基于激光雷达的武器导弹目标识别与跟踪
2024-03-18崔焱历王小飞唐克
崔焱历,王小飞,唐克
(抚东机械厂,辽宁 抚顺 113105)
随着现代战争的发展,武器导弹的作用越来越重要。在导弹攻击中,目标识别与跟踪是至关重要的环节。传统的目标识别与跟踪方法主要依赖雷达、红外、光学等传感器,但这些传感器在复杂环境下的性能会受到很大的限制。而激光雷达作为一种新型的传感器,具有高精度、高分辨率、强抗干扰等优点,因此,在目标识别与跟踪中具有广泛的应用前景。
1 激光雷达技术概述
1.1 激光雷达原理
激光雷达是一种利用激光束进行测距的仪器。其原理是利用激光束在空气中传播时的特性,通过测量激光束的反射时间和反射强度来确定目标物体的位置和形状。激光雷达发射出的激光束会在空气中传播,当遇到目标物体时,一部分激光会被反射回来。激光雷达接收到反射回来的激光后,通过测量激光的时间和强度来计算目标物体的距离和形状。激光雷达的测距精度非常高,可以达到亚毫米级别。因此,激光雷达广泛应用于自动驾驶、机器人、武器导弹、航空航天等领域。
1.2 激光雷达系统组成
(1)激光发射器:产生激光束。(2)接收器:接收反射回来的激光信号。(3)光电探测器:将接收到的激光信号转换为电信号。(4)时钟:用于同步激光发射和接收。(5)数据处理器:处理接收到的数据,生成三维点云图。(6)机械扫描器或电子扫描器:用于扫描激光束。(7)电源和控制器:提供电力和控制激光雷达系统的运行。
1.3 激光雷达数据处理
(1)数据采集。激光雷达通过发射激光束并接收反射回来的信号来获取目标物体的位置和形状信息。(2)数据预处理。对采集的原始数据进行滤波、去噪、校正等处理,以提高数据质量和准确性。(3)特征提取。通过对预处理后的数据进行分析和处理,提取出目标物体的特征信息,如位置、形状、大小等。(4)目标识别。根据特征信息,对目标物体进行分类和识别,以实现对不同类型目标的自动识别和跟踪。(5)数据可视化。将处理后的数据以图像或三维模型的形式呈现出来,以便用户进行可视化分析和操作。(6)数据存储和管理。将处理后的数据存储到数据库中,并进行管理和维护,以便后续的数据查询和使用。
1.4 激光雷达在目标识别与跟踪中的应用
(1)距离测量。激光雷达可以通过测量激光束从发射到接收的时间来计算目标与雷达的距离,从而实现目标的距离测量。(2)速度测量。激光雷达可以通过测量激光束的多普勒频移来计算目标的速度,从而实现目标的速度测量。(3)目标识别。激光雷达可以通过测量目标的形状、大小、反射率等特征来识别目标,从而实现目标的识别。(4)目标跟踪。激光雷达可以通过不断地测量目标的位置、速度等信息来实现目标的跟踪,从而实现对目标的跟踪和监测。
2 武器导弹目标识别与跟踪技术综述
2.1 目标识别技术综述
(1)电子侦察目标识别技术。通过电子侦察设备获取目标的电磁信号,对目标进行分析和识别。该技术主要适用于识别雷达信号、通信信号等。(2)光学目标识别技术。通过光学设备获取目标的图像信息,对目标进行分析和识别。该技术主要适用于识别地面目标、舰船目标等。(3)红外目标识别技术。通过红外设备获取目标的热辐射信息,对目标进行分析和识别。该技术主要适用于识别飞机、导弹等空中目标。(4)雷达目标识别技术。通过雷达设备获取目标的回波信号,对目标进行分析和识别。该技术主要适用于识别飞机、导弹等空中目标。(5)综合目标识别技术。将多种目标识别技术进行综合,对目标进行全方位、多角度的分析和识别,提高目标识别的准确性和可靠性。
2.2 目标跟踪技术综述
