基于滑模自适应迭代学习的四旋翼无人机轨迹跟踪
2024-03-19赵成璟董升昊
王 娟, 赵成璟, 董升昊
(沈阳建筑大学电气与控制工程学院,沈阳 110000)
0 引言
迭代学习控制是一个具有较低模型依赖、较强鲁棒性以及较高控制精度等特性的控制方法,一些研究人员考虑将迭代学习应用于四旋翼无人机飞行控制方面,其中,基于迭代学习控制的四旋翼无人机轨迹跟踪控制吸引了很多研究人员的兴趣。
迭代学习有很多应用场景,如机器人控制[1]、自动驾驶控制[2]和船用起重控制[3]等。迭代学习目前的研究存在一些问题,其中之一是在非参数情况下处理系统的不确定性,而在一般情况下系统的非参数是可以满足假设的,当假设不成立时,传统的迭代学习无法满足系统的控制要求[4]。文献[5]针对观测器增益的自适应整定问题,设计了一种自适应ADRC姿态控制器,其整定过程是通过迭代学习控制在线优化抗干扰控制器的带宽;文献[6]使用数据控制的方法,实现无人机的高性能轨迹跟踪,引入一种平滑器来估计重复的干扰,此估计器必须依赖于PBSID算法的黑箱识别获得精确的系统模型;文献[7]使用滑模控制与迭代学习相结合来解决在四旋翼无人机轨迹跟踪中出现的不确定性和外部扰动问题,把迭代学习集成在受控系统,在离散时域中不需要干扰的先验信息,以迭代学习与滑模控制来保持系统的鲁棒性;文献[8]将模糊PID控制与迭代学习相结合,它结合了对扰动系统的鲁棒性和迭代学习控制的不确定性,用模糊控制来设置PID中的3个学习增益矩阵,来抑制不确定因素对无人机的扰动;文献[9]在考虑外界干扰的情况下,设计了一种最优迭代学习的干扰控制器,此干扰控制器使用离散形式对未知干扰进行估计,从而使四旋翼无人机的轨迹跟踪渐近收敛;文献[10]从频域的角度考虑四旋翼无人机轨迹跟踪问题,设计最优学习滤波器和鲁棒滤波器来对两步优化问题进行求解,所设计的迭代学习控制器作为已有基线控制器的附加控制器,可以进一步提高跟踪性能。一些研究人员为了摒除传统控制的缺点,使用了滑模控制[11-14]。滑模控制本质上是一种特殊的非线性控制,可以在动态过程中根据系统的偏差或者导数等不断变化,使系统按照期望轨迹运动。
本文在考虑外部扰动因素的情况下,提出一种滑模自适应迭代学习的四旋翼无人机轨迹跟踪控制算法。与现有的研究相比,本文所提出的控制算法能够减少迭代次数,降低计算量,同时具有较高的跟踪精度,其特点如下:四旋翼无人机轨迹跟踪反馈控制器使用的是滑模控制器;使用迭代学习作为无人机系统的前馈控制器;在迭代学习过程中可以根据轨迹跟踪误差自适应改变迭代学习中的控制增益。
1 问题描述
在建立四旋翼无人机模型之前,本文先做如下假设[15]:1) 四旋翼无人机是一个刚体系统,在启动至降落后不存在弹性形变;2) 机体坐标的中心原点为四旋翼无人机质心,也就是无人机为完全对称;3) 忽略空气阻力的影响。
对于四旋翼无人机的模型的建立,在考虑外部扰动的情况下,使用DCM[15]旋转矩阵并通过Newton-Euler[16]方程可得到

(1)

