面向突发性水污染事件的多传感器动态组网立体监测
2024-03-12申邵洪陈希炽向大享文雄飞
申邵洪,姜 莹,陈希炽,向大享,陈 喆,文雄飞
(1.长江科学院 科研计划处,武汉 430010; 2.长江科学院 武汉市智慧流域工程技术研究中心,武汉 430010;3.长江科学院 空间信息技术应用研究所,武汉 430010)
0 引 言
为了推动新阶段水利高质量的发展, 水利部正在加快推进智慧水利建设工作。 在突发性水污染应急处置方面, 需要集成不同时空分辨率的航空、 航天和无人机低空遥测平台与地面水环境观测技术, 搭建高时效、 高精度“天空地一体化”水污染移动立体监测平台, 实现水污染事件智慧化模拟分析[1-3]。
随着对地观测技术的不断发展,应急监测已从传统单一的地面监测发展到“天空地一体化”监测网的新阶段,观测任务对时效性、准确性及时空覆盖有更高的要求[4]。对地观测传感器的种类和数量不断增多与丰富,但同类或异构观测平台之间如何高效配合,仍然是一个难题。突发性水污染事件发生后,天基、空基、陆基观测各具优势,污染发生时、动态演变过程中和后期等不同阶段具有不同的观测需求,急需建立多传感器动态组网方法,实现观测平台间的互补观测和应急协同[5-7],以满足应用需求。
突发性水污染事件应急监测任务对时效性、准确性以及时空覆盖有更高的要求。相比于单一传感器监测,多传感器协同在时空覆盖范围、观测系统的鲁棒性、信息的可靠性和准确性、资源重复利用效率等方面具有重要优势[8-9]。多传感器需要不同层次、不同角度监测平台之间的高效配合,充分发挥天基、空基、陆基、水基监测平台的优势,根据突发性水污染事件的动态演变,构建基于事件时间、空间与需求参数集的立体监测模型,从模型的监测实效性能、空间覆盖性能以及监测性能等角度出发,实现高效动态组网监测。
本研究立足于当前水资源应急监测领域的学术前沿,系统研究了面向突发性水污染事件应急监测感知网的动态组网理论与方法,深入开展智慧化模拟分析。
1 多传感器立体协同监测模型
1.1 多平台多传感器立体协同监测模型
假设需要突发性水污染应急监测的事件为E,描述事件的属性分别为事件时间属性T、事件空间属性S和事件需求属性P。一旦事件发生,事件即具有时间与空间属性,时间属性T表示事件发生的时间或需要被监测到的时间参数,可以为一个瞬时时刻或一个时间间隔;空间属性S描述事件发生的位置和空间分布特征;而事件需求属性P是事件监测的一系列需求参数集合。建立事件模型:
E=E(T,S,P) ;
(1)
T={Ts,Te} ;
(2)
S=(Xi,Yi,i),i=1,2,…,n;
(3)
P={p1,p2,…,pk} 。
(4)
式中:Ts、Te分别为监测任务的时间起点与终点;S为空间参数,表示需要监测的空间范围,是由n个点坐标组成的有限边界区域;P为需要满足的k个监测需求参数的集合,包括对事件进行监测的平台需求、传感器需求、监测分辨率需求、气象需求、成本需求,以及根据监测事件的需求设置其他参数等。不同T与S条件下,事件模型的监测需求参数P也会不同。
以河湖突发性水污染监测为例,通常需要卫星、无人机、地面、水上平台的协同监测,多传感器协同立体监测的平台可以定义为
α={αi,i=1,2,3,4} 。
