卸船机无人接卸系统中基于DEM 的三维模型重建应用研究
2024-03-18应冬军李恒李嘉辰刘强陈剑胡文波
应冬军,李恒, 李嘉辰,刘强,陈剑,胡文波
(国家电投江西电力有限公司新昌发电分公司,浙江 新昌 312500)
1 研究背景
码头散料装卸的主要方式根据自动化程度进行分类可分为手动、半自动和全自动运行方式。目前,桥式抓斗卸船机是散料码头最重要并且最普遍的接卸设备,其工作稳定性和效率会直接影响码头的生产力。过去一段时间内,卸船机自动化发展非常缓慢,卸船机接卸散料的工作主要还是通过人工进行操作,也就是手动运行方式,但是在这种方式下操作手的工作经验以及工作状态极大地影响了散料接卸的效率和安全性,并且工作环境相对恶劣,操作强度也比较大,对于操作手来说,长时间的低头操作对于操作手的身体健康以及生产安全造成了一定的隐患。随着科学技术的不断发展以及现在市场的大规模扩展,为了提升卸船机工作的安全性和稳定性,改善工人的工作条件,高度智能化自动化的卸船机已经逐渐成为新的发展方向。实现桥式抓斗式卸船机的自动化接卸功能是一个比较复杂的问题,其中包括在恶劣天气下抓斗的防撞、防摇、防摆问题以及抓取策略等难题。目前国内外对于抓斗的防摆的自动策略研究相对比较多,但是对于在散料料堆中如抓斗的抓取点的位置规划研究相对比较少,为使卸船机进行高效率的工作,接卸过程中散料的三维数据就成为实现高效作业的关键问题。本文将基于DEM 模型,对船舱内三维数据重建进行讨论和验证。
2 三维激光扫描系统
快速获取空间的三维信息目前主要有两种测试方式,一种是基于测距原理来进行获取,另一种则是基于视觉的三维检测技术。目前激光扫描技术是三维扫描技术的一个分支,它具有测量速度快、测量精度高、测量的数据尺度大的特点,并且其抗干扰能力强,近年来,随着科技的发展,激光扫描技术的成本持续降低,因此可以利用激光雷达快速获取料堆精度比较高的三维数据,并且通过所获得的数据来进行料堆三维模型的重建。
2.1 三维激光扫描技术原理
三维激光扫描仪是一种具有高点位测量精度、高密度空间点、速度快并且融合激光反射强度和物体色彩等信息的,基于大面积高密度空间三维数据采集的非接触式的主动测量系统。其主要是由两部分组成,分别是一组反射棱镜以及激光测距仪。通过激光测距仪发射高速激光并经过所测物体表面得到相关的反射信号,再返回测距仪中,以达到测距的目的。
并且可以通过扫描仪至扫描点的斜距等相关信息建立每一个扫描点的三维坐标,如图1 所示。
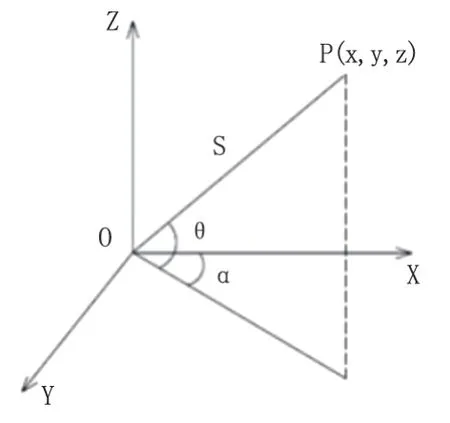
图1 激光扫描仪坐标系
三维激光扫描仪是通过利用激光测距仪发出激光脉冲信号,这一激光信号经过被测对象的表面形成漫反射之后,将激光信号反传至测距仪的接收器,将脉冲测距法获得测距观测值S,精密时钟控制编码器则同步测量每个激光脉冲横向扫描角度观测值α 和纵向扫描角度观测值θ。三维激光扫描测量一般采用其仪器内部坐标系统P,X 轴与Y 轴都是处在横向的扫描面之内,并且X、Y轴相互垂直,Z 轴与横向扫描面垂直。由此可得三维激光脚点P 坐标(XS,YS,ZS)的计算公式如式(1)所示。
2.2 三维激光扫描数据的成果形式