四旋翼无人机的控制输入为
(2)
式中,Fi和Mi(i=1,2,3,4)分别表示4个旋翼产生的拉力和4个转子产生的阻力矩,均为标量。
将式(1)以状态方程的方式呈现为
(3)
式中:f为非线性函数矩阵;B为时变增益矩阵;D为扰动矩阵;c1为4×12的输出矩阵,矩阵c1对应的元素c1(1,3)、c1(2,4)、c1(3,5)和c1(4,6)等于1,其余元素为0。
控制目标:设计滑模控制算法作为反馈控制器的目的是计算系统输入,同时设计自适应迭代学习算法作为前馈控制器,目的是缩减跟踪误差,从而实现对无人机系统的轨迹跟踪。
2 控制方案
本文采用迭代学习控制,第k次迭代时的状态方程可写成
(4)
定义第k次迭代轨迹跟踪的误差为
(5)
式中:c2为4×12的矩阵,c2(1,9)、c2(2,10)、c2(3,11)和c2(4,12)等于1,其余元素为0。
首先设计滑模控制器,滑模面控制函数设计为
(6)
式中,α>0。选取Lyapunov函数为
(7)
(8)
滑模控制中采用幂次趋近律,即
(9)
式中:η>0;0<α<1。若在滑模控制中使用sgn符号函数作为开关函数可能会激发系统的未建模动态,从而引起抖振。为了防止在求解过程中出现抖振现象,本文采用sat饱和函数作为开关函数,sat函数的作用是在控制输入出现偏离滑模面时,通过抑制控制信号的增长速度来防止系统失控,sat的表达式如下
(10)
式中,Δ为边界层。
根据式(1)和式(7)~(10)可以解出
(11)

将式(11)简化成
(12)
式中,S′k为滑模趋近率矩阵。为了让无人机在迭代过程中能够快速地收敛达到预期的跟踪效果,使用自适应迭代学习算法来降低迭代次数,即
(13)

tanh(a)=μ·(ea-e-a)/(ea+e-a)。
(14)
由于tanh(a)的值域为[-μ,μ],μ为一正常数,从而可以改变了PD型[17]控制增益的倍数,加快了四旋翼无人机轨迹跟踪的收敛速度。
综上设计如下的滑模自适应迭代学习控制器
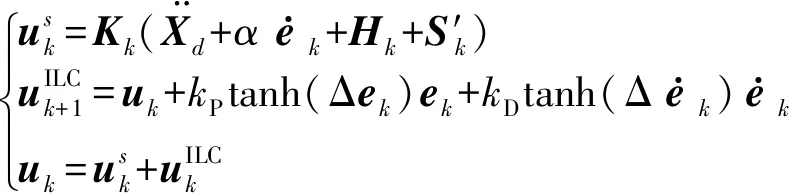
(15)
式中,uk为滑模自适应迭代学习控制器第k次的控制输入。
3 原理分析
定理1对于四旋翼无人机控制系统式(1),采用滑模自适应迭代学习控制方案式(15),对于给定的期望轨迹xd(t),如果满足以下两个条件,则下面结论成立。


结论2 如果初始条件满足Xd(0)=Xk(0),即初始状态无偏移情况下,则状态误差Xd(t)-Xk(t)和输出误差ek(t)在[0,T]上收敛到一个任意小的可调残集内(k→∞)。
证明过程如下。首先考虑控制输入的有界性。记Δuk=ud-uk,ΔXk=Xd-Xk,根据式(4)和式(15)可知
(16)


结合式(16),进一步可以得到
(17)
式中,Wkc1+Lkc2的范数等于bL界。
由式(15)可得

(18)
将式(18)代入式(17)可得到
(19)

由式(4)和式(18)可得
(20)

对式(20)使用Bellman-Gronwall[19]引理可得

(21)
将式(21)代入式(20)可得
(22)
式(22)两端同时乘以e-λt(λ>b3),并利用λ范数定义可得
(23)
式中:β=b1bx0+b1λb3bD;λb3=(1-e(b3-λ)t)/(λ-b3)。
由于ρ<1,所以选取足够大的λ,可以使λb3足够小,则ρ+b1bBλb3<1,所以可使X′=α1+b1bBλb3+ρ<1得
(24)
式(21)两端取λ范数,可得
(25)

(26)
由式(17)和式(26)可得
(27)


