基于AVMD-TOTEO 与深度学习的轴承故障诊断方法
2024-03-18蔡华锋孙秋
蔡华锋,孙秋
(湖北工业大学电气与电子工程学院,湖北 武汉 430068)
随着工业设备的智能化发展,滚动轴承作为机械设备中的重要组成部分,在集成度高的复杂运行环境中往往会受到粉尘、腐蚀和润滑不足等恶劣环境的影响从而造成设备故障,特别是设备中的滚动轴承发生故障后若未能及时预警和处理,将会造成重大的安全事故,给企业带来极大的经济损失。因此,如何准确且及时诊断出轴承的故障显得尤为重要。基于上述原因本文提出了一种基于AVMD-TOTEO 与深度学习的轴承故障诊断方法。
1 本文方法
结合信号分解算法、信号分析算法和神经网络等技术,提出了基于AVMD-TOTEO 与深度学习的轴承故障诊断方法。该方法主要由故障信号处理和故障诊断模型两个部分组成。
1.1 故障信号处理设计
在故障信号处理设计中,主要采用信号分解算法和信号分析算法,减少故障信号中的一些干扰,突出信号中的影响分量。基于AVMD-TOTEO 的故障信号处理流程如图1 所示。

图1 基于AVMD-TOTEO 的故障信号处理流程图
图1 中,将VMD 算法与峭度值相结合提出了一种自适应的VMD 参数选择方法,首先,在对VMD 算法的基本参数设置中,将惩罚因子设为2000,其他参数设为默认值。之后,将分解个数K 从2 ~9 依次对故障信号进行分解并重构,利用峭度值对各个重构信号进行评估,并选择峭度值最大的重构信号作为故障信号。这种AVMD参数选择方法的优点是能够在去除故障信号中部分干扰的同时,突出原有信号中的冲击部分。最后将峭度值最大的重构信号带入TOTEO 算法中进行信号分析,用于更好分辨信号的瞬时变化情况,检测出信号中更多的瞬时冲击成分,并放大故障信号中的冲击部分,从而进一步扩大不同故障之间的差异性。
1.2 故障诊断模型设计
