地铁车辆异步电机仿真与直接转矩控制研究
2024-03-16刘国栋余朝刚朱文良
刘国栋,余朝刚,朱文良
(上海工程技术大学 城市轨道交通学院,上海 201620)
0 引言
伴随着经济全球化发展以及中国更深度地参与世界分工,我国城市化进程加快,城市轨道交通成为我国今后发展公共交通的主旋律,为了缓解交通压力,急需加快地铁车辆的研究步伐。
电力牵引系统是城市轨道交通列车的重要组成部分。为保证列车行车安全以及正点运营,牵引系统要根据速度变化、车辆载荷变化、轮轨粘着系数等对牵引力进行精确控制。同时为保证牵引系统可靠性,还需要经常对牵引及其控制系统进行检修。由于城市轨道交通列车牵引系统的好坏直接体现在列车的安全运行性能以及旅客乘坐的舒适程度、人身安全上,牵引系统精准控制在地铁列车中的重要性日益提高[1]。
目前我国城市轨道交通车辆多为三相交流异步电机牵引传动[2],主流高性能控制方案分为矢量控制技术与直接转矩控制技术[3]。文献[4]对成都城轨车辆直接转矩控制方案进行了可行性分析。文献[5]采用恒定负载转矩模拟完整搭建牵引制动控制系统仿真模型,在实际中城轨列车运行时负载转矩是随速度而改变的。文献[6]采用恒定负载转矩搭建城轨列车牵引系统实时仿真模型,与列车实际运行状况不同。本研究以MATLAB 中Simulink 仿真工具建立城市轨道交通交流电力牵引及其控制系统的仿真模型,以异步牵引电机直接转矩控制方法为主要原理,针对其定子磁链轨迹、牵引电机转速、定子电流以及转矩等进行数据分析,最后得出直接转矩控制效果简洁高效试验结论,将有助于我国城市轨道交通车辆牵引技术的发展。