4 仿真实验及分析
为了检验本文设计的滑模自适应迭代学习算法对于四旋翼无人机飞行器的轨迹跟踪和在未知扰动的情况下的鲁棒性,通过仿真实验结果与四旋翼无人机期望轨迹跟踪控制结果作对比来验证本文设计的控制算法。式(1)中四旋翼无人机系统的各项参数为:重力加速度为9.8 m/s2;机体质量为0.8 kg;四旋翼机臂长度为0.12 m;x轴的转动惯量为0.04212 kg·m2;y轴的转动惯量为0.04212 kg·m2;z轴的转动惯量为0.08255 kg·m2,迭代算法中的kP为0.1,kD为10,tanh(a)中的μ为1。为了模拟外界风干扰,本文为四旋翼无人机添加的扰动:d=10+20sin(2πt),z轴的扰动分量dz=0.1d,滚转角扰动分量dφ=0.15d,俯仰角扰动分量dθ=0.15d,偏航角扰动分量dγ=0.1d。
为了四旋翼无人机轨迹的平滑,采用连续的位置、速度和加速度,参考轨迹如下
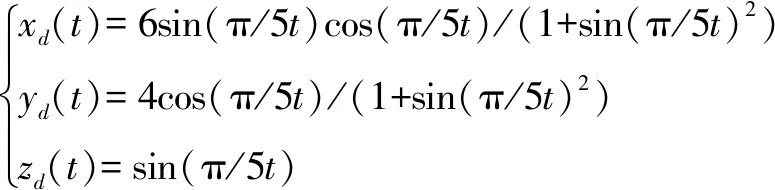
(28)
由于四旋翼无人机是一个欠驱动系统,如果想要使x和y位置稳定,需要通过控制姿态角来实现,将期望偏航角设为0°,然后得到期望滚动角和俯仰角[20]