在故障诊断模型设计过程中,提出了一种GRU-CNNGAP 故障诊断模型,该模型结合了GRU 网络在处理时间序列数据方面的独特优势和CNN强大的特征提取能力。同时,利用一维GAP 层代替全连接层进行模型参数压缩和数据维度转换,有效降低模型训练参数,提高故障诊断精度。
改进后的GRU-CNN 分类模型诊断过程如下:(1)以处理后的故障信号为输入,通过数据融合、数据拦截和归一化对数据进行处理,生成GRU 层可读的训练样本。(2)GRU 层提取每个具有时间特征的训练样本的特征,捕获并记忆样本中的相关特征,然后将内存信息逐层传输到较低的GRU 网络。(3)利用CNN 层深度挖掘GRU层的输出特征。通过构建多个CNN 层,可以从特征数据中提取不同故障之间的微小差异,从而进一步提高模型的诊断精度。(4)在CNN 层之后,使用1D-GAP 层代替传统的全连接层,在使用全局信息的同时,可以大大减少模型的参数数量,可以提高模型的训练和诊断速度。(5)通过设置Softmax 分类器,对一维GAP 层的输出值进行分类,给出诊断结果。GRU-CNN-GAP 模型的诊断逻辑流程图如图2 所示。
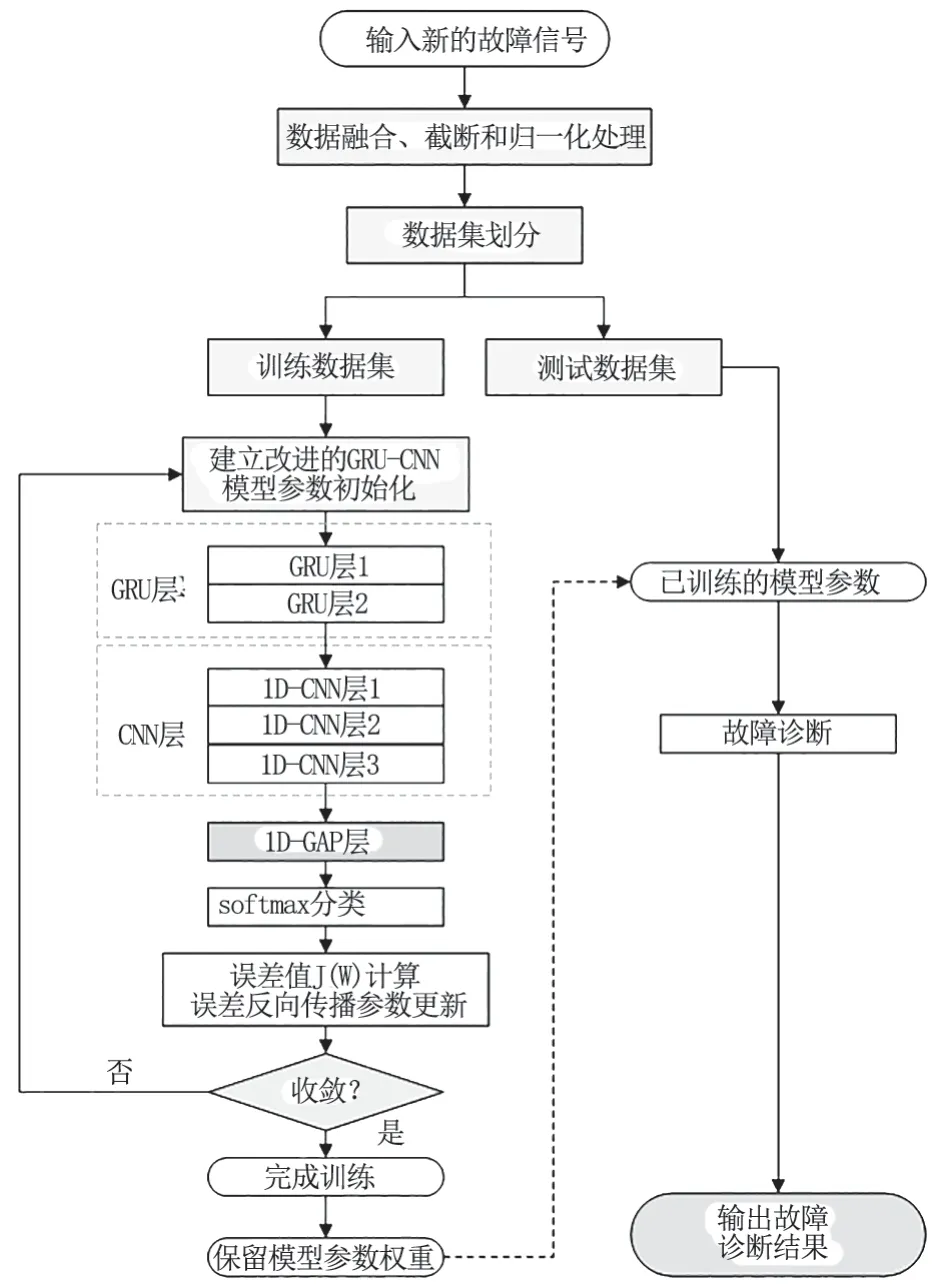
图2 GRU-CNN-GAP 诊断模型逻辑流程图
2 实验分析
2.1 数据分析
为了验证该方法的有效性,本次实验采用了西安交通大学XJTU-SY 轴承数据集进行分析。数据集中一共包含3 种工况,在每种工况下分别测试了5 个相同轴承的运行情况,使用2 个单向加速度传感器分别通过磁座固定于测试轴承的水平和竖直方向进行信号采集,采样频率设置为25.6kHz,采样间隔为1min,每次采样时长为1.28s,每个样本有32768 个数据点。根据Tian Xue的研究,将Bearing1_1、Bearing1_4、Bearing2_2、Bearing2_3、Bearing3_3 和Bearing3_5 的最终样本作为实验数据。由于轴承故障的数据集过于庞大而文章篇幅有限,无法对所有故障信号进行分析,所以本文在实验中仅以Bearing1_4 中第一段水平端故障信号为例对数据进行处理和分析。