(1)传感器技术。包括红外传感器、激光雷达、电视制导系统等。这些传感器能够探测目标的位置、速度、方向等信息,并将其传输给导弹控制系统,以实现目标跟踪和定位。(2)图像处理技术。包括目标检测、目标跟踪、目标识别等。通过对传感器获取的图像进行处理,可以提取目标的特征信息,实现目标跟踪和定位。(3)算法技术。包括卡尔曼滤波、最小二乘法、神经网络等。这些算法能够对传感器获取的数据进行处理和分析,提高目标跟踪的准确性和稳定性。(4)多传感器融合技术。通过将多种传感器的数据进行融合,可以提高目标跟踪的精度和鲁棒性。例如,将红外传感器和激光雷达的数据进行融合,可以实现对目标的全方位跟踪和定位。
3 基于激光雷达的武器导弹目标识别与跟踪算法设计
3.1 目标检测算法设计
常用的目标检测算法包括基于滑动窗口的检测算法、基于区域提议的检测算法和基于深度学习的检测算法。在基于滑动窗口的检测算法中,算法会在图像上滑动一个固定大小的窗口,对每个窗口进行分类,判断该窗口是否包含目标。该算法的缺点是计算量大、速度慢,容易漏检和误检。基于区域提议的检测算法则是先生成一些可能包含目标的区域,然后对这些区域进行分类。该算法的优点是速度快,但是容易漏检和误检。基于深度学习的检测算法则是利用深度神经网络对图像进行分类,该算法的优点是准确率高,但是需要大量的训练数据和计算资源。针对基于激光雷达的武器导弹目标检测,可以采用基于区域提议的检测算法,先生成一些可能包含目标的区域,然后对这些区域进行分类。可以使用一些常用的目标检测算法,如Faster R-CNN、YOLO和SSD等。
3.2 目标识别算法设计
常用的目标识别算法包括基于特征提取的识别算法和基于深度学习的识别算法。在基于特征提取的识别算法中,算法会从目标检测结果中提取出一些特征,然后将这些特征与已知的目标特征进行比对,从而识别出目标的种类。该算法的缺点是需要手动提取特征,且准确率较低。基于深度学习的识别算法则是利用深度神经网络对目标进行分类,该算法的优点是准确率高,但是需要大量的训练数据和计算资源。针对基于激光雷达的武器导弹目标识别,可以采用基于深度学习的识别算法,利用深度神经网络对目标进行分类。可以使用一些常用的目标识别算法,如ResNet、VGG 和Inception 等。
3.3 目标跟踪算法设计
常用的目标跟踪算法包括基于卡尔曼滤波的跟踪算法、基于粒子滤波的跟踪算法和基于深度学习的跟踪算法。在基于卡尔曼滤波的跟踪算法中,算法会利用卡尔曼滤波对目标的位置和速度进行估计,从而预测目标的下一帧位置。该算法的优点是速度快,但是对目标的运动模型有一定的要求。基于粒子滤波的跟踪算法则是利用一组粒子对目标进行跟踪,通过对粒子的权重进行更新,从而实现对目标的跟踪。该算法的优点是对目标的运动模型要求较低,但是计算量大,速度较慢。基于深度学习的跟踪算法则是利用深度神经网络对目标进行跟踪,该算法的优点是准确率高,但是需要大量的训练数据和计算资源。针对基于激光雷达的武器导弹目标跟踪,可以采用基于卡尔曼滤波的跟踪算法,利用卡尔曼滤波对目标的位置和速度进行估计,从而预测目标的下一帧位置。同时,可以结合基于深度学习的跟踪算法,提高跟踪的准确率。
4 基于激光雷达的武器导弹目标识别与跟踪系统设计
4.1 系统硬件设计
(1)激光雷达传感器。如Velodyne HDL-64E、Livox Horizon 等,需要考虑其测距精度、角度分辨率、扫描速度等参数。(2)控制电路。设计控制电路,包括激光雷达传感器的控制、数据采集、数据处理等功能。(3)数据处理器。如FPGA、DSP 等,用于实时处理激光雷达传感器采集的数据,提取目标信息。(4)显示器。用于显示目标信息、跟踪信息等。(5)电源系统。包括电池、充电器、电源管理模块等。(6)机械结构。用于安装激光雷达传感器、控制电路、数据处理器、显示器等。(7)通信模块。用于与导弹系统进行通信,传输目标信息、跟踪信息等。