1 轨道车辆牵引系统结构
城市轨道交通车辆交流电力牵引系统主要包括受流装置、牵引变流装置、牵引电机以及制动电阻。轨道车辆交流传动方式原理如图1 所示,受电弓从接触网受流,通过高速断路器、线路接触器、接地检测装置后,将DC 1 500V送入牵引电机控制模块上,逆变成频率电压可调的三相交流电,平行供给车辆4 台交流鼠笼式异步牵引电机,实现对牵引电机的调速,进而控制列车完成牵引、电制动等操作。
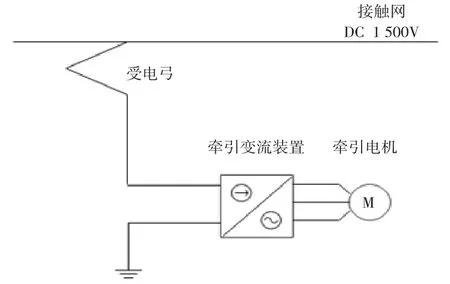
图1 轨道车辆交流传动方式原理示意图
2 圆形磁链直接转矩控制原理及建模
2.1 圆形磁链直接转矩控制基本原理。直接转矩控制(Direct Torque Control,DTC)变频调速是继矢量控制技术之后一种高效简洁变频调速技术,省去传统PWM 信号发生器,更区别于矢量控制旋转坐标的繁琐变换及高度依赖定子与转子参数,DTC 直接利用空间矢量分析模式,在定子坐标系下对异步牵引电机磁链与转矩进行估算与控制,由滞环控制器对逆变器的开关进行高效快速控制,故而得到高动态性能转矩。目前DTC 直接转矩控制由于其系统结构简洁、控制手段直接、动态性能高效等诸多优点成为一种优质异步牵引电机控制策略。