在对故障信号处理前,需要先对原始数据集进行预处理,这样在故障信号处理好后就可以直接将数据集作为输入带入故障诊断模型中进行学习,否则,就会导致计算机内在溢出而无法训练。在数据集预处理时需要先对故障数据集进行数据截断和样本生成。为了让每组样本中都能够包含故障的有效信息,本文将电机转动一圈的点数作为参考来选择合适的样本长度,通过采样频率和三种工况所对应的转速来计算出轴承每转过一圈的点数范围为640 ~732,同时为了获得一定的数据充裕量,最终将每个训练样本的长度设置为1000 个数据点。
将训练样本设置好后还需增加训练样本的数量,用于提升模型的泛化能力。本次实验采用了滑动窗口重叠采样法进行训练样本生成,样本生成公式如下:
式中,L 为新生成的样本数量,l 为原始故障信号的数据点个数,W 为新的训练样本长度,B 为滑动窗口的步长,λ为采样重叠率。此时,将滑动窗口的步长设为100,即采样重叠率为90%,可以求出新生成的样本数量为318.7。为了方便对实验结果进行统计和分析,取前300 个样本作为训练和测试样本,因此,经过数据截断操作后生成的每类故障集大小为[300,2,1000],其中300 为样本数量,2 为水平和竖直方向上的故障信号,1000 为单个样本长度。
2.2 故障信号处理
在对原始数据预处理后,首先采用所提出的AVMD方法对Bearing1_4中第一段水平端故障信号进行处理,不同重构信号所对应的峭度值如图3 所示。
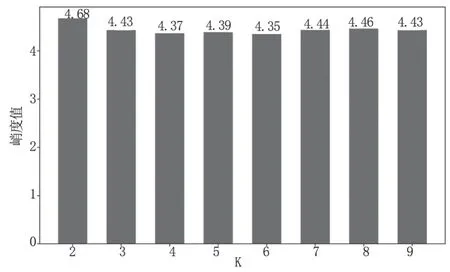
图3 不同重构信号所对应的峭度值
从图3 可以看出,当分解个数K 设置为2 时,信号重构后的峭度值最大,并且能够在消除部分干扰的同时最大限度地保留故障信号的冲击信号,此时经过AVMD处理后的重构信号如图4 所示。
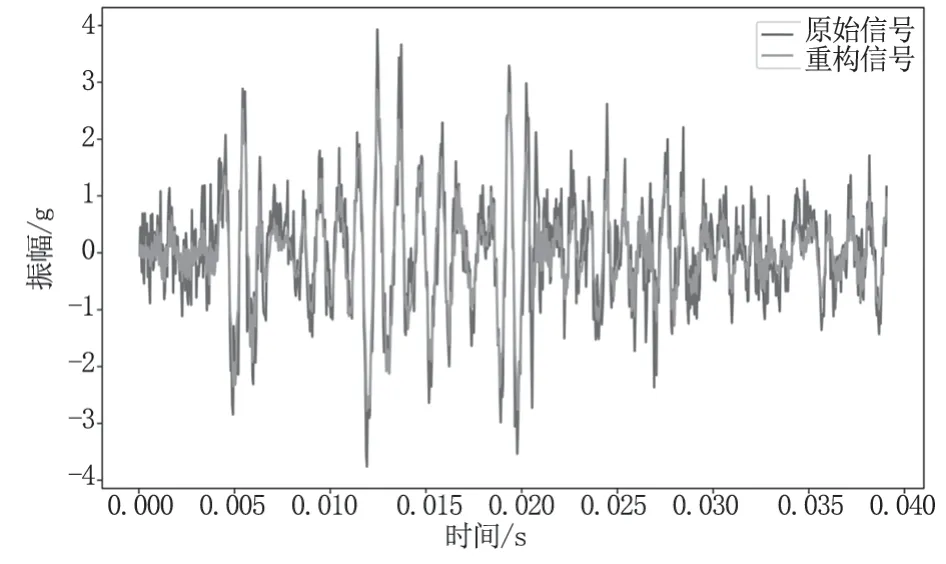
图4 AVMD 处理后的重构信号
