轻小型高精度机载稳定云台设计与研究
2024-03-11于昊天冶竣峰尤钱亮
袁 辉,于昊天,冶竣峰,尤钱亮
(南通智能感知研究院,江苏 南通 226007)
随着无人机应用场景越来越丰富,机载光学遥感仪器的应用日益增多,光学遥感仪器通过无人机挂载对地面目标物体进行推扫光谱成像。无人机飞行过程中,风载荷扰动和无人机本体振动会直接传递到光学遥感仪器,影响其图像采集质量。为了提高图像采集质量,配置机载稳定云台的必要性和重要性愈发突出。由于无人机起飞载重有限,因此对轻小型稳定云台的要求较高,只有稳定云台的质量占比小、留给光学遥感仪器的质量充足,才可以满足高性能光学遥感仪器对成像稳定性的要求。本文主要对一款轻小型、高稳定精度的无人机载稳定云台进行设计与研究,从而满足机载光谱仪对成像稳定性的要求[1-4]。
1 结构设计
1.1 整机方案
机载云台由减震组件、航向轴组件、横滚轴组件、俯仰轴组件及载荷安装座组件组成,如图1、图2所示。机载云台的三轴调节结构可灵活调节光谱仪重心。减震组件通过螺栓与无人机相连;航向轴组件与减震组件可通过单轴滑动调节整机重心;横滚轴组件与航向轴组件通过关节直驱电机进行转动连接,配合结构硬限位及滑动连接,可实现横滚轴臂单轴滑动调节和X轴方向重心调整;俯仰轴组件与横滚轴组件通过关节直驱电机转动连接,配合结构硬限位及滑动连接,可实现俯仰轴臂单轴滑动调节和Y轴方向重心调整;载荷安装座实现光谱仪与俯仰轴的连接,同时载荷安装座设计有滑动机构,可实现单轴滑动调节和Z轴方向重心调整。整个云台通过在X轴、Y轴、Z轴3个方向的重心调节,可以实现云台及载荷的重心与无人机重心的匹配,保障无人机飞行稳定[5-6]。
