基于人工微干预的自动化船闸运行控制方法分析
2024-03-20黄有榆
黄有榆
(广西西江开发投资集团有限公司船闸运营管理分公司,广西南宁 530000)
0 引言
内河货运是我国货物运输的主要方式之一,具有成本低、运量大的优势。随着生产力水平的提升,内河货运量逐步增加,为进一步提升船闸运行安全性与效率,需要强化对船闸集控系统的信息化控制,以满足管理需求。基于此,对基于人工微干预的自动化船闸运行控制方法进行分析。
1 船闸运行异常情况分析
1.1 人员操作异常
人员操作异常主要为人员对船的控制方式不合理,导致出现危险情况。比如,在船舶进入船闸的过程中没有及时调整方向或减速,造成船舶和闸门相撞。此外,船舶停靠位置不合理也可能对船闸的正常运行造成影响,如导致船舶阻碍闸门的开闭[1]。
1.2 设备运行异常
如果船舶或者船闸出现动力故障,会影响船闸的正常运转。船舶故障主要是由于船的动力系统出现问题,导致船舶无法正常控制或失去动力,从而使船舶难以到达指定位置,阻碍闸门正常开闭。船闸动力故障主要是闸门开启和关闭故障,如闸门不响应、开闭系统在运行过程中突然停机、两侧闸门的开关动作不同步等。
2 三维动态风险管理
2.1 管理系统设计
2.1.1 设计目标
建立可视化、信息化的船闸风险管理平台,利用三维可视化技术确定船闸周边情况,对风险进行综合分析,确定整个船闸系统的动态状况并进行风险预警。要实现上述目标应建立船闸区域三维数字模型,船闸主体模型,实现三维动态全视景场景管理及可视化分析;结合现场情况进行船闸变形预报,实现船闸监测点预警闪烁;对安全风险进行综合判断,确定风险值的区间和风险等级;结合风险等级分析结果,输出决策策略[2]。
2.1.2 功能要求
基于船闸的特殊需要及河流的特点,很多船闸设置在比较险要的环境中,运行过程中存在较多风险因素。船闸风险预测模型需要提升船闸系统对船舶、船闸状态的感知能力,实现对风险的实时预测和分析。要实现对船闸的三维动态风险管理,需要构建船闸区域的全方位视觉场景,以便于预测船闸的状态以及进行风险综合预报,有效降低风险管理难度,保证对船闸运行状态的高效控制,降低风险事故发生率[3]。
2.1.3 系统框架
使用机器学习算法、GIS 可视化仿真技术等,实现船闸三维动态风险管理系统框架的搭建。该系统需要具备周围船闸建筑、船闸运行、主要监测点查询功能,以满足现场全场景仿真需求,在实际运行中,能够使用各种数据,实现对各类信息的动态展示,如监测点的空间信息、实测数据等。通过综合风险预警功能,该系统能够实现对风险权重的动态显示,从而为船闸的管理决策提供有力支持。船闸三维动态风险管理系统框架如图1 所示。

图1 船闸三维动态风险管理系统框架
船闸三维动态全视景仿真子系统:使用GIS 系统建立当地3D 数字模型,可以展示船闸结构和附属建筑物状况,实现对地貌的多角度展示,且能对水文环境和船闸建筑物进行全视景展示[4]。