(5)
式中i为平台类别,分别为卫星(空基)、飞机或无人机(天基)、地面传感器平台(陆基)、监测船(水基)。
根据对河湖水污染事件监测任务的建模,平台具备如下3个属性:
(1)监测时间属性Tα,包括平台αi监测时间窗Ti与协同时间状态标记MTi,即:
Ti={Tis,Tie} ;
(6)
(7)
式中Tis、Tie分别为平台αi监测时间窗的起点与终点。
如果平台αi监测时间窗口与式(1)中事件的时间重合,则平台αi可以在事件E的T时间段内运行。MTi=0表示不能执行监测任务,MTi=1表示可以执行监测任务。
(2)监测空间属性Sα,包括平台αi的监测性能Si与协同时间状态标记MSi,即:
Si=(Xil,Yil,Zil),i=1,2,…,n,
l=1,2,…,m;
(8)
(9)
式中:Si为由m个点坐标组成的有效边界区域;Xil、Yil、Zil分别为对应的点坐标参数;MSi=1表示平台αi的监测范围与事件E的空间属性S存在交集,即平台αi对事件E有监测覆盖,否则MSi=0。
(3)监测性能属性Pα,包括平台αi监测性能Pi与协同状态标记MPi,即
Pi={pi1,pi2,…,pik} ;
(10)
MPi=MPi1MPi2…MPij;
(11)
(12)
式中Pij为描述平台αi监测性能的j项参数,包括搭载的传感器参数、监测数据类型参数、监测数据分辨率参数等。当Pij∈P,即平台αi具有获取当前事件监测第j项需求参数的能力时,MPij=1,否则为0。
动态组网监测通过空天陆水多源监测平台协同监测,实现对水污染事件E的最大效益化监测。
由于各个平台均可能获取该平台对事件的监测信息,且各平台相互之间联系并不紧密,因此,监测任务的协同在现有平台资源条件下,以满足监测需求为第一准则,实现对事件的协同监测。根据事件发生的时间、空间与需求参数集合、各平台的监测属性,以及不同监测平台的约束条件,建立协同组网监测模型的目标函数为:
1.2 多传感器立体监测协同求解
协同求解过程如图1所示,首先构建立体监测事件模型E=E(T,S,P),将事件E的T、S、P参数作为协同任务的时间集合、空间集合与监测需求集合,进行集合求解,获得协同平台对应的T、S、P参数。
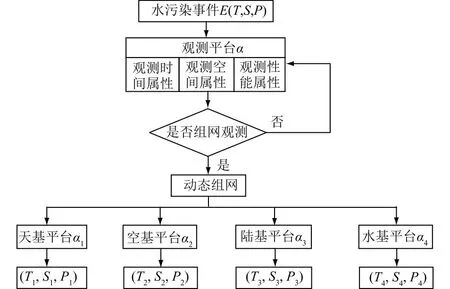
图1 多传感器协同水污染立体监测求解流程
具体步骤如下:
(1)根据监测需求构建事件监测模型E(T,S,P),并利用T、S、P参数求解平台αi是否可以协同监测的标记矩阵Mα,即
(14)
当MTiMSiMPi=1(i=1,2,3,4)时,平台αi进入协同监测状态。
(2)确定协同监测的平台启用的优先级λα=[λ1,λ2,λ3,λ4],λi∈(0,1),平台可监测时间窗离事件E监测时间窗T越近,则优先级越大,优先启用。权值大的平台对应的T、S、P参数作为下一级权值低的平台T、S、P确定的依据。
(3)选取优先级最大即λi=max(λα)的平台αi,计算该平台在事件E(T,S,P)建模条件下的Eαi(Ti,Si,Pi),Eαi(Ti,Si,Pi)⊆E(T,S,P)为平台αi在协同任务中的输出,将λi从λα中移除。