(29)
图1为在期望、未迭代和第7次迭代后的3D轨迹跟踪对比图。
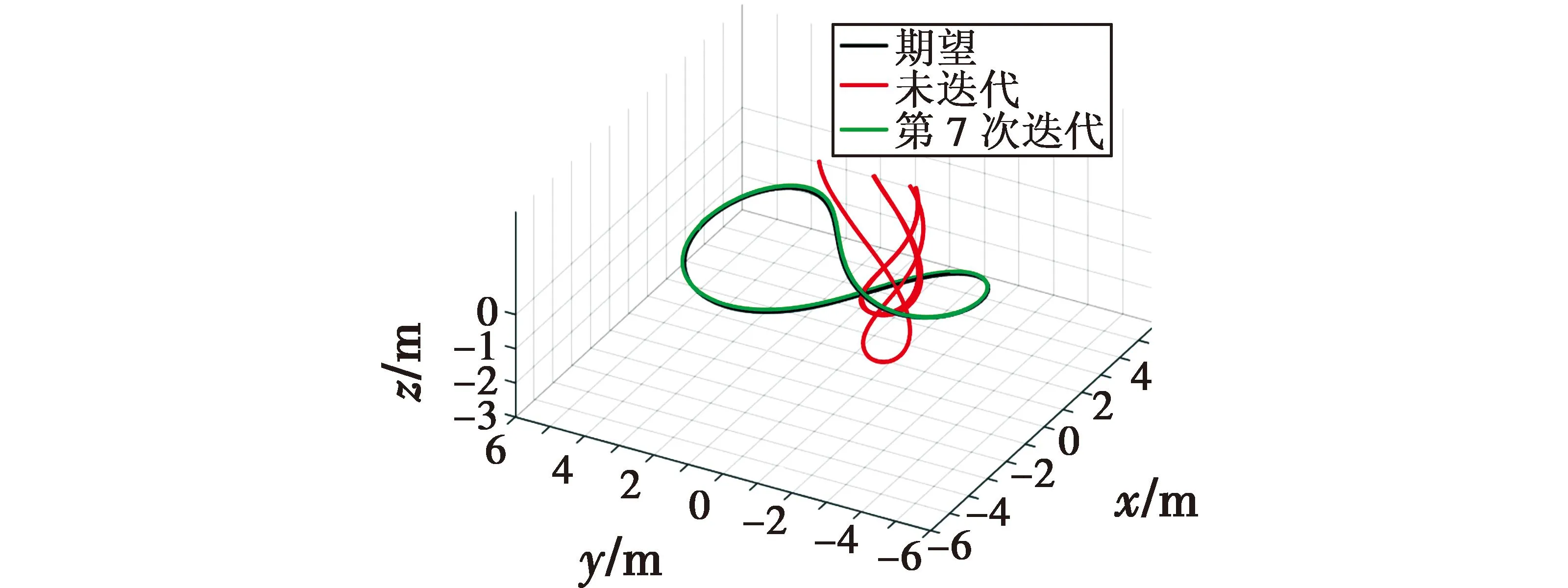
图1 期望、未迭代和第7次迭代后的3D轨迹
图2为四旋翼无人机在z轴、x轴和y轴的期望、未迭代和第3与第7次迭代后的轨迹对比图。
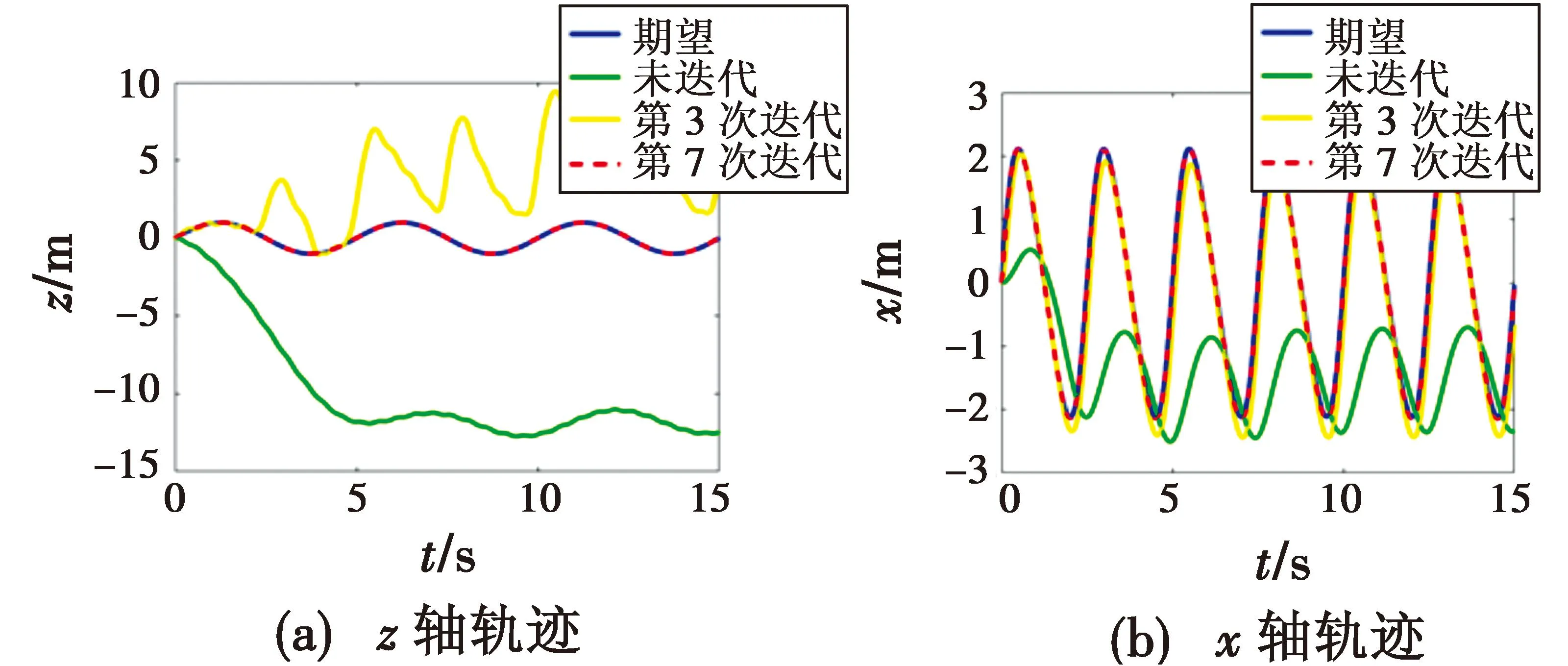
图2 期望、未迭代和第3与第7次迭代后的各轴轨迹
通过图1~2可以看出,使用滑模自适应迭代算法基本完全重合于期望轨迹,证明了该算法在位置跟踪上具有较好的收敛性。
图3分别为四旋翼无人机滚转角、俯仰角和偏航角的期望、未迭代和第3与第7次迭代后的变化规律。
通过图3可以看出,使用滑模自适应迭代算法的姿态几乎与期望姿态重合,证明了本文算法在姿态跟踪上具有较好的收敛性。
5 结束语
本文针对存在外部扰动情况下的四旋翼无人机系统,设计了滑模自适应迭代学习控制算法。滑模子控制器作为反馈控制器,迭代学习子控制器作为前馈控制器,自适应迭代学习算法可以减少迭代次数,降低计算量,同时提高跟踪精度。最后,仿真实验验证了控制算法在四旋翼无人机系统中具有良好的跟踪效果。表明此算法具有可行性和优越性。
