在无网状态下的输电线路无人机自主巡检技术研究与应用
2024-03-17朱丹郭本峰王海波常雷雷靳镕光
朱丹 郭本峰 王海波 常雷雷 靳镕光
摘 要:为了解决输电线路无人机巡检工作容易受极端气候影响、远距离操作时效性差、通信稳定性弱等问题,给出输电缆线巡航方法。第一,使用卡尔曼模式明确轨迹,使用垂直模式对通道冗余点实施选择,方便巡航;第二,给予巡航对象差异化的动态飞行路线。以某无网输电线路为案例进行阐述,研究成果说明,给出的方案化解了航路记录与位置明确的难题,在路线探究到自主巡航阶段,兑现无人机自主航行的目标。
关键词:无网状态 输电线路 无人机巡检 技术研究与应用
中图分类号:TM755
Research and Application of the Autonomous Inspection Technology of Unmanned Aerial Vehicles for Transmission Lines in a Grid-Free State
ZHU Dan GUO Benfeng WANG Haibo CHANG Leilei JIN Rongguang
(State Grid Jincheng Electric Power Supply Company,Jincheng,Shanxi Province,048000 China)
Abstract: In order to solve the problems of drone inspection for transmission lines such as being easily affected by extreme climate, the poor timeliness of remote operation and weak communication stability, a curising method for transmission lines is given. First, the Kalman mode is used to clarify the trajectory, and the vertical mode is used to select the redundant points of the path to facilitate cruising. Secondly, differentiated dynamic flight paths are given to cruised objects. This paper takes a certain grid-free transmission line as a case study. and research results demonstrate that the proposed scheme solves the problems of recording routes and clarifying positions, and achieves the goal of the autonomous navigation of unmanned aerial vehicle in the stage from route exploration to autonomous cruise.
Key Words: Grid-free status; Transmission lines; Drone inspection; Technical research and application
伴隨新能源领域的诞生,风能电能常规运用已经提上日程。针对当前无人机的航行情况,对无人机航行进行优化并提高性价比。怎样明确设备切片问题的方位,获得精确而可靠的巡航轨道,是自主巡航的重要课题。
1 无人机测距
无人机测距见图1所示。
无人机巡检,是指无人机携带摄像、红外线传感器等设备,检查传输电线、石油管道是否有接触不良、泄漏等隐患。笔者从方案与实际操作两大层面构建输电缆线上的测距模型并逐渐推算出结果。方案基础上的巡检仅权衡到电缆与摄影机的水平位置即可;而实际操作上,并不限制于既定的缆线状态与摄影视角[1]。
2 试验分析
为检测既定方式的成效,使用大疆Mobile SDK开发自主航行App,并根据220 kV输电缆线特征,先使用无人机获得航线的数据,之后在一定的航线练习模式下完成无人机的航行并记录轨迹情况,通过成果比较建模完成分析。
通过六大试验的轨迹类似数据、结合先后的路况情况的对比,使用该预案能够实现初始轨迹的精准追踪与参数复原。初始轨迹与融合轨迹对比类似,6个试验的平均轨迹类似数据是0.95,超过轨迹类似性的预计平均数据(通常为0.8),这表示在此预案的推行阶段,無人机能够在没有人工干预的情况下辨认路线,进而完成航行。
在确保初始轨迹与结合轨迹有着很高类似度时,使用笔者给出的航线自学模式后,在飞行航线上采集的航点数量相较于人工模式的航点数量降低了50%,规避了大批无效路点的信息搜集,这样不但能够提高巡检效率,节省无人机电能,还有助于扩充无人机巡检范围[2]。