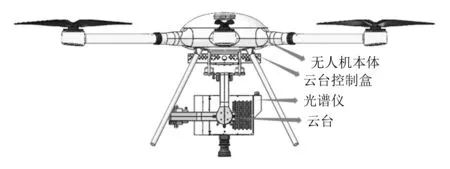
图1 云台整机系统示意图
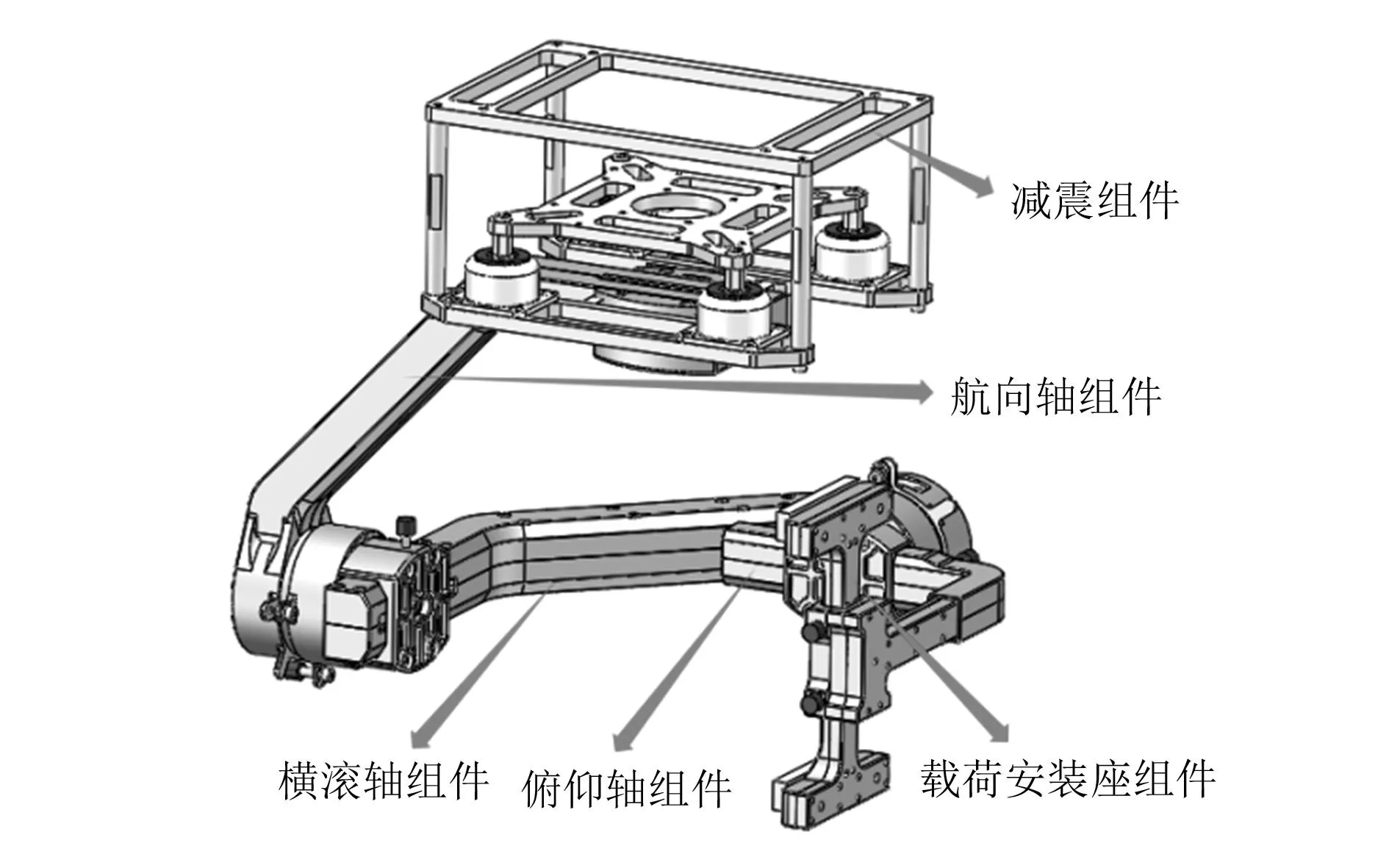
图2 云台总装示意图
1.2 减震组件设计
如图3所示,减震组件由无人机转接板、加高柱、减震座、航向轴安装板、减震转接板组成,各零件之间通过螺钉连接。云台控制盒安装在航向轴安装板上方,4个减震座可以实现20千克级挂载、能够隔离无人机的高频振动对云台稳定性的影响[7-9]。
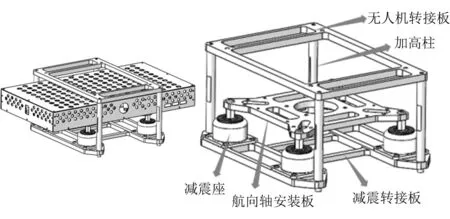
图3 减震组件示意图
1.3 航向轴组件设计
如图4所示,航向轴组件由航向臂、航向臂锁紧块、航向臂滑动座、横滚臂滑动底板、横滚电机组成。航向臂在航向臂滑动座内通过单向滑动调整载荷重心,调整到位后通过锁紧块将航向臂位置固定;航向臂为对开式内部镂空减重结构,可保障足够刚度和较小的质量;航向臂末端与横滚电机定子固连,横滚电机转子上安装的横滚臂滑动底板用于安装横滚轴组件,横滚臂滑动底板上设置的结构硬限位可确保横滚电机只能转动一定的角度,防止过度转动损坏载荷。
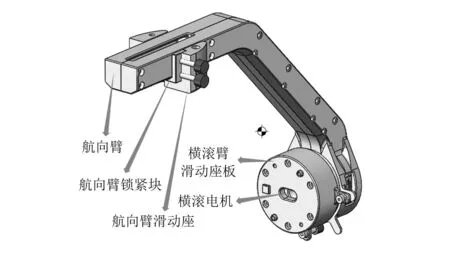
图4 航向轴组件示意图
1.4 横滚轴组件设计