原始点云数据:三维激光扫描所采集的离散数据是目前对物体现状进行档案保存最快捷、最完整并且最精确的点云数据,因此,点云数据是对实际物体的尺寸进行真实的复原,其中不仅包括所检测对象的反射率信息和空间尺寸信息,而且结合高解析度的外置数码相机,能够对物体的纹理色彩信息进行逼真的保留;结合全站仪、GPS 等其他测量仪器,可将整个扫描数据置于一定空间坐标系内。并且可以通过专用的点云浏览软件,对物体的大小、角度、面积、体积等进行漫游、浏览、量测,完全在点云中实现。它取代了传统的测量的方式,将物体直接移至计算机内,利用点云完成计算机内传统的资料测绘工作。激光雷达准直性好,发散角很小,因此,可以使得扫描仪进行点对点扫描,更好地适应测量环境非常复杂的情况,所以在很多无人驾驶系统上,大多都去选择使用激光雷达当作三维轮廓数据获取的传感器。
2.3 数据滤波
由于激光雷达对灰尘、雨水、光线的敏感度较高,容易受环境的影响,在点云数据的获取时,其中原始点云数据往往包括很多噪声干扰,为了提高三维重建数据的准确性,需要采用合适的滤波方法进行数据滤波处理。常用的滤波方式有中值滤波、邻域滤波和高斯滤波等。
3 数学高程模型DEM
数学高程模型DEM(Digital elevation model)是DTM 中最基本的部分,它是对地形地貌表面的一种离散的数学表达。其表达具有多样性,容易以多种形式显示地形信息;其精度恒定,常规地图随着时间推移,图形一般会变形,然而,若是采用DEM 这种数字媒介,则可以保持其精度相对稳定不变,更新更具有实时性,也更容易实现实时化和自动化,并且也具有多比例尺的特性。
3.1 DEM 数据类型
DEM(Digital elevation model)的数据模型主要有规则格网模型、等高线模型和不规则三角网模型。
(1)规则格网模型。规则格网是将区域空间分为规则的网格单元,这些网格单元形状可以是三角形、矩形等,但是其中正方形最普遍,每个网格单元都对应了一个高程值。而规则格网的高程矩阵,可以让计算机更加方便地进行处理和存储,并且由于简单的算法以及拓扑关系,目前其是行业应用最普遍的一种模型。
(2)等高线模型。等高线模型中每条等高线对应一个已知的高程值,这样一系列等高线集合和它们的高程值就构成了一种地面高程模型,可以更加直观地描述地形的表面,方便观察和理解地形表面的规律。
(3)不规则三角网模型。不规则三角网模型是另一种地理数据类型,很多没有规则离散分布的特征点数据是可以通过建立三角网、四边形以及用其他多边形网络数据来进行模型的建造的,其中三角形是最简单的一种。目前最普遍使用的是Delaunay 三角网剖分。
3.2 DEM 数据的分布特征
数据高程模型DEM(Digital elevation model)其数据所采用的观测方法以及其获取的途径有很大的不同,所以在数据分布规律方面有相对明显的差异,按照空间分布特征可以将其分为两类:离散数据和网格状数据。
(1)离散数据结构。由于测量手段的限制,地理位置上的全部观测值是很难完全得到的,并且规则网数据同时也不能获取,这时就需要得到离散数据。其中分布没有那么规则的离散点的二维坐标也可以实现定位二维的地理空间位置,第三维也可以是属性特征值或者是高程。
(2)网格状数据结构。将DEM 所覆盖的区域分别划分成规则的网格,其中每个网格的形状和大小都是一致的,再用对应的矩阵元素的行列号去定位每一个网格点的相应的二维空间位置,而在第三维为特征值依旧可以是属性或者为高程。相比离散数据结构网格DEM 数据的数据量是前者的1/2,这样更便于检查和管理,也更适合进行数据分析。