在进行航线飞行阶段,可以给予并佐证巡航对象差别化的动态明确模式。目标设备尽管不处于中心点,然而均包括在既有范畴中,不同设备定位优化前后的调整时间也能够完全明确。
从以上的试验成果能够看到,鉴于巡检对象差别性的动态优化定位模式与标准化工作中巡检设施图画比率的差别,动态调整定位并接纳阈值,在保证目标设施摄影精准率的基础上减少巡检时间,提升巡检效率。
3 激光雷达巡检
激光雷达(Light Detection and Ranging,LiDAR)探测技术是获得3D地理信息的创新技术,可以有效地避免由于风机切片纹理特性不够明显而不能完成图片特性提炼和配置等状况。以激光雷达放射脉冲激光作为勘察信号,假如激光光速照到物体上,通过漫反射将光反射到激光接纳设施。雷达依照发收信号的时间间距与光速相乘再比2,能够换算出发射设备与事物间相距多远。
激光设备根据激光的特征,能够分成单线设施与多线设施。
依照单帧的点云数据,能够获得事物的距离数据;依照若干帧的点云参数,对间距信息实施微分解读,可以得到物体的速率信息。在具体风电使用时,无人机配置360゜多线设备,可以得到风机机身的3维点云数据。
例如:为了去除背景与噪音,能够根据无人机与风机平面水平距离的检测完成无人机巡检[3]。
通过数学模型对离散状况下的波束进行分析。这类波束运算状态下开口大小的遴选对波段具备关键效能,依照设备与风速设备间距得到数据。通过先鼓胀后缩小的计算方法,能够将周围的数据连成一片再排除离散因子进行计算。
4 激光数据解析与路径明确
因为激光设备获得的点云状况难以明确,在三维空间的分布规律有着散乱特征,要运用欧几里得聚合模式对风叶设备进行聚敛并检查风机机身是否完备。校正无人机的方向,保证无人机运转轨迹可以与风机平衡,通过对聚敛后的点云平均数据的解析,能够获得轮毂中央的精准位置,并依照轮毂中央是不是在塔筒来明确偏转视角。
因为风机停转阶段切片位置很难查验,所以必须在无人机位于一定距离阶段依照可见光摄影设备来进行估算。
因为塔筒的装设视角均是不变的,以雷达点云明确风机机身是敏感部件,去除其他数据就是可见光数据[4]。
目前,透视图像只保留风机、轮胎、桶式装备的参数,因此将桶式装备进行分析,换算出风叶和桶式装备间的角度,再运算叶片数据。
5 故障判断与位置明确
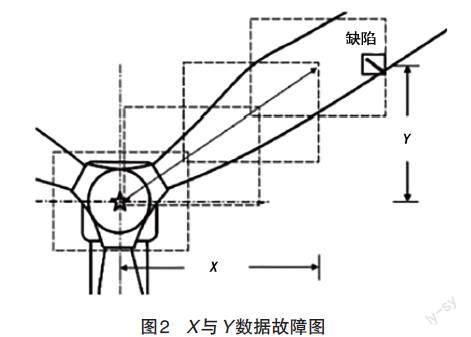
无人机在图像搜集阶段,可以有限定位到风机轮毂位置,并在运转到检查的方位以后,以轮毂为中心进行首幅图片的摄录,之后根据时间与距离顺延到既定位置并对风机进行摄制。在摄制时,飞控会记录当时的位置,并与记录的起始点相减,进而获得图片相较于原始点的实际数据。比如:图像中出现不明确状况阶段,要直接检查故障图像显示的实际数据。因此,此数据反映了图片中央的情况,并且故障与图片中央并不是一致的位置,所以通过图片数据能够对故障粗定位。例如:图2表明,X和Y故障位置相较于原始点的参数,假如把其当作原始位置,那么其和实际方位会出现偏差。
因为要获得更精准的故障方位,必须权衡到故障在图片中的位置。因为图片中央与故障中央在图片坐标系内会有差异。那么,根据图片坐标系和相机坐标系的互换能够察觉,在一定的摄录间距f、无人机与风机平行的位置上,根据透视模式可以运算出具体偏差数值与相关数据。
相机坐标系和图片坐标系间的互换得以实现[5]。
6 无网无人机场景5G和4G网络比较
- 四维装载情况受传送能力影响,上行网络被作用,不能获得清楚图片传送的数据。
- 四维传送能力削弱:骚扰信号不少,极难完成飞行设施的传送。传送时延误时间过长,无法管控指令下达方式;四维伺服器间的互相作用很难实现。
- 涵盖标高下降:四维与五维垂向波束对比,随着标高提升,低空覆盖能力开始被削弱,无法在飞行设施飞行阶段进行覆盖,四维播送通道在垂向位置都智能单波束辐射,垂直位置辐射无法与5G大范围多输入输出的功能相比。5G能够实现天线4波束的覆盖,并且5G的垂直维度波宽超过了4G。
7 无网状态下无人机场景5G网络优势解读
最重要的问题是时延。无人机的智慧与管理(Command and Control)數据服务必须保证低延迟性。并且,高清视频传输也必须尽量降低传输延迟。减少人机传输延迟,可以使用下列模式:第一,互联网网络信号差,要缩减传送间距;第二,无缆线设施可以通过早期调节、免登录调试、信道调节等方法来降低时间延误比例;第三,如果低空辐射,今后运用频率最高的是双模式调频,也可以通过网络加强科技来使延误的比例降低;第四,传送担负网元传送间距与传送时间等任务;第五,伺服器提升参数处置功能,中心网减少数据传输时延等。
8 空域网络巡检
下面来看案例。依次在城乡结合部、普通城市区域两个场所布置3.5GHz频道站点,进行空余覆盖操作,实际巡检情况如下。
8.1 城乡结合部