(4)将剩余任务E(T,S,P)-Eαi(Ti,Si,Pi)赋予步骤(3)中剩余平台里权值最大的平台αi,计算该平台在事件E(T,S,P)-Eαi(Ti,Si,Pi)条件下的输出Eαi(Ti,Si,Pi)。
(5)重复步骤(3)、步骤(4),直至任务事件E(T,S,P)完全被执行或4类平台全部调用完毕。
1.3 协同类型与模型效益评价
根据事件监测任务的建模,平台之间的监测协同可分为时间协同、空间协同、监测性能协同。
定义1(时间协同):对于监测事件E,参与协同的平台∀αi∈α、∀αj∈α,满足Ti⊆T、Tj⊆T且Ti≠Tj,则平台为时间协同监测。
定义2(空间协同):当平台αi、αj接收到的空间参数满足Si⊆S、Sj⊆S且Si≠Sj,平台αi、αj为空间协同监测。
定义3(监测性能协同):当平台αi、αj满足Pi⊆P、Pj⊆P且Pi≠Pj,平台αi、αj为监测性能协同。
2 多传感器动态组网立体监测模拟分析
2.1 丹江口水库基本情况
丹江口水库位于汉江中上游, 地处湖北、 河南和陕西三省交界处。 丹江口库区地理位置处于32°36′N—33°48′N、110°59′E—111°49′E之间,水库横跨豫鄂两省,控制流域9.5万km2。丹江口水库一期工程于1973年建成,设计蓄水位157 m,防洪限制水位149 m;2014年二期大坝加高工程调水后,正常蓄水位从157 m抬高到170 m,库容从174.5亿m3增加到290.5亿m3,新增淹没区面积达307.7 km2。
2.2 多平台多传感器水污染立体监测网
丹江口库区水污染立体监测网络由天基、空基、陆基和水基监测平台构成,其中:①天基平台包括高分辨率和高光谱卫星;②空基平台包括无人机;③陆基平台包括水质监测实验室;④水基平台包括应急水质监测船和水质自动监测站等。各平台的监测参数及其特点如表1所示。
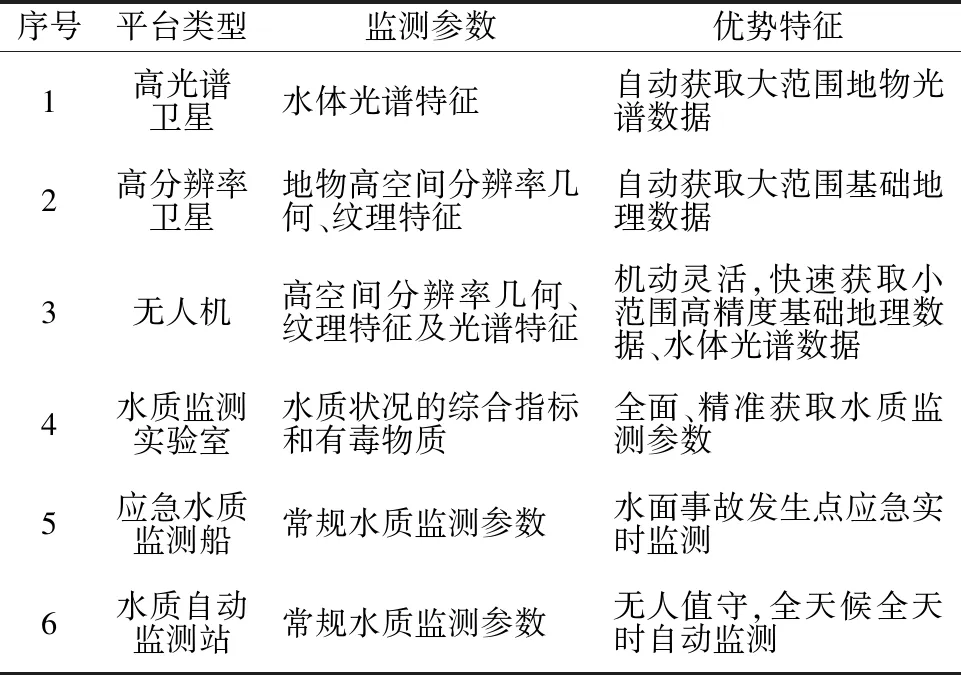
表1 水污染立体监测网各平台参数及特点
2.3 应急监测条件下的多传感器立体协同监测分析
2.3.1 多传感器立体协同监测构建
以丹江口库区某支流突发水污染事件为例,如图2所示,采用多传感器立体协同监测获取水污染事件发生地点、污染范围、水质污染总体状况、事故点上下游河段的基础地理条件。

图2 库区某支流假设水污染突发区域
在水污染事件应急监测过程中,按照污染事件发生时、动态演变过程中以及事件后期3个阶段,分别构建观测事件,采用式(1)建立事件模型E(T,S,P),开展多传感器动态组网和协同观测分析。
2.3.1.1 水污染事件发生时
监测需求:获取突发水污染区域1 km范围内且事件发生后72 h内空间分辨率优于20 cm的航空影像,及时获取污染物类型信息和实时、精准的水质监测数据。
根据监测需求,分别构建E1和E2事件,开展多传感器协同观测分析。即E1=E1{T=[T0,T0+72 h],S=(事故发生点半径1 km),P={p1=空间分辨率优于20 cm多光谱真彩色影像}},其中T0为事件发生时间。
将观测事件参数按照式(14)开展协同求解,获得协同观测平台的标记矩阵为

E2=E2{T=[T>T0],S=(事故发生点半径50 m),
P={p1=污染物类型,p2=精准水质参数}}。