通过观察可以发现,经过AVMD 处理后的重构信号将部分干扰去除,并将主要的冲击信号保留,从而增强了原始信号的故障特征。之后利用改进的TOTEO 算法对重构后的故障信号进行信号分析,TOTEO 分析后的信号如图5 所示。

图5 TOTEO 信号分析结果
从图5 可以看出,TOTEO 算法将冲击信号中较强的部分进一步放大,同时,对冲击信号较弱的部分进一步缩小,这样可以放大故障信号的特征,从而扩大各种故障之间的差异性。将Bearing1_4 中第一段水平端故障信号处理好后,利用相同的方法对其他故障信号水平和竖直方向的故障信号进行处理,将处理过程中信号的峭度值记录并进行比较,比较结果如图6 所示。
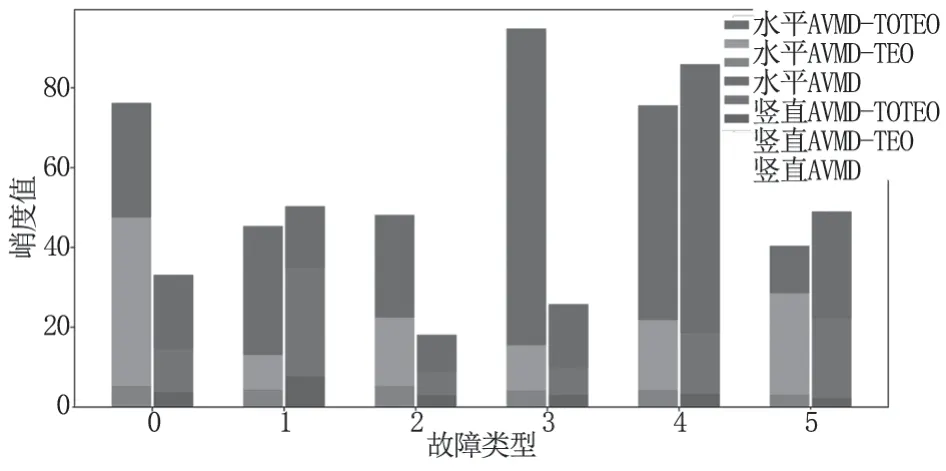
图6 不同故障类型的峭度均值比较
图6 将不同故障信号处理中AVMD、AVMD-TEO 和AVMD-TOTEO 时刻的峭度值进行了比较,从图中可以看出,经过AVMD 处理后的故障信号峭度均值变化较小,这使得各个故障间的信号特征并不明显,而经过AVMD-TEO 处理后的故障信号,他们的峭度均值得到了不同程度的增强,这是由于TEO 算法能够充分反映原始信号的频率、幅值以及能量的变化情况。在此基础上,本文提出的AVMDTOTEO 方法则将噪声频率干扰进一步降低,同时增强了故障信号的冲击特征,使峭度值增大,从而进一步扩大了故障之间的差异性,提高了故障诊断模型的检测精度。
最终,故障信号处理后生成的每类新的故障集大小为[300,2,1000]。从每类故障集中,随机的选取80%作为训练集,20%作为测试集,同时采用Min-Max 函数对数据进行归一化处理,用于加快梯度下降求得最优解的速度。新生成的轴承故障数据集如表1 所示。
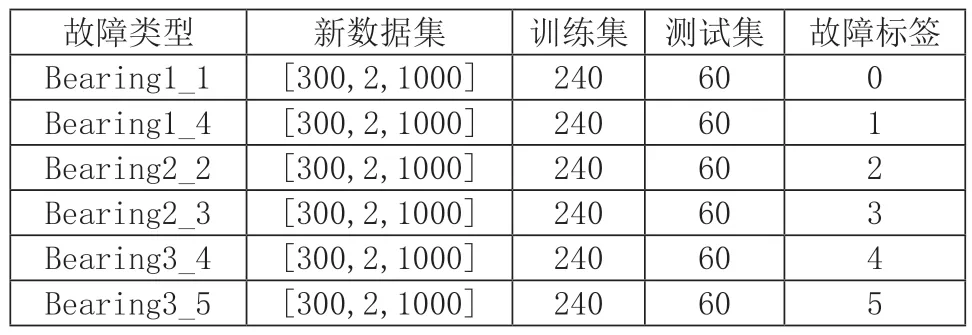
表1 新的轴承故障数据集
2.3 搭建GRU-CNN-GAP 故障诊断模型
