利用编程控制系统开展多路功率电子元器件老炼控制探究
2024-03-19谷元元贾兆旭
谷元元,贾兆旭
(陕西恒太电子科技有限公司,陕西西安,710100)
0 引言
多路功率电子元器件老炼控制是现代工业中一个重要的控制技术[1]。它涉及到实时监测和控制多个功率电子元器件的状态,以达到稳定工作和延长使用寿命的目的。传统的老炼控制方法存在控制精度不高、稳定性差等问题[2~3]。因此,开展对多路功率电子元器件老炼控制的深入研究和改进具有重要意义。本文基于现有的老炼控制方法和算法,结合最新的编程技术,设计了一种新的编程控制系统。该系统可以实时监测多路功率电子元器件的工作状态、电流、温度等参数,并根据实时数据进行快速精确地控制。与传统控制方法相比,该系统具有更高的控制精度和稳定性,可以提高功率电子元器件的老炼效果,延长使用寿命。本文将介绍编程控制系统的设计原理和实现过程,并通过实验验证其在多路功率电子元器件老炼控制中的优势,进一步完善系统设计,扩展适用范围,为工业生产提供更加可靠、高效的老炼控制技术。
1 系统总框架设计
利用编程控制系统开展多路功率电子元器件老炼控制,旨在实现对多个功率电子元器件的精确控制和协调运行,以提高系统性能、效率和稳定性,系统总框架如图1 所示。
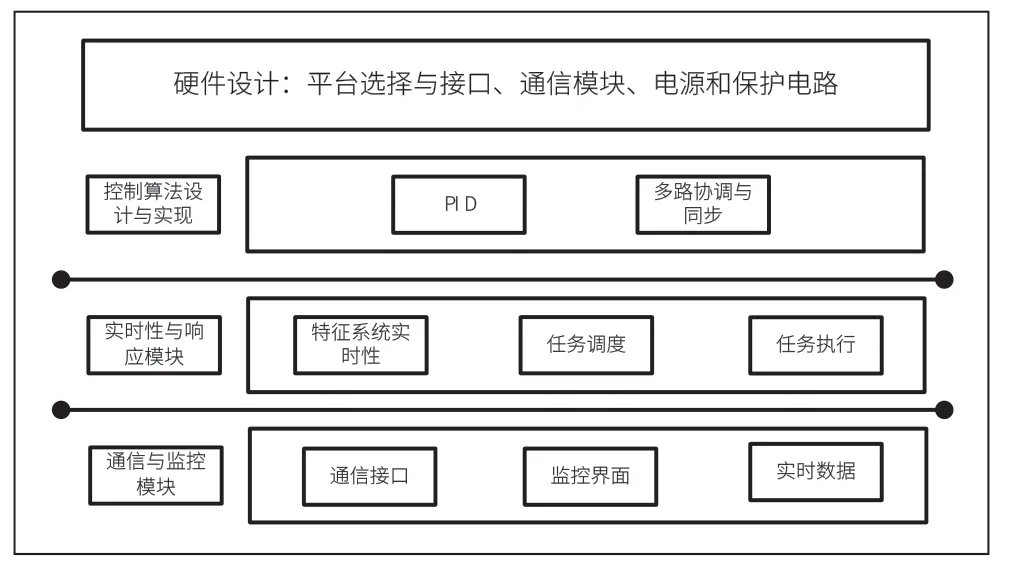
图1 系统总框架设计
硬件设计部分需要考虑和选择适当的微控制器、FPGA等硬件平台,设计元器件接口电路,包括控制信号输入和反馈信号采集。设计通信模块实现与其他系统的数据交换,设计电源电路确保元器件供电稳定,实现电路的过流保护、过温保护。
软件设计部分,则根据PID 控制算法设计控制逻辑,考虑多路之间的协调与同步,避免互相干扰。实时性与响应模块使用中断或多线程编程技术,确保控制系统的实时性,设计任务调度,确保不同任务按时执行。通信与监控模块实现与外部系统的通信接口,如串口通信、以太网通信等;设计监控界面,用于显示元器件状态、实时数据和故障信息。
2 系统硬件设计
在基于多路功率电子元器件老炼控制的编程控制系统硬件设计部分,采用STM32F7 微控制器,以及Xilinx Artix-7FPGA(现场可编程门阵列)平台,具体情况如图2 所示。
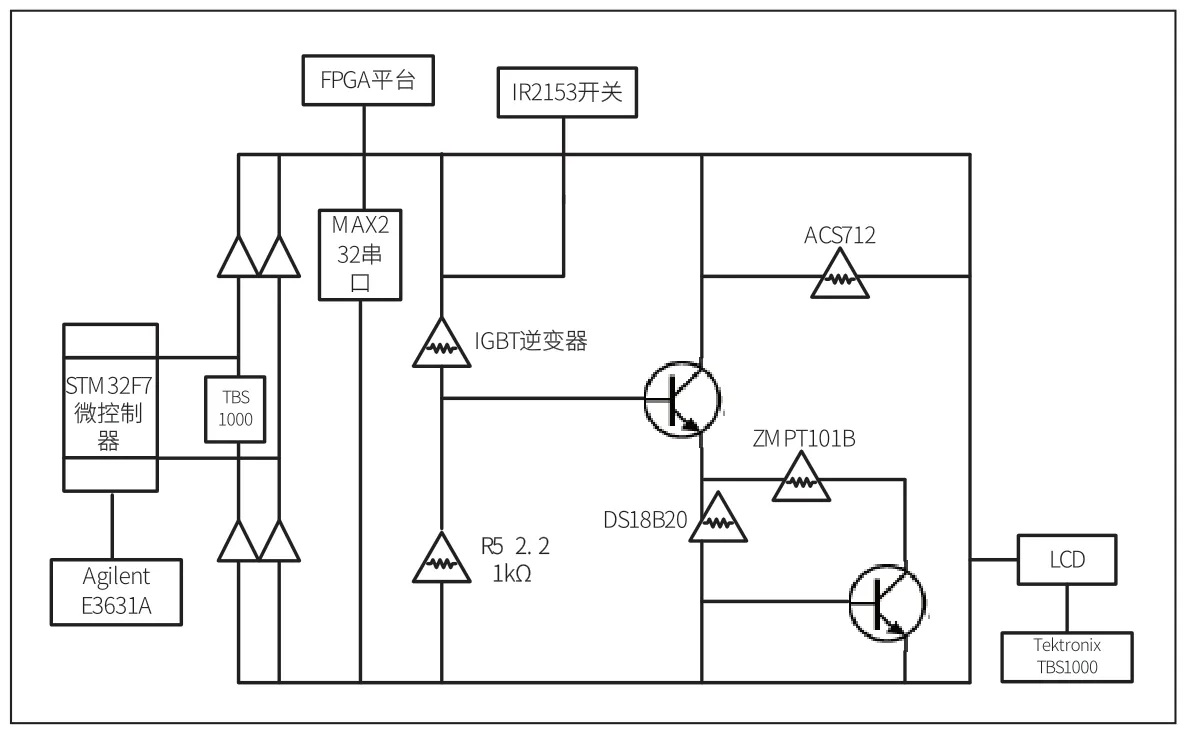
图2 电路拓扑图
功率电子元器件会用到IR2153 开关电源控制芯片以及IGBT 逆变器,串口型号为MAX232,使用ENC28J60以太网,与STM32F7 微控制器连接,以实现数据的网络传输。ACS712 电流传感器、ZMPT101B 电压传感器以及DS18B20 数字温度传感器用来传递实时数据,监测电子元器件老炼控制情况。LM7805 电源稳压芯片用于5V 稳压,16x2 字符LCD 显示,以及Resistive Touch Screen 触摸屏用于监控设备的显示。电源供应中,采用Agilent E3631A直流电源,Tektronix TBS1000 系列示波器,外壳需要做到保护电路免受外界环境影响,散热器用于功率较大的逆变器元器件,以防止高温导致的各种问题。
