基于PLC 和力控组态软件的搬运机械手模拟仿真系统设计
2024-03-18杨轶霞
杨轶霞
(甘肃工业职业技术学院,甘肃 天水 741025)
搬运机械手是能模仿人和臂的某些动作功能,用以固定程序抓取、搬运物件或操作工具的自动操作装置,在工业自动化生产过程中,机械手广泛应用于机械加工、食品、医药等领域的自动流水线、货物装卸调用,在现代的自动化生产车间中都配有搬运机械手,机械手可用于搬运货物、取料、送料等,该文利用力控组态软件平台,以PLC 作为控制器,设计了可以远程监控的搬用机械手控制系统。
1 搬运机械手的控制要求
某生产线上有一台工业机械手,主要功能是将工件由工作台A 处搬运到工作台B 处。示意图如图1 所示。
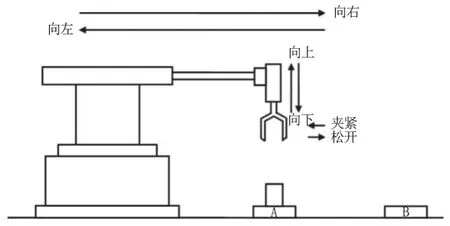
图1 机械手工作示意图
机械手初始状态:机械手在左上位,原位指示灯HL点亮,左限位开关SQ4 和上限位开关SQ2 受压闭合。
(1)按下起动按钮SB1 后,原点指示灯HL 灭,机械手下降电磁阀YV1 得电,机械手开始下降。
(2)机械手下降到位后,压动下限位开关SQ1,YV1 断电,夹紧电磁阀YV2 得电,机械手夹紧工作。
(3)完全夹紧后,上升电磁阀YV3得电,机械手上升。
(4)上升到上限位SQ2 后,机械手右移电磁阀YV4得电,机械手右移。
(5)右移到右限位SQ3 后,机械手下降电磁阀YV1得电,机械手下降。
(6)下降到下限位SQ1 后,机械手夹紧电磁阀YV2复位,机械手将工件松开。
(7)完全松开后,上升电磁阀YV3得电,机械手上升。
(8)上升到位后,压动上限位开关SQ2,机械手左移电磁阀YV5 得电,机械手左移。
左移到位后,压下左限位开关SQ4,机械手回到原点,至此一个周期的动作结束。再按一次起动按钮SB1 就开始下一个周期运行。