在对GRU-CNN-GAP 故障诊断模型设计过程中,设置不同的超参数会对诊断结果造成影响,因此,本文对诊断模型的网络层数、神经元个数和训练次数等超参数进行反复调参实验,最终建立了一个包含2 层GRU 和3 层1D-CNN 的故障诊断模型,其中将GRU 层的神经元个数设置为256 和128,将1D-CNN 层的输出维度设置为64、32和6。故障诊断模型首先采用2 个GRU 层用于对具有时间序列的训练样本进行特征提取,捕获并记忆样本中的相关特征。然后将提取到的记忆特征再输入3 个1D-CNN 层对特征进行深度挖掘,将不同故障之间的微小差异从数据中提取出来,从而进一步提升模型的诊断精度。在CNN层之后,采用1D-GAP 层代替全连接层,能够在防止模型训练过拟合的同时,大幅度减小模型的参数量,进一步提升模型的训练和诊断速度。最后,通过Softmax 层完成轴承故障分类。故障诊断模型的超参数如表2 所示。
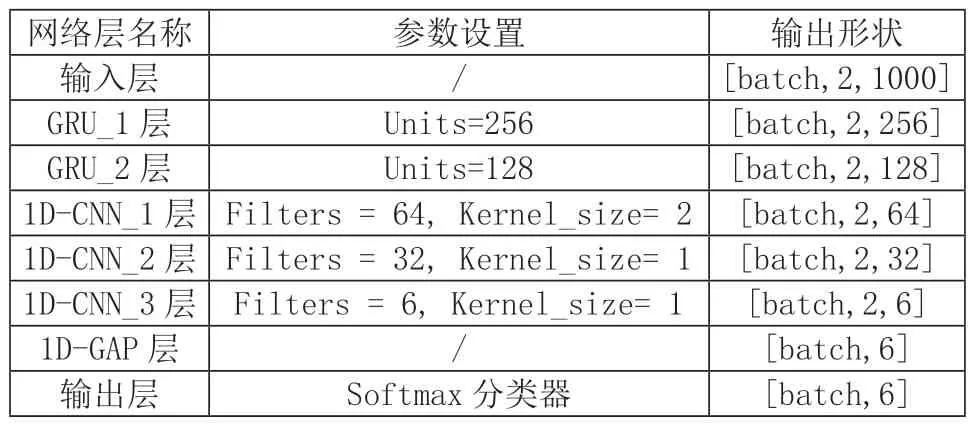
表2 GRU-CNN-GAP 故障诊断模型超参数
同时,为了提升模型的训练效果,在实验中采用了mini-batch 小批训练法和Adam 优化器对模型进行训练,将每次投入模型的样例个数Batch size 设置为4,将迭代次数设置为200 次。模型训练的误差曲线如图7 所示,可以看出模型在训练200 次后基本收敛稳定,并且未出现过拟合问题。
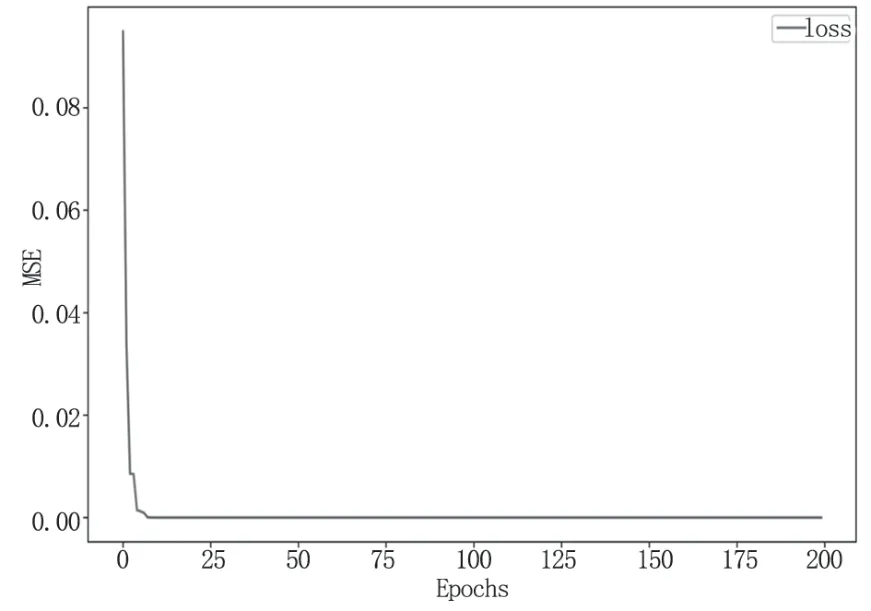
图7 训练误差曲线
2.4 实验结果与对比分析
训练好故障诊断模型后,将测试集带入设计好的模型中进行故障诊断,为了验证方法的可行性和优越性,本文分别将所提出的方法与改进前和最新的故障诊断模型进行比较。为验证方法的可行性首先进行消融实验,将所提出的方法与GRU、GRU-CNN 和GRU-CNN-GAP 进行对比分析,其中GRU-CNN 是在原始模型的基础上去掉GAP 层,用一个Flatten 层和三个全连接层进行替代,将全连接层的神经元个数分别设置为128、64 和6,而GRU-CNN-GAP 模型则是在原有模型不变的情况下进行训练和测试,两种模型的训练集和测试集均来自原始的轴承故障数据集。