建立具有综合风险管理的子系统,利用智能技术对船闸的风险状况进行实时分析,进行各类问题预测,并根据不同状况评价风险等级、输出控制策略,方便控制人员针对实际情况进行分析。例如,通过对当地场景的三维分析,进行船闸日常运行过程中的风险预警,系统自带的智能算法也能帮助管理人员分析各种风险的产生原因,并给出控制建议,为管理人员提供更具价值的决策支持,便于实现人工微干预管理。
2.2 船闸综合风险预警
2.2.1 PSO-BP 神经网络算法
根据船闸风险警报需求,使用BP 技术和PSO 建立船闸风险预测模型,并根据现场情况分析风险,得到风险分析结果。由于导致船闸出现风险的因素较多,所以需要使用主成分分析法实现数据降维处理[5]。主成分分析法是一种无监督线性降维方法,可以从多个指标中找出最关键的指标进行分析,在优化模型的同时也能避免信息损失。
在实际分析中,以xi作为样本点,WTxi为样本点在超平面中的映射,其中W=(W1,W2,…,Wd),为了实现样本方差的最大化,所有样本点需要尽量分开,之后得到样本点的方差为其中是协方差矩阵,优化目标函数可以写成:
使用传统BP 神经网络时,能够利用局部搜索优化机制处理复杂非线性问题,网络在学习过程中会调整神经元的权重,达到搜索最优解的目的。但该方法的问题在于,学习过程中网络可能出现局部极值的问题,影响网络的正常训练,导致BP 神经网络的稳定性下降。为了提升网络的应用效果,该研究中引入PSO算法进行BP 神经网络优化,结合BP 神经网络对初始权重敏感的特点,利用PSO 算法帮助BP 神经网络确定最合适的初始权重,提升神经网络的泛用能力。使用PSO 进行BP 网络优化时,会将BP 神经网络全部连接权值视为粒子群位置向量,之后通过位置向量进行寻优,以MSE 为标准获得最小目标数量,获得BP 神经网络的连接权值和阈值。PSO-BP 神经网络算法流程如图2 所示。
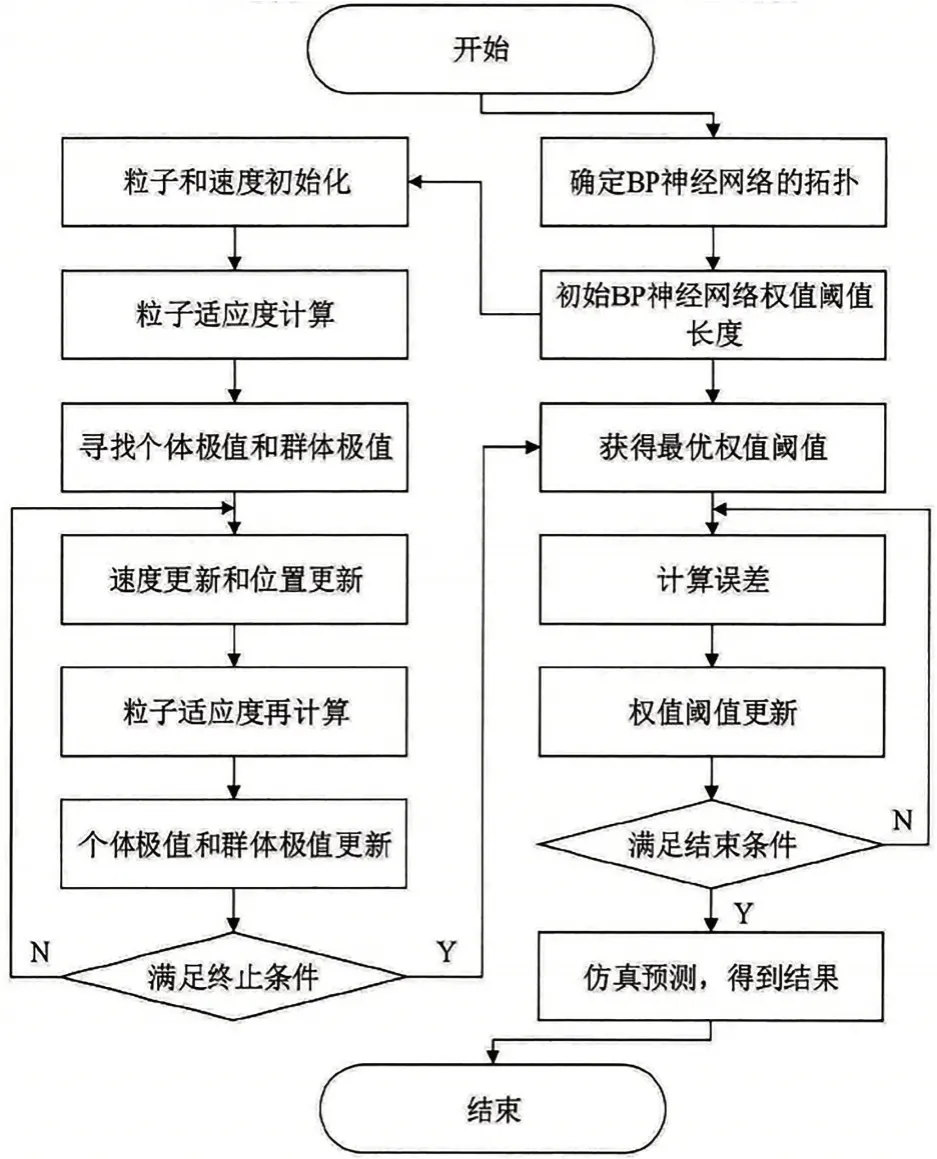
图2 PSO-BP 神经网络算法流程
2.2.2 基于PSO-BP 的船闸综合风险预测
进行船闸风险数据预处理时,根据专家评价进行某船闸的风险因素评价,得到风险评价表后进行数据归一化处理。使用试算法确定参数,并展开对比,综合考虑粒子群算法和BP 神经网络模型,粒子群的粒子数量为100,最大迭代次数为800 次,惯性权重为0.3,学习因子c1和c2都为0.5,最大速度为vmax=3。对于BP 网络,使用三层前馈网络结构,输入神经元的数量为5 个,隐含神经元数量为11 个,输出为0~1 的数值,输出层神经元为1 个,构建结构为5-11-1 的神经网络。
在分析过程中,通过分析监测点的数据,能够对船闸、船舶是否存在风险进行分析,将监测获得的相关数据输入模型,即可完成对船闸的风险预测,以及对风险的评价工作,针对危险因素提供示警,并告知原因[6]。
2.2.3 船闸场景漫游和可视化