3.3 离散数据规范化处理
由于通过激光扫描仪所获取的数据,在扫描过程中往往会由于现实环境的因素,导致间隔不相等问题,所以,要想获得更精确的数据,需要将滤波完成的数据进行规范化处理,将平面分布的离散数据点进行网格化,也就是上述的网格状数据结构。规范化处理的过程中需要采用适当的插值计算方法,保证不丢失所扫描对象的地理特征,并且不影响整个系统的效率。在新昌电厂卸船机无人接卸系统船舱和舱内物料的应用中,采用加权平均算法,将分布在同一个网格的点的高度值Z 进行均值化,其计算速度快,并且实现起来比较简单。经过以上网格规范化后会产生某些网格空数据的情况,在这种情况下,就需要进行选用合适的值进行插值处理,由于计算实时性以及计算量等问题,在此次项目中采用按距离平方倒数加权法,这样就可以建立一个网格DEM。
在进行规范化处理后,就可以进行重建料堆表面,观测图像灰度值来进行距离远近的探测。
4 应用效果
新昌电厂卸船机无人接卸系统中,在卸船机大梁中部的位置面向下安装两台激光雷达。为了可以获取整个船舱的三维表面轮廓数据,获取方式是通过大车移动过程中,对船体进行扫描测量。另外,在接卸过程中,为了实时更新舱内的料堆模型,雷达会在抓斗离开船舱向陆侧运行后,实时对舱内进行扫描(图2)。

图2 卸船机雷达布局
4.1 三维激光扫描系统的工作流程
(1)要对整体散货料堆进行扫描,建立初始结构;(2)对目前实时区域进行扫描更新,去计算下次的抓取位置,根据抓斗目前所张开的尺寸搜索区间的递进方向,接下来继续进行区间的遍历扫描,对每个扫描的位置进行评估,得出此时位置的抓取效率的估计值,找到效率最高的一个位置进行取料;(3)对抓取后的局部区域进行模型重建。
总的来说,取得船舱舱口数据并获取船舱内准确的散货物料的三维轮廓和相关抓取点坐标,是实现抓斗卸船机自动抓取的关键所在。根据新昌电厂卸船机自动作业的实际应用,激光扫描系统采集的数据量很大,所以需要先进行滤波、去消除噪声等冗余数据,完成后再进行规范化处理。这样可以快速并且更加准确地进行数据处理,并且消除一定量数据误差。进行以上的数据处理之后,就可以生成DEM 数据,并且根据其进行船舱内部物料的重新绘制,最后可以根据灰度值来判断物料距离的远近。
4.2 常见问题与解决方法
基于DEM 的三维模型重建目前已在新昌电厂卸船机全自动作业的舱内物料分布建模中得到了实际应用,效果良好。工程应用中,以下几点值得注意。
(1)小车在海陆两侧往复运动过程中,因轨道不平等原因,大梁会产生振动,有时幅度较大,雷达点云数据基准会发生小幅偏移,进而对系统建模产生负面影响。软件可以汇总两台雷达的独立数据,降低偏差值。
(2)电厂来煤品种较多,有的煤种煤质不好,抓斗抓取后粉尘升腾飘散,因激光雷达波长与粉尘颗粒尺寸相近,在雷达点云数据中会误判为料堆轮廓,从而对建模结果产生很大干扰。软件可以采用关联滤波等方法,剔除粉尘干扰。
5 结语
实践证明,基于DEM 的三维模型重建技术在卸船机舱内物料分布建模中的应用效果良好,较好地满足了设计要求,同时在实践应用中有效解决了雷达基准偏移和点云数据受粉尘干扰等问题,提高了建模的准确性和还原度,具有较好的工程应用和推广价值。