将估计旋转速度与给定旋转速度相比得出给定转矩;将磁链估计与给定磁链进行比较,经由磁滞环比较器得出磁链控制信号;再经转矩调节器将转矩差作滞环处理得到转矩控制信号;根据计算得出的转子位移划分扇区;根据分区以及转矩和磁链控制信号,结合搜索表以获得空间矢量,生成PWM 波;输出给逆变器,给电机供电。
2.2 圆形磁链直接转矩控制模型。采用DTC 直接转矩控制方式来控制三相异步交流牵引电机的转速,进而控制轨道车辆的车速。由图2 可知整个直接转矩控制系统仿真模型主要由主电路仿真模块、磁链和转矩估计模块以及圆形磁链轨迹控制算法构成。各部分搭建成果如图3 所示,图4 为磁链轨迹控制算法内部结构包括磁链与转矩滞环控制及分区选择器。
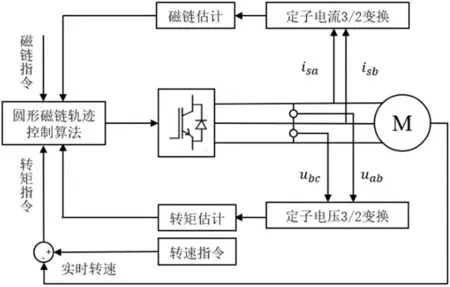
图2 圆形磁链直接转矩控制系统原理框图
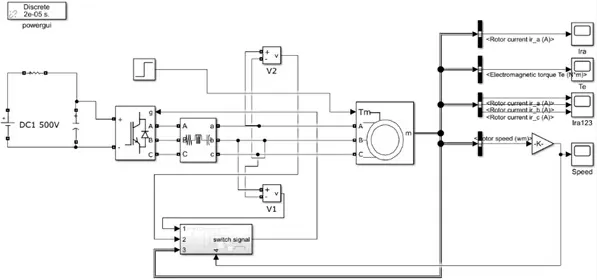
图3 地铁电力牵引系统仿真模型
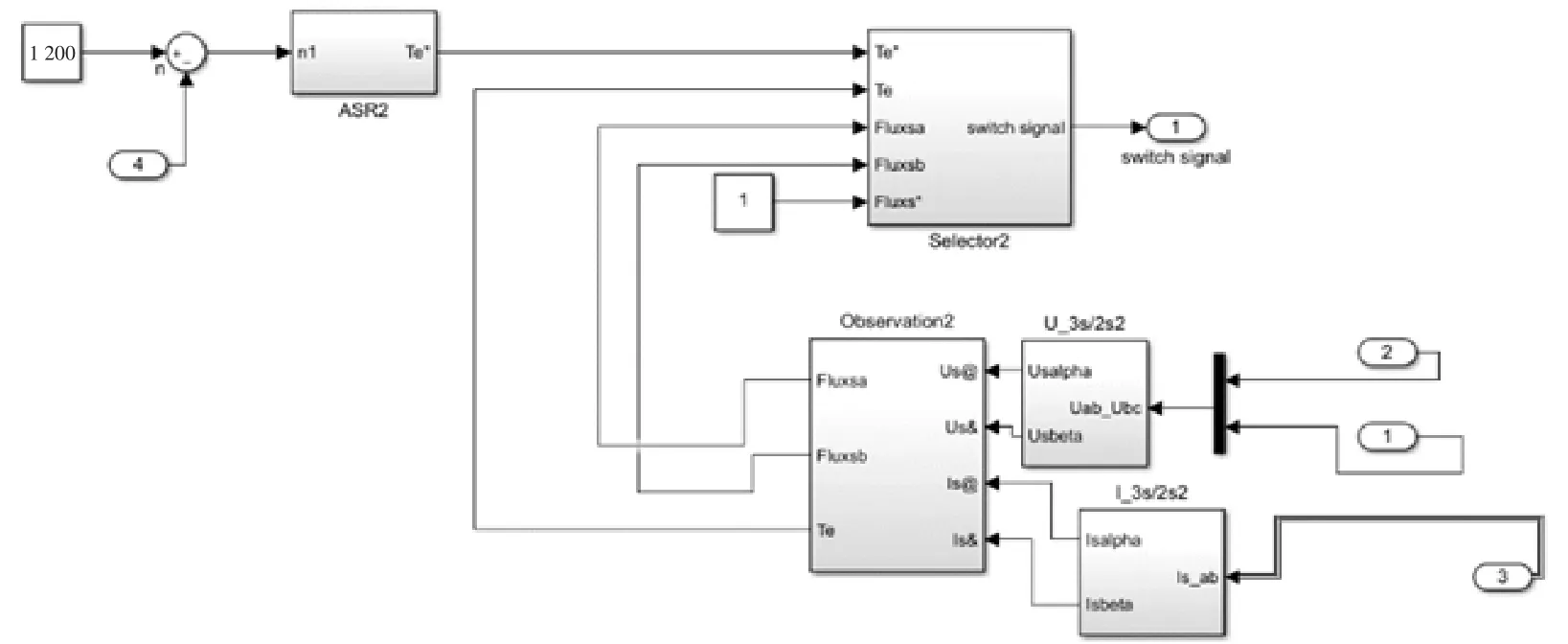
图4 磁链与转矩滞环控制子系统
对于图3 中所示的DTC 仿真模型要求其能够准确反映出DTC 控制特性以及具有高度稳定性,所以有必要对该模型进行必要的仿真波形检验。将检验模型参数设置为:测试时间1s,额定线电压480V;目标转矩63N·m;目标转速550r/min 进行起动测试。
由图5 可以看出,该圆形磁链轨迹DTC 仿真模型中定子磁链无明显畸变,图6 是牵引电机实时转矩迅速稳定到目标值,由图7 中可以看出定子端电流正弦波在趋于稳态过程中,波形亦无明显变形,得证该仿真模型静动态性能良好。