利用系统属性数据库和空间数据库的实时连接,构成整体运行框架,可以构建三维地形等模型,同时可以完成视景之间的融合。利用GIS 系统能满足调整视角的需求,方便浏览不同位置,并进行定位和平移,满足风险管理过程中浏览高风险位置的需求。
2.2.4 针对船闸开闭的监测和预警
在船闸上设置监测点,三维风险控制系统能够通过监测点确定船闸的控制键位置信息,进行实时监测并自动统计数据变化,实现动态监测。船舶通过时,系统会根据实时数据生成船闸开闭动画,使管理人员能够把握监测点的变化。系统能够显示各个监测点位置变化曲线图,方便管理人员确定闸门的变化状况,系统也能自动完成对闸门开闭变形状况的分析,分析闸门整体是否存在变形问题,为后续的风险分析提供数据支持[7]。
3 人工微干预自动化船闸运行技术条件
3.1 自动关闭上游闸门条件
进行上游闸门关闭控制时,系统首先会分析上游闸门的互锁条件,并检查闸门中的船舶数量,之后由管理人员进行现场检查,确定船舶和船闸的安全性,并观察周围是否存在影响行船秩序的船舶和危险物体,并进行船闸身份信号验证。
系统运行时,使用三维动态风险控制系统进行船舶进闸数据采集,将采集结果和智能调度相关信息系统关联;利用视频、激光测距仪等进行检测,确定是否有物体或者船舶接近,如果发现风险信号,自动控制系统会控制闸门停止运行,由人工检查确定现场是否存在危险,危险解除后闸门才开始运转。船舶运行过程中,现场的感知设备会确定船舶信号,并使用智能系统进行调度,检查船舶信息是否匹配。由于不匹配情况具有偶发性,所以不建议船舶进闸身份识别参与系统控制工作,可作为自动提醒功能[8]。此外,上闸首人员安全监测和船舶安全监测所使用的三维系统需要在同一个控制网络,并通过监测结果控制闸门。
3.2 自动打开下游阀门条件
分析是否打开下游阀门时,需要确定船闸是否存在越限问题,且要对闸首船舶的安全性进行验证,检查闸门阀门关闭情况,验证过程中任一项目存在异常系统都会向周围的管理人员发出警告,并控制船闸停止运行。此外,要进行闸室内船舶位置、船舶系缆情况检查,确定系缆情况满足要求后,开始运行打开下游阀门的程序。在提阀的过程中,如果检测到浮式船柱卡阻,则需要语音播报,且现场需要强落阀门。
3.3 自动打开下游闸门条件
由于人字门需要在无水头差的情况下运行,所以对闸室内外水位信号差的检测非常重要。然而,由于存在超泄现象,反向水头可能会推开人字门,导致室内外水位差信号的自动采集无法满足水平信号差值,这种情况下可采取人工微干预水平信号,满足开闸门条件。
4 结语
船舶通过船闸会经过复杂的过程,影响安全的因素较多,为了确保船舶安全通过船闸,需要借助智能化的控制方法实现对现场风险的综合性感知。基于人工微干预的自动化船闸运行控制方法在提高船闸运行效率、降低能耗、减少人力成本、增强安全性等方面具有显著优势。相信随着科技的不断进步和人工智能技术的日益成熟,这种方法会实现更为精准、高效、安全的船闸运行控制。