如图5所示,横滚轴组件由横滚臂、横滚臂锁紧块、横滚臂滑动座、俯仰臂安装座、俯仰电机组成。横滚臂通过在横滚臂滑动座内单向滑动调整载荷Z轴方向重心,调整到位后通过锁紧块将横滚臂位置固定。横滚臂为对开式内部镂空减重结构,可保障足够刚度和较小的质量。横滚臂末端与俯仰电机定子固连,俯仰电机转子上安装的俯仰臂滑动底板用于安装俯仰轴组件。俯仰臂滑动底板上设计的结构硬限位,可确保俯仰电机只能转动一定角度,防止过度转动损坏载荷。
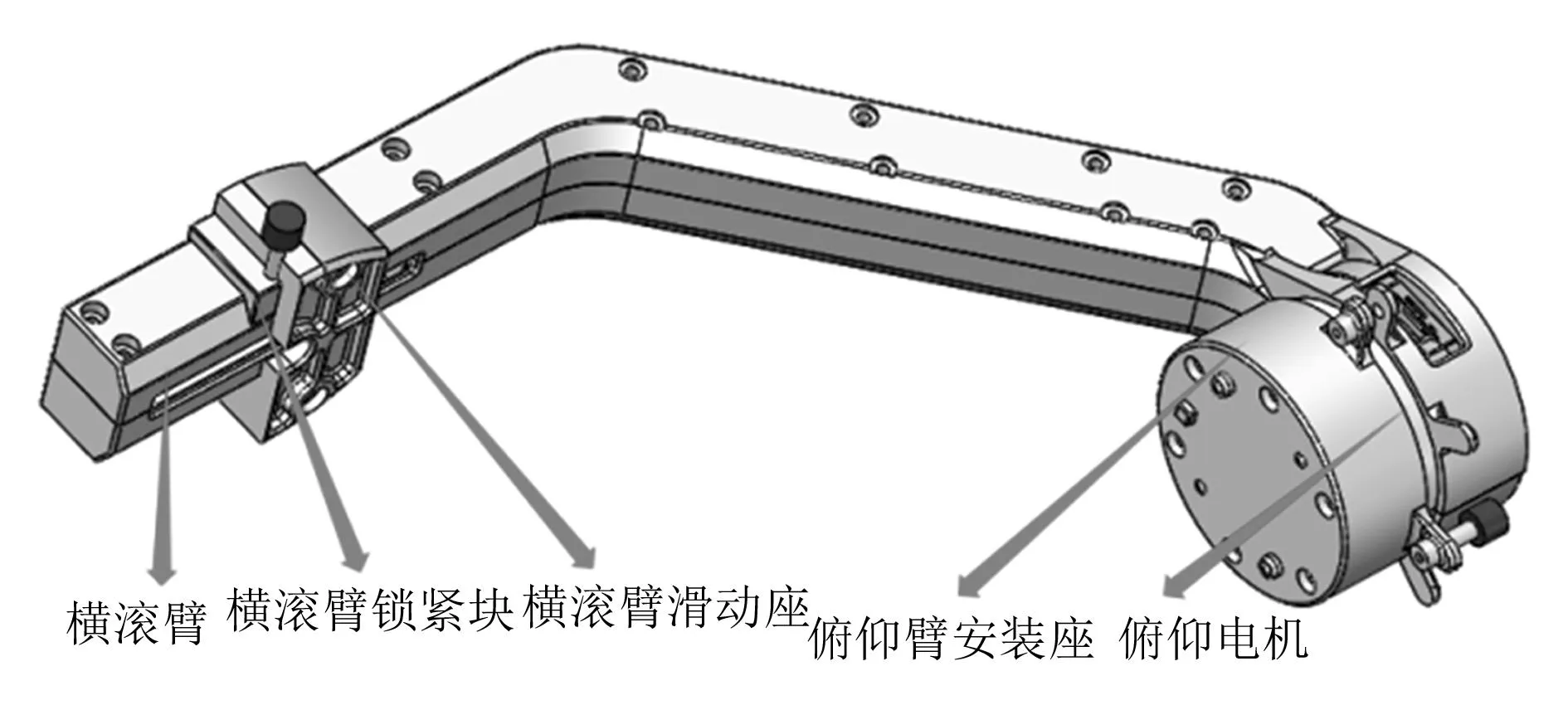
图5 横滚轴组件示意图
1.5 俯仰轴组件设计
如图6和7所示,俯仰轴组件由俯仰臂、俯仰臂锁紧块、俯仰臂滑动座、载荷安装座组成,载荷安装座由工字型载荷安装座、载荷滑动座、载荷座锁紧块、滑动座压盖组成。俯仰臂、载荷滑动座、工字型载荷安装座为对开式内部镂空结构,可保障足够的结构刚性和较小的质量。俯仰臂在俯仰臂滑动座内通过单向移动来调整载荷Y轴方向重心,调整到位后通过锁紧块将俯仰臂位置固定;工字型载荷安装座通过螺钉与光谱仪固连,通过载荷滑动座可实现光谱仪Z轴方向重心调节,位置调整到位后通过载荷座锁紧块固定位置。

图6 俯仰轴组件示意图

图7 载荷安装座示意图
2 静力学仿真分析
2.1 航向轴静力学分析
云台结构件材质均为6061铝合金,如图8所示,为减少有限元计算量,光学载荷、俯仰轴、横滚轴等零部件根据实际质量和质心位置在横滚轴关节直驱电机端面上添加质量点,根据实际挂载情况添加约束。通过分析计算可知航向轴变形量最大为0.111 mm、应力最大为31.28 MPa,变形量和应力均满足材料许用要求及云台功能要求[10-13]。