3 系统软件设计
■3.1 PID 控制与协调模块
在基于多路功率电子元器件老炼控制的编程控制系统中,PID 控制与协调模块的主要功能是实现对多个功率电子元件的精确控制和协调运行,以提高系统的性能、效率和稳定性,具体的运行流程如图3 所示。
设置目标值和反馈信号,首先需要确定被控制目标值(设定点),采集传感器给予的实际反馈电流、电压和温度信号。之后计算误差,以目标值与反馈信号的差为具体的误差情况,以此推算PID 输出。PID 输出主要由比例项(P 项)、积分项(I 项)、微分项(D 项)三部分组成,在计算比例项P 时,具体的计算公式如式(1)所示:
其中,Kp是比例系数,O 是误差。积分项I 项的计算公式如式(2)所示:
其中,Ki是积分增益,代表对误差的积分,dt 表示积分的变量是时间。微分项D 的计算公式如式(3)所示:
其中,Kd是微分系数。PID 输出则由比例项(P 项)、积分项(I 项)、微分项(D 项)的总和构成,根据PID 输出生成控制信号,以此控制功率电子元件。如果存在多个功率电子元件,便需要执行协调控制策略,确保多路之间的协调和同步。系统通过CAN 通信协议让各个元件相互通信、共享信息,以此来传递状态和控制情况,让各元件可以协调操作,确保不会产生冲突。以便使用实时编程技术,确保控制模块的实时性和快速响应。
■3.2 实时性与响应模块
实时编程技术的有效使用是确保控制模块实时性和快速响应的关键,特别是在多路功率电子元器件的老炼控制系统中[4]。在该模块中首先需要确定系统的实时性需求,包括任务的响应时间、任务优先级、最大允许的延迟等,根据需求分析,将系统功能划分为不同的任务,为每个任务分配合适的优先级,具体划分情况如表1 所示。

表1 任务的响应时间和最大允许的延迟
设计并实现中断服务程序(ISR)处理紧急事件,如高优先级任务、硬件故障等,设置中断优先级,确保高优先级中断能够快速响应。根据任务的优先级和时序要求,合理安排任务的执行顺序,使用实时操作系统(RTOS)来管理任务调度[5]。在调度前编写任务的代码,确保代码逻辑简洁、高效,具体如下操作:
(1)将任务分解为较小的子任务。
(2)对每个子任务估算所需的执行时间,确保能够在规定的时间内完成。
(3)避免使用长时间的延时操作,特别是在高优先级任务中,需使用短延时或定时器中断来实现定时操作。
(4)避免在任务中使用无限循环,除非在任务的设计中确实需要。
(5)将耗时的操作设计为异步操作,使任务在等待操作完成时继续执行其他操作。
(6)使用非阻塞的方式执行操作,确保任务在执行期间能够进行上下文切换,而不会被阻塞。
(7)根据任务的紧急程度和重要性,为任务分配合适的优先级,确保高优先级任务能够及时响应。
(8)使用硬件定时器来触发任务的执行,以确保任务按照预定的时间进行。
(9)如果任务的执行时间超过了可接受的范围,将任务分为多个步骤,在不同的时间段内执行。