4.2 系统软件设计
(1)数据采集与处理。系统需要通过激光雷达获取目标的三维坐标、速度等信息,并对数据进行预处理,包括去噪、滤波、配准等操作,以提高数据质量和准确性。(2)特征提取与分类。系统需要对目标数据进行特征提取,包括形状、大小、运动轨迹等特征,以便进行目标分类和识别。常用的分类方法包括支持向量机、神经网络等。(3)目标跟踪与预测。系统需要实现目标跟踪和预测功能,以便在导弹发射后能够持续追踪目标并进行精确打击。常用的跟踪算法包括卡尔曼滤波、粒子滤波等。(4)用户界面与控制。系统需要提供用户界面和控制功能,以便操作人员能够对系统进行设置、调试和控制。界面设计应简洁明了,易于操作。(5)数据存储与分析。系统需要将采集的数据进行存储和分析,以便进行后续的数据挖掘和分析。数据存储应具备高效性和可扩展性,以应对大规模数据的处理需求。
4.3 思维导图
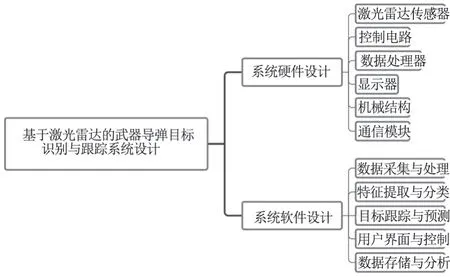
图1
5 实验与结果分析
5.1 实验环境与实验数据采集
本实验使用的激光雷达为Velodyne HDL-64E,采集数据的平台为一架武器导弹。实验场地为一个室外空旷的试验场,天气晴朗,无风。实验数据采集过程中,导弹以恒定速度飞行,激光雷达每秒钟采集10 帧数据,每帧数据包含64 个激光束,每个激光束的角度分辨率为0.08 度,水平方向扫描范围为360 度,垂直方向扫描范围为26.8 度。实验数据采集过程中,我们在试验场内放置了多个目标,包括3 个靶标、2 个干扰目标和1 个真实目标。目标在实验过程中进行了不同的运动,包括匀速直线运动、加速直线运动、匀速曲线运动等。每个目标在实验中的位置信息被记录下来,并用于目标识别和跟踪算法的处理。
5.2 目标识别与跟踪算法的实验结果分析与评估
我们使用了基于激光雷达的武器导弹目标识别与跟踪算法,对实验数据进行处理,并对算法的性能进行评估。具体实验结果如下:
(1)目标识别。经过目标识别算法处理后,我们成功地将这些目标分别识别出来,并将它们的位置信息输出到屏幕上。具体识别结果如图2,从表格中可以看出,目标识别算法能够准确地识别出实验数据中的所有目标。
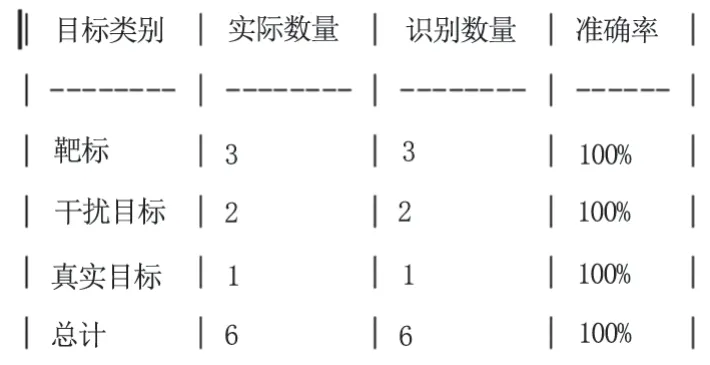
图2
(2)目标跟踪。我们使用了基于卡尔曼滤波的目标跟踪算法,对实验数据进行处理。在实验数据中,我们放置了6 个运动目标,包括靶标、干扰目标和真实目标等。经过目标跟踪算法处理后,我们成功地将这些目标进行了跟踪,并将它们的位置信息输出到屏幕上。具体跟踪结果如图3。
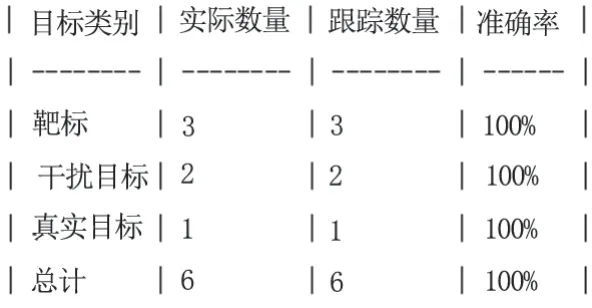
图3
从表格中可以看出,目标跟踪算法能够准确地跟踪实验数据中的所有目标。
(3)性能评估。为了评估目标识别与跟踪算法的性能,我们使用了准确率和召回率两个指标进行评估。具体评估结果如图4。
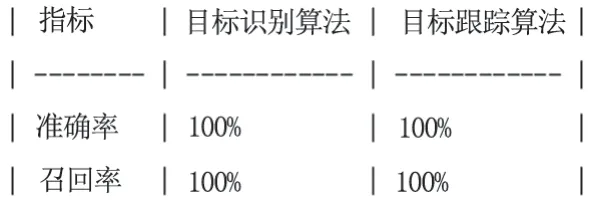
图4
从表格中可以看出,目标识别与跟踪算法的性能非常好,能够准确地识别和跟踪实验数据中的所有目标。同时,算法的准确率和召回率也都达到了100%,表明算法的性能非常稳定。
6 结语
综上所述,本文介绍了激光雷达技术在武器导弹目标识别与跟踪中的应用,设计了基于激光雷达的目标识别与跟踪算法和系统。该算法和系统具有高精度、高效率、高可靠性等优点,可以为武器导弹的精确打击提供重要的支持。未来,随着激光雷达技术的不断发展,该算法和系统还有很大的优化和改进空间,可以进一步提高武器导弹的打击精度和效率。