按照式(14)开展协同求解,获得协同观测平台的标记矩阵为

2.3.1.2 事件演变过程中
监测需求:即获取事件发生区域5 km范围内30 d内空间分辨率优于2 m的多光谱真彩色影像,获取事件发生区域5 km范围内实时精准的水质监测数据和水位、流量以及空间分辨率优于5 m的水下地形数据。
根据监测需求,分别构建E1、E2和E3事件,开展多传感器协同观测分析。即
E1=E1{T=[T>T0+30 d] ,
S=(事故发生点半径5 km) ,
P={p1=空间分辨率优于2 m多光谱真彩色影像}}。
获得协同观测平台的标记矩阵为

E2=E2{T>T0,S=(事故发生点半径5 km),P={p1=水质参数,p2=水位、流量等水文参数}}。
获得协同观测平台的标记矩阵为
E3=E3{T=[T0+2 d],S=(事故发生点半径5 km),P={p1=空间分辨率优于5 m的水下地形}}。
获得协同观测平台的标记矩阵为
2.3.1.3 水污染事件后期
监测需求:获取事故发生点半径500 m内水质监测数据(常规7参数:COD、氨氮、总磷、总氮、色度、浊度、悬浮物)。
根据监测需求,构建E1事件,开展多传感器协同观测分析。即
E1=E1{T=T0,S=(事故发生点半径500 m),
P={p1=常规水质监测7参数}}
获得协同观测平台的标记矩阵为
2.3.1.4 水污染事件全过程多传感器协同组网分析
对突发性水污染事件发生时、动态演变过程中以及事件后期3个阶段观测事件的构建与协同观测平台求解,需要多平台协同组网,涉及卫星(空基)、飞机或无人机(天基)、地面传感器平台(陆基)、监测船(水基)。动态演变过程中,卫星与飞机、无人机均为可用状态,综合考虑协同监测任务中监测性能、时效性、空间覆盖性能、监测费用等多项因素,采用协同组网监测模型的目标函数(式(13))进行优化分析、求解,获得时空-观测性能协同模式为
即无人机(天基)、地面传感器平台(陆基)、监测船(水基)3个平台开展协同监测效益最高,各平台监测效益如表2所示。
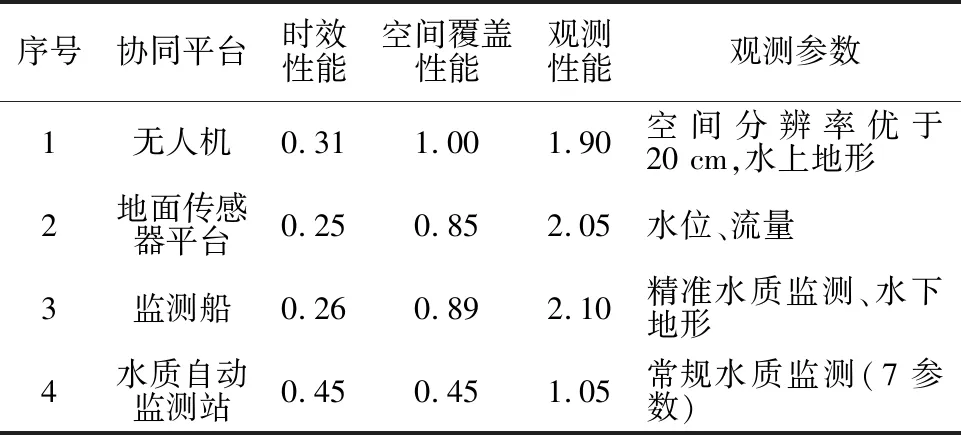
表2 多传感器时空协同观测性能效益分析
由表2可知,无人机空间覆盖性能可实现完全覆盖,且时效性达0.31,观测性能达1.90,能满足丹江口支流突发水污染事件发生时观测性能需求;地面传感器空间覆盖性能为0.35,时效性能0.25,观测性能2.05,能满足水污染演变过程局部的水位、水量观测需求;监测船空间覆盖性能0.26,时效性能0.39,观测性能2.10,能满足污染后期精准水质监测、水下地形的观测性能需求。
3 结 论
面向突发性水污染事件,构建了“天空地一体化”水污染立体移动监测平台,并基于多传感器立体协同监测模型,深入开展了天基、空基、陆基和水基等不同平台传感器协同组网监测研究。选择丹江口水库库区某支流为试验区域,在突发水污染事件的情况下,面向事件发生时、演变过程中和事件后期多个阶段,根据不同阶段监测需求的变化,构建多传感器协同观测事件,深入开展多传感器协同观测分析。结果表明多传感器立体监测网能够协同、高效获取水污染应急处置所需的监测数据,能够动态、准确开展水污染模拟分析,可以准确、及时支撑突发性水污染事件的应急处置工作。