2 搬运机械手控制系统总体设计
搬运机械手一个周期的动作属于典型的顺序控制,通过控制不同的电磁阀线圈得电或断电完成机械手上升、下降、左右移动等动作。利用力控组态软件和PLC构建的虚拟仿真平台制作机械手的监控界面,组态画面显示机械手的动作状态。通过PLC 控制器实现机械手各环节的控制。
本系统选用北京三维力控公司的ForceControl7.1版本,力控具有完整的分布式体系结构,与高可靠的PLC 和网络系统结合,通过多种通信协议,组态可视化操作界面,达到集中管理和监控的目的。
搬用机械手的运行通过PLC 进行控制,控制器选用西门子S7-200 系列的CPU226 PLC,在上位计算机中安装力控组态软件和 STEP7 MicroWinV4.0 编程软件,计算机与下位机PLC 用RS232C 标准串口COM1 实现硬件通信连接。搬用机械手仿真系统设计包括搬用机械手组态画面的构建、PLC 程序设计。
3 PLC 控制系统设计
3.1 I/O 地址分配表
根据搬用机械手的控制要求,将PLC 的I/O 分配如图2 所示。

图2 机械手输入输出分配表
3.2 控制系统程序设计
根据搬用机械手的工序,画出顺序功能图如图3所示。
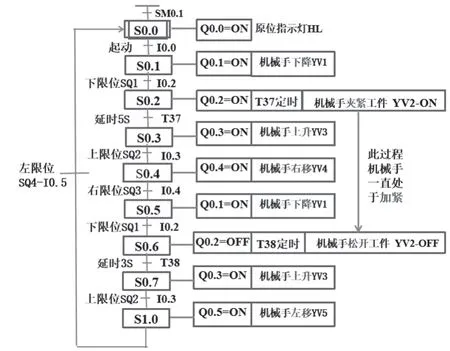
图3 机械手顺序功能图
4 搬运机械手力控组态监控的设计
4.1 I/O 设备组态和数据库组态
(1)I/O 设备组态。底层设备PLC、DCS、智能仪表等在力控中都属于I/O 设备,需要先定义,数据库变量才能与外部设备交换数据。本系统中由于使用的I/O设备是西门子S7-200 系列PLC,因此,在导航器的跟结点“I/O 设备”下面双击“S7-200PLC[PPI]”选项,通信方式使用串口RS232,选用COM1 串口。串口通信参数设置是波特率为9600,奇偶校验为偶校验,数据为7 位,停止为1 位。