在评估方法中,采用时间指标和准确性指标对诊断结果进行评估。在时间方面,主要观察诊断模型的训练时间和测试时间。在准确性方面,评价指标主要有精确率(P)和调和均值(F1),数学表达式为:
式中,TP 为真正类;FP 为假正类;TN 为真负类;FN 为假负类。通过计算就可以得到以上2 种评价指标。各个模型的诊断结果如表3 所示。
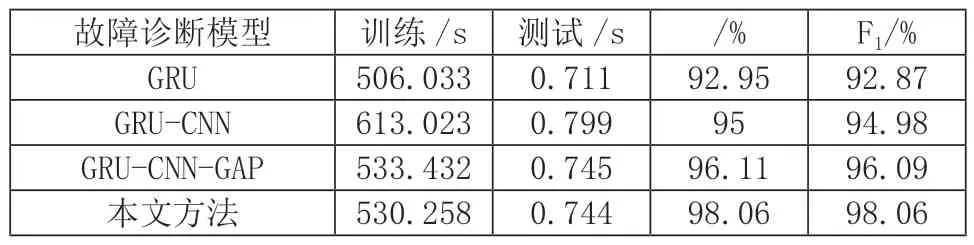
表3 消融实验结果对比
表3 中,采用时间指标和准确性指标对结果进行评估。首先,在训练和测试时间方面,GRU-CNN-GAP 模型与GRU-CNN 模型在训练时间上减少了79.591 秒,在测试时间中又减少了0.054 秒,这是由于GRU-CNN 模型在末端采用了3 个全连接层导致模型的网络层数和参数总量明显增加,从而延长了模型的训练和测试时间,而采用GAP 层代替传统的全连接层,能够大幅度减小模型的参数量,进一步提升模型的训练和诊断速度。其次,在诊断准确率方面,GRU-CNN 模型的均值为94.98%,而本文设计的GRU-CNN-GAP 模型,将GAP 层代替全连接层后均值已经提升至96.09%,从而说明本文设计的GRU-CNN-GAP 模型可以获得更高的特征提取能力和故障识别率。而相与GRU-CNN-GAP 模型,基于AVMD-TOTEO与深度学习的故障诊断方法则是将均值进一步提升至98.06%,原因是在输入层中通过AVMD-TOTEO 方法对故障信号中的冲击信号进行保留和放大,从而扩大了故障之间的差异性,这种差异性进一步提升了模型的故障识别率。
为了进一步验证所提出方法的优越性,本次实验又将所提出的方法与Tian Xue 提出的MobileNetV2-FSK诊断模型、杨慧提出的ICNN-BiGRU 诊断模型、吕渊提出的MLP-PPO 诊断模型和Zhijian Wang 提出的NKHKELM 诊断模型进行比较分析。故障诊断模型中的每个参数都根据文章中的值进行设置。诊断结果如表4 所示。 ※