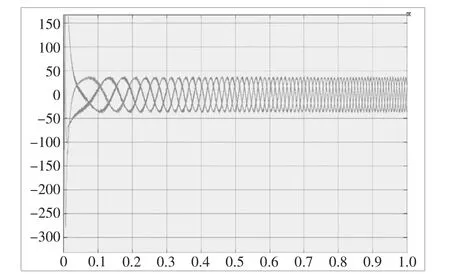
图5 牵引电机定子电流正弦波检验
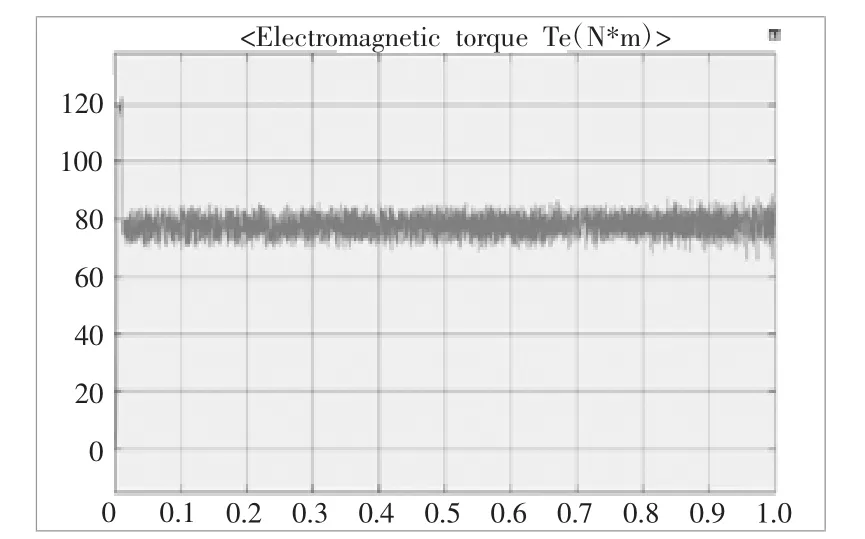
图6 牵引电机实时转矩监测检验
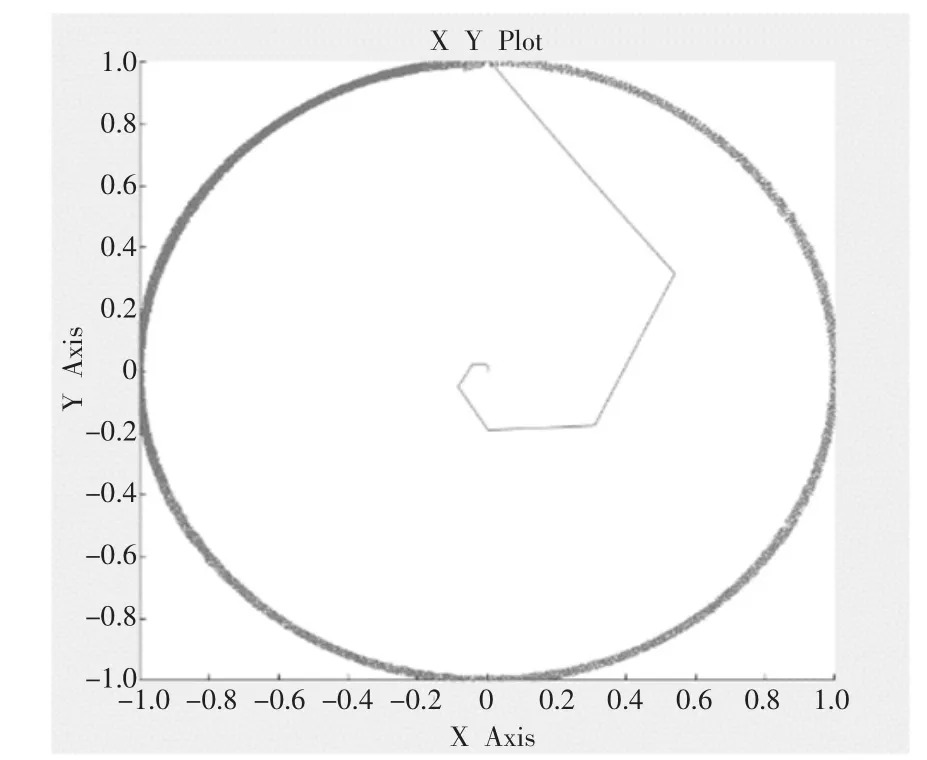
图7 牵引电机定子磁链轨迹检验
3 仿真方案与分析
上海在运某线路城市轨道交通车辆牵引电机的相关参数如表1 所示。设定牵引电机在起动时的目标转速为1 200r/min,牵引电机起动1.3s 后通过阶梯函数向其施加一个大小为70N·m 的负载模拟载客工况,1.5s 后模拟司机控制牵引电机进入制动工况,至此完成一次完整地直接转矩控制牵引电机牵引加速、惰行与制动减速的轨道车辆牵引电机仿真运行过程。仿真过程得到牵引电机定转子磁链轨迹、定转子电流正弦波形、车辆模拟实时转矩输出以及牵引电机实时转速等多种仿真数据,其仿真结果分别如图8 至图11 所示。通过多组直观数据可观察基于该控制方式下系统响应的速度快慢与自调整效果,从而验证该控制方式的稳定性与可靠性。
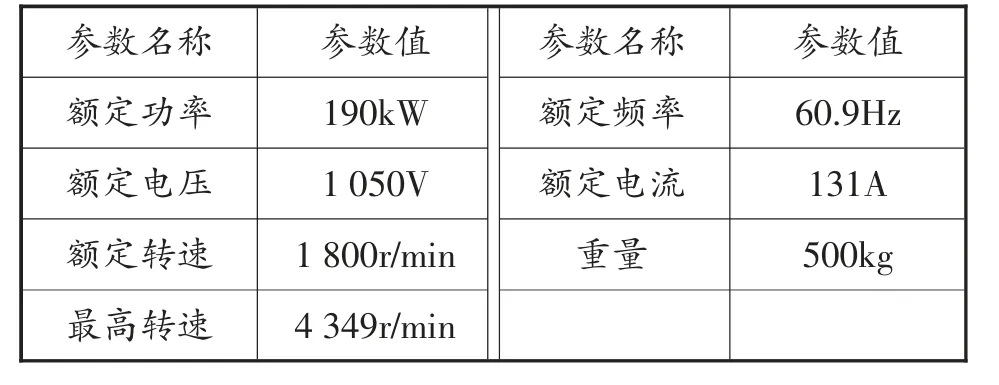
表1 某轨道车辆牵引电机相关参数表
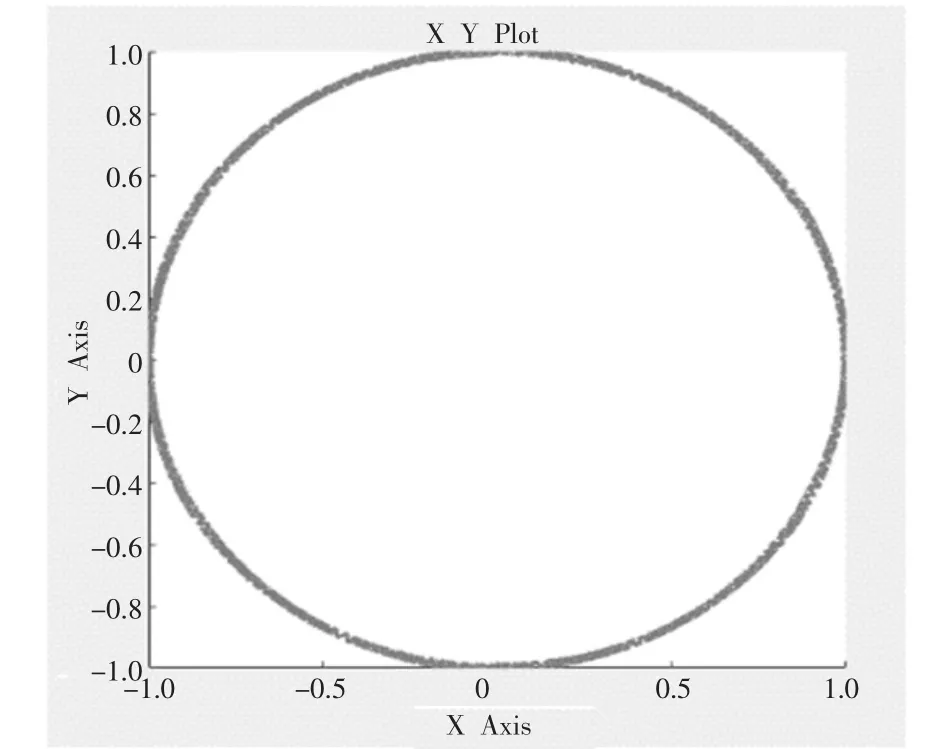
图8 仿真结果-定子磁链轨迹
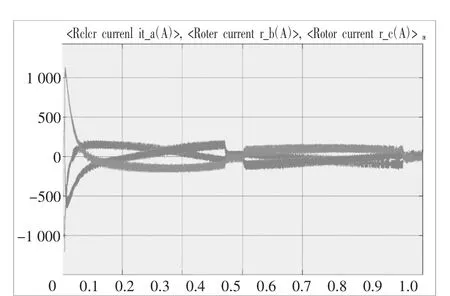
