看出,三维激光扫描仪获取的表面积与传统的测量方式相比,精度相对误差接近6%,精度较高。数据分析结果表明,表面积测定仪和全站仪测量结果均小于扫描仪测量结果,主要原因是2种作业方式外业数据采集不全,导致结果偏小。
从效率上来看,表面积测定仪花费时间最多,主要原因是该技术应用于能直接接触的小体积待测目标,而本次目标体积偏大,为保证数据精确性,需要架梯多视角进行精细采集,效率偏低;其次是全站仪免棱镜法,外业需要多测架站;而三维激光扫描作业效率最高、优势明显。但是,小型异形目标实体且可接触测量时,表面积测定仪作业效率接近扫描仪法。
4 结语
异形建筑表面积测算对于进一步了解建筑设计规格、材料成本、施工难度和维护成本,在建筑业的规划、设计、施工、维护和评估等各个领域都有着重要应用。本文以某异形雕塑表面积测量为工程案例,通过实验验证,得出三维激光扫描技术的精度较传统方法具有更高置信度和效率。研究结果可为今后异形建筑物表面积计算提供一种全新的方法。