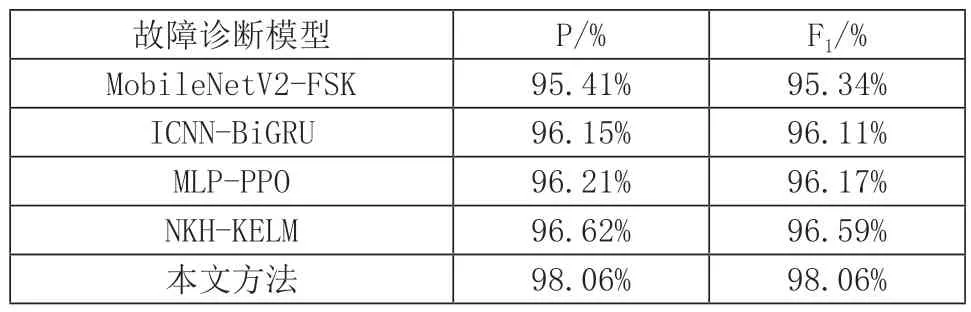
表4 不同轴承故障诊断模型对比
从诊断结果可以看出,采用最新的MobileNetV2-FSK 模型、ICNN-BiGRU 模型、MLP-PPO 模型和NKH-KELM模型能够将故障诊断准确率提升至95.41%、96.15%、96.21%和96.62%,而本文所提出的轴承故障诊断方法相比于其他4 个模型,在诊断准确率方面分别增加了2.65%、1.91%、1.85%和1.44。同时,又在调和均值中分别增加了2.72%、1.95%、1.89%和1.47%。实验结果表明,本文提出的基于AVMD-TOTEO 与深度学习故障诊断方法具与其他诊断模型相比,具有一定的优越性。
3 结语
本文提出一种基于AVMD-TOTEO 与深度学习的轴承故障诊断方法,其主要贡献如下。
(1)提出了一种用于扩大故障信号特征的方法。首先利用AVMD 算法选择合适的分解个数后对信号进行重构,在去除故障信号部分干扰的同时突出其中的冲击信号,之后利用TOTEO 算法对重构信号进行分析,从而进一步增强故障之间的差异性。
(2)提出了一种GRU-CNN-GAP 故障诊断模型。将传统GRU-CNN 模型中的全连接层用1D-GAP 层进行替代,能够在防止模型训练过拟合的同时,大幅度减小模型的参数量,进一步提升模型的训练和诊断速度。
(3)将所提出的故障诊断方法最新的几种轴承故障诊断模型进行比较,比较结果显示,所提出的方法不仅能够提升故障诊断准确率,还可以提高训练和诊断速度,与其他故障诊断模型相比,本方法具有更加优越的诊断性能。
在未来的工作中,计划将一些改进的分解算法与其他优化算法相结合,进一步扩大故障之间的差异性。此外,将会对所提出的故障诊断模型进行改进,以提高模型的可迁移性。