使用信号量同步机制,确保多个任务之间的数据共享是安全和有序的[6]。实时性监测任务的执行时间、延迟等参数,找出性能瓶颈和改进空间,根据监测结果进行优化,调整任务的执行逻辑和调度策略。
■3.3 通信与监控模块
通信与监控模块在系统软件设计中起到了关键作用,用于与外部设备通信、采集数据以及监控系统状态。通信接口设置为串口以及以太网接口,通信接口的硬件参数配置IP地址,选择Modbus 通信协议,根据通信协议规范进行数据交换和通信,通过传感器采集电流、电压、温度等数据,对采集到的数据进行模数转换以及数据处理,模数转换公式如式(4)所示:
其中,AnalogValue是模拟信号值,Vref 是参考电压,Resolution 是ADC(模数转换器)的分辨率。将采集到的数据封装成通信协议规定的格式,发送给外部设备或主机;接收来自外部设备或主机的命令或数据,进行解析并处理。系统要监控各个关键参数,根据监控数据,判断系统是否正常运行,是否存在异常情况。如果系统状态异常,触发报警机制,发送报警信息给相关人员或设备;反馈系统状态信息给外部设备或主机,以实现远程监控和控制。
4 对比实验
■4.1 实验准备
为对比传统控制方法和新的编程控制系统在电子元器件老炼过程中的性能差异,实验以温度控制为例,挑选某电炉进行测试,DS18B20 数字温度传感器用于测量炉内温度,串口型号为MAX232,以太网型号为ENC28J60,电源稳压芯片选择LM7805 型号,电源供应采用Agilent E3631A 直流电源,Tektronix TBS1000 系列示波器。分别选择传统PID 控制器和自编程控制系统,在相同的工作条件下进行一系列试验,记录系统性能。
■4.2 实验结果
实验结果记录中,稳定性评价为记录温度波动情况;控制精度评价是指记录实际温度与目标温度之间的偏差;响应时间评价是记录系统对温度变化的响应时间,具体数据记录如表2 所示。
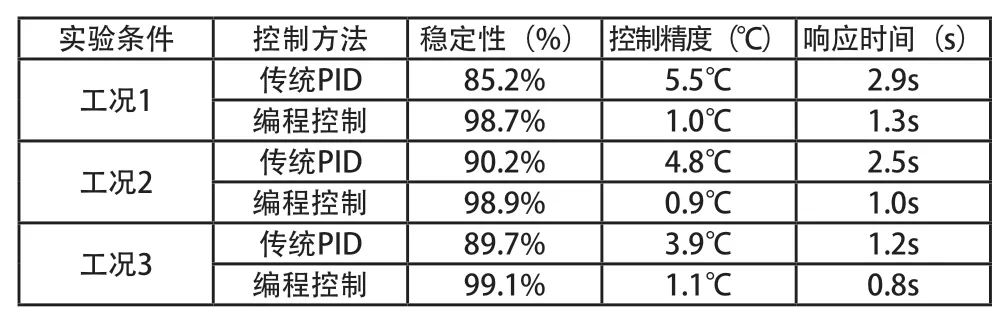
表2 实验结果表
综合分析表2 中的数据,编程控制系统在所有工况下都表现出更高的稳定性、更好的控制精度和更快的响应时间,最快可达0.8s。传统PID 控制方法在某些情况下也能够实现较好的性能,但在多数工况下,编程控制系统的性能更为优越,控制精度误差在0.9℃,准确率最高为99.1%,系统运行顺畅,表明编程控制系统对于多路功率电子元器件老炼控制具有重要的应用价值。
5 结束语
综上所述,本文针对多路功率电子元器件老炼控制问题,利用编程控制系统进行了深入探究,进行PID 控制与协调,建立系统实时性与响应模块以及通信与监控模块。通过实验验证,新的编程控制系统在控制精度、稳定性和灵活性方面均优于传统控制方法。未来,可以进一步完善编程控制系统的设计和算法,以提升系统的性能和稳定性。同时,研究中结合新的技术和方法,拓展控制系统的适用范围,可以为多路功率电子元器件老炼控制提供更加可靠、高效的解决方案。