选择的基站高度达到30 m,天线角度-10°,3.5 GHz频道带宽达到100 Mbit/s,放射功率达到200 W,时间比例是7∶3,3.5 GHz频道覆盖高于6 km,满足25 Mbit/s的高清视频传输要求。
8.2 普通城市区域
基站高度达到78 m,天线角度是-10°,3.5 GHz频道带宽达到100 Mbit/s,放射功率达到200 W,时间比例是7∶3,3.5 GHz低空覆盖距离在150~300 m范畴内,基本满足25 Mbit/s视频传输要求。
各地区巡检可以进行。
巡检结果是,3.5 GHz频道基站在130~300 m间上行速度超过23 Mbit/s比例能够超过96%;另外,3.5 GHz低空巡检到基站3.5 km上行速度超过25 Mbit/s依然可以超过96%,小区半径根据3 km设置。
9 5G无人机组网
传统网络低空覆盖面对的困局具体叙述如下。
第一,互联网地面涵盖线缆难题。事物管控设备与传送合同下,网对网是调试地表辐射的传统电站的,并且必须完成接近地表方位的飞行设备的辐射。所以,会产生缆线难题。五维联动方面,定位缆线出现复杂的坐标点,透过缆线位置相互影响并分离。
在天线零位位置(旁瓣间的距离)基本上不放射无线电波[6]。
比如,假如飞行设备在伺服端所在地域的缆线零位方位,而且被其他地域的设施影响,从而完成切换。因为坐标点会标识缆线位置,这样切换会增加。Toc互联网贴近地表的辐射缆线位置就可以明确。
设备位置辐射地域也许会产生信道转弱的情况,并致使链接失效——这大概是设备执行任务时,信号被骚扰,飞行设备对区域信号强弱实施监督导致。在早期模仿时期,飞行设备设置零号地域为标准位置;过去一定时间后,区域的信号将变得不可测。在飞行设备投入下一个区域前,链接也会失效。
- TOC互联网贴近地表的辐射邻近关系复杂并且很难进行有效整合:由于地面相异标高的最佳接纳效率地域的出现,它会随着标高的变化而出现切换动作。最好的结果是,地表的区域联系方法是容易敲定的延续部分,在本波段中最好的建筑物通常在最接近飞行设备的区域;但是,随着标高的变化,缆线设备数据异常,信号最佳的区域或许不会是最靠近飞行设备的区域。在这种模式下,飞行设备与区域的联系会若断若续,致使邻区关系转变得更为棘手并且极难有效整合。
- TOC互联网低空频段辐射产生时的骚扰。和地表电缆信道比较,天空信道系统会呈现出差异明显的传送情况,高空电缆信道的显著特性包括——高空中缺少阻碍体,肉眼可视较为清楚。比如:飞行设备在天空飞行时,由于视野开阔的概率很难降低,上标波段被很多节点所记录,而且也能够截取很多节点的信号数据,而重复辐射率很高亦会造成骚扰。飞行设备在高空接纳大部分区域的信号,周遭区域的参数超过10条,致使信号骚扰功能被削弱,让飞行设备客户迅速接纳信道并解读。
第四,TOC互联网地表客户和飞行设备间的互为骚扰。比如,联通3.5赫兹频段。当前,此频段通信互联网一般是以地表为传送对象,而且透过调试站点线缆视角等方法对地表辐射设备完成整合,并尽可能解决地域间的互相骚扰难题。贴近地表的飞行设备要运用该频段互联网,一般是通过站点缆线的设备进行,而地表人群一般透过主要设备来体会项目。所以,飞行设备对地表人群的骚扰与地表人群对飞行设备的骚扰是不同的;最关键的是飞行设备对地表人群的上方信道有骚扰;地表人群一般透过上述波段站点完成主瓣辐射,飞行设备贴近地表的项目是透过上述波段旁瓣辐射来进行的;周围地域也是通过旁设备接纳飞行设备的骚扰信号进行。而且,当前的项目情景一般是以单座飞行设备为主,贴近地表飞行设备对地表建筑物人群的骚扰力度较弱。
10 结语
目前,无延迟超清图传送业已被广泛采纳。五维科技为联网飞行设备下的实况超清传送科技和远距离低延迟与巨大的参数处置科技,飞行设备载重效果是立竿见影的,飞行设备的运用模式也会迎来颠覆性的变革。飞行设备科技在各领域都已经体现出本身的优势。五维运用情景透过设备网络向物联网络过渡,并会构建出迅捷、动感、安全、先进的新时代信息基本实施。通信科技与飞行设备结合,是研究飞行设备的大势所趋。
参考文献
[1] 仲林林,胡霞,刘柯妤.基于改进生成对抗网络的无人机电力杆塔巡检图像异常巡检[J].电工技术学报,2022,37(9):2230-2240,2262.
[2] 王鹏,段培勇.基于无人机的重载铁路线桥隧一体化巡检系统架构研究与设计[J].铁道建筑,2022,62(8):29-32.
[3] 谢志文,吴晖.应用机器人轨迹跟踪技术的电力线路无人机智能化巡检系统设计[J].自动化与仪表,2022,37(2):44-49.
[4] 吴圆波,钱晓明,李欣江.无人机正摄影像快速比对工具在输电线路智能巡检中的应用[J].电子巡检,2022(14):85-87.
[5] 罗刚,胡龙江,张山河,等. 500 kV直流输电线路直线塔无人机巡检安全距离仿真与试验研究[J].通信电源技术,2022,39(23):14-16.
[6] 张鹏,张云峰,周政,等.基于5G技术的特高压密集输电通道无人机自主巡检系统的设计与实现[J].中国新通信,2022,24(4):130-132.