图9 仿真结果-定子电流正弦波形
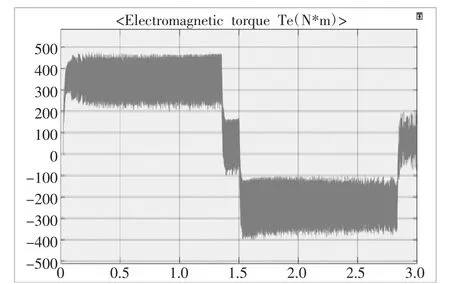
图10 仿真结果-实时转矩输出曲线
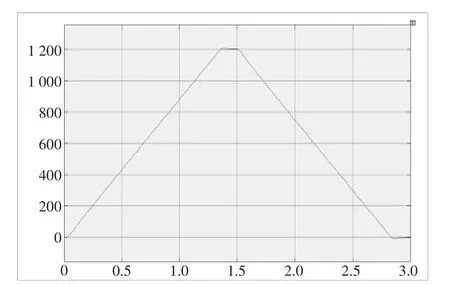
图11 仿真结果-牵引电机实时转速
如图8 所示,牵引电机仿真运行过程中,多种工况下空间矢量幅值的控制效果均显良好,牵引电机磁通变化接近规整圆形轨迹,判定磁通调整效果稳定。图9 定子端电流变化趋势与图10 实时转矩变化趋势基本吻合,整个变化过程依照三种不同工况分为明显的三段式,当牵引电机空载起动时,牵引电机转矩迅速响应上升并达到稳定输出;在1.3s 增加模拟列车负载时,转矩再次迅速响应调整;在1.5s 迅速响应进入制动工况,实时转矩输出也随之变化直至2.85s 时牵引电机转速降为零时输出转矩也回归零线。完整仿真过程中定子端三相电流正弦波形即逆变器输出线电流三弦波形均呈稳定效果。
4 结论
通过对城市轨道车辆牵引电机直接转矩控制方法的研究,基于MATLAB/Simulink 软件搭建了一套完整的DTC 三相异步牵引电机仿真模型,并在此模型基础上完成牵引电机处于牵引、惰行以及制动工况的仿真与分析。通过定子磁链及转矩响应验证了所搭建模型的可行性与稳定性。定子端电流正弦图形规律、定子磁链收敛为规整圆形、转矩控制及时响应,牵引电机稳定运行等多项仿真结果表明,采用直接转矩控制方式控制的牵引电机对于要求高效稳定快速的城市轨道交通牵引制动系统来说既高效又快捷。