(2)数据库点,本系统中建立12 个数据库点,其中的启动按钮、停止按钮、上下、左右限位开关都是PLC 的输入变量,在PLC 中的地址分别是M0.0 ~M0.5。建立数据库连接项(图4)。
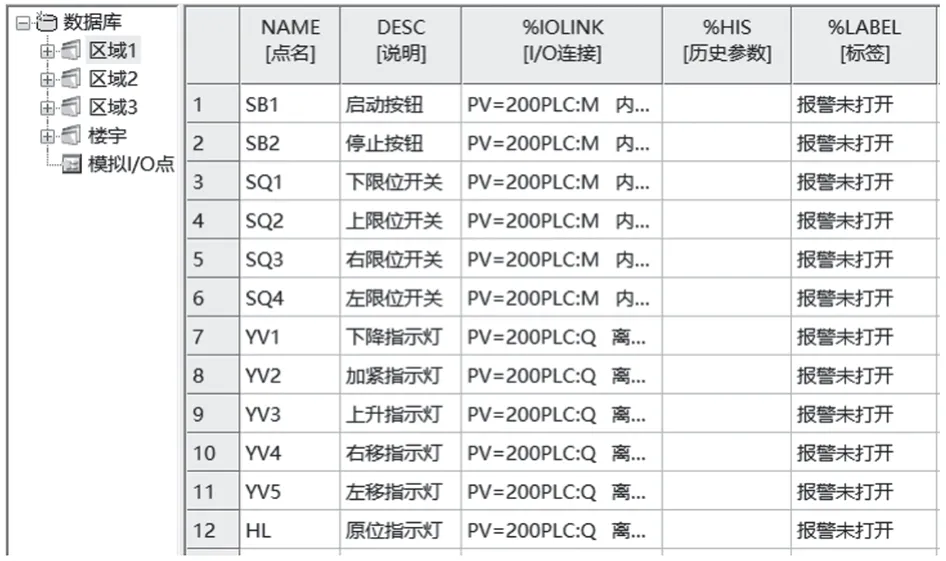
图4 机械手数据库点
4.2 组态画面设计
进入力控的开发系统,利用工具栏中的工具箱和图库,在新建界面设计搬运机械手的监控画面。监控界面包括三部分:搬运机械手上升、下降、左右移位指示灯的状态显示;上下左右限位开关的动作状态和启动及停止按钮等。对按钮和指示灯建立动画连接和脚本编辑,将图形对象与变量或表达式建立连接,搬运机械手监控界面如图5 所示。
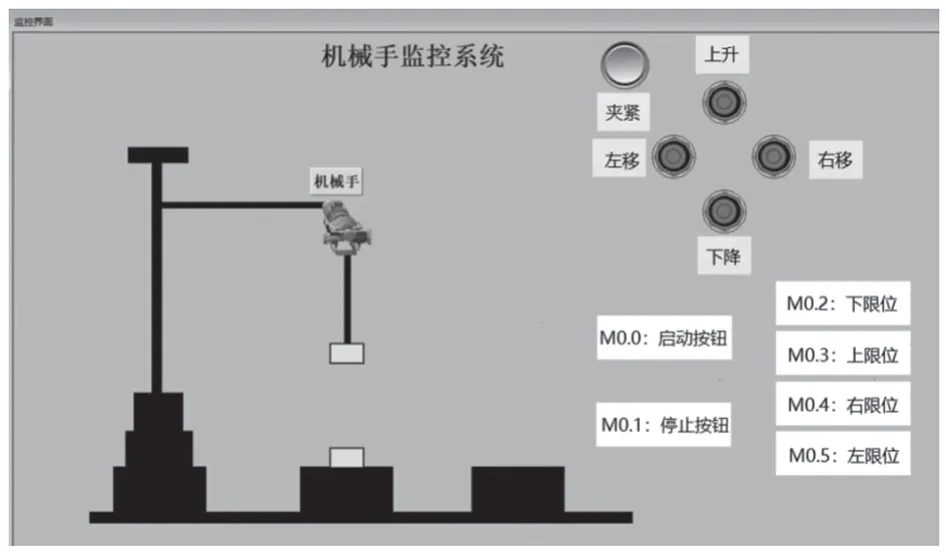
图5 机械手监控组态画面
5 系统调试
通过编写PLC 控制程序实现控制要求,程序调试无误后,通过PC/PPI 线缆连接S7-200PLC 的COM0 和监控计算机的COM1 口,设置正确的通信,将编写好的程序下载至PLC 中,同时进入力控的运行系统,在显示“选择窗口”选择“搬运机械手”画面,通过力控来采集底层数据实现数据采集,在监控计算机中实现搬运机械手各工序监控画面的动画效果,搬运机械手PLC 控制程序如图6 所示。
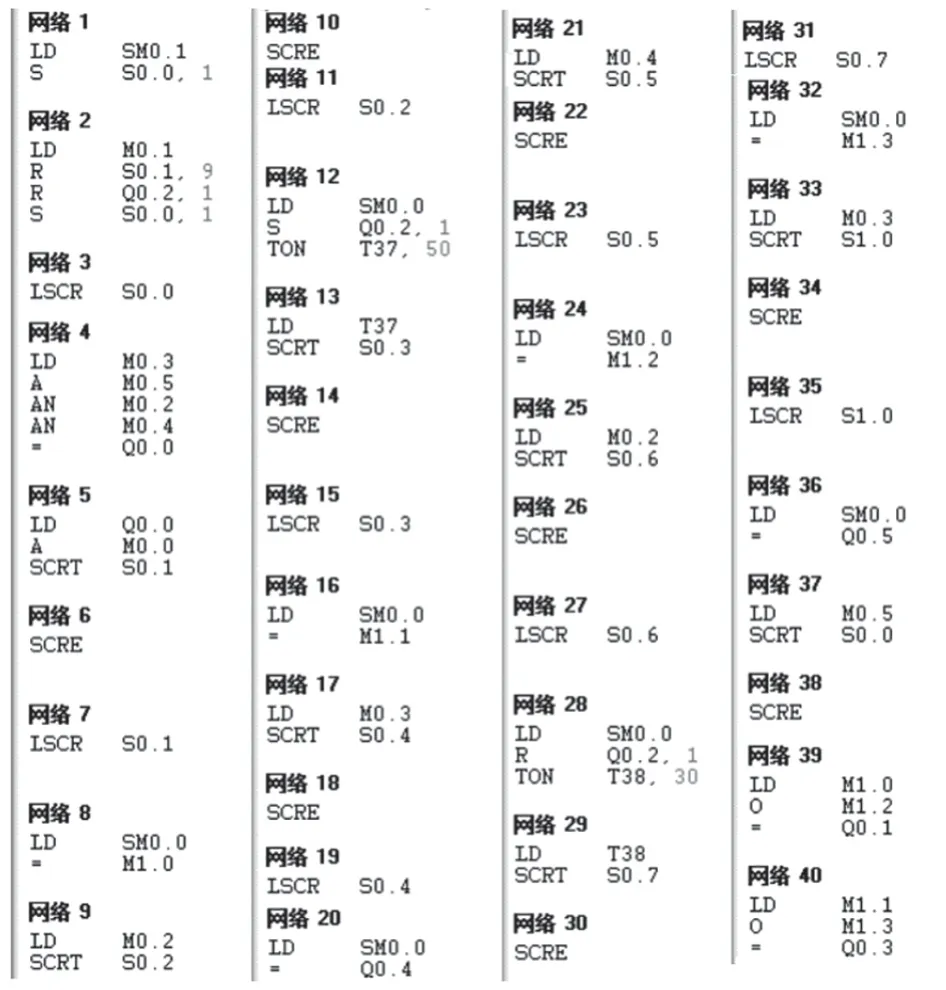
图6 搬运机械手梯形图程序
6 结语
通过基于西门子PLC 和力控组态软件搬运机械手监控系统的设计与实施,不仅简单有效地对机械手的工作过程进行仿真模拟控制,而且激发了学生对PLC 编程和工业组态技术浓厚的学习兴趣,提高了学生的工程应用能力。