图8 航向轴静力学分析
2.2 横滚轴静力学分析
如图9所示,为减小有限元计算量,光学载荷、俯仰轴等零部件根据实际质量和质心位置在俯仰轴关节直驱电机端面上添加质量点,根据实际挂载情况进行约束添加和重力添加。通过分析计算可知航向轴变形量最大为0.139 mm、应力最大为15.741 MPa,变形量和应力均满足材料许用要求及云台功能要求。
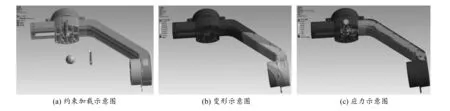
图9 横滚轴静力学分析
2.3 俯仰轴静力学分析
如图10所示,为减小有限元计算量,光学载荷根据实际质量和质心位置在载荷安装座端面上添加质量点,根据实际挂载情况进行约束添加和重力添加。通过分析计算可知航向轴变形量最大为0.626 mm、应力最大为29.069 MPa,变形量和应力均满足材料许用要求及云台功能要求。

图10 俯仰轴静力学分析
3 动力学仿真分析
3.1 俯仰轴动力学分析
如图11所示,俯仰轴组件通过载荷安装座连接光学遥感仪器(光谱仪),整个俯仰轴组通过载荷安装座上下调节机构、俯仰臂左右调节机构将组件的质心与俯仰轴回转中心重合。在三维软件SolidWorks中对俯仰轴添加±30°位移驱动,可得出俯仰轴角速度、角加速度及力矩的峰值分别为60(°)/s、284(°)/s2、419.6 N·mm(图12),仿真结果均在俯仰轴关节直驱电机的使用范围内,满足云台使用要求。

图11 俯仰轴带负载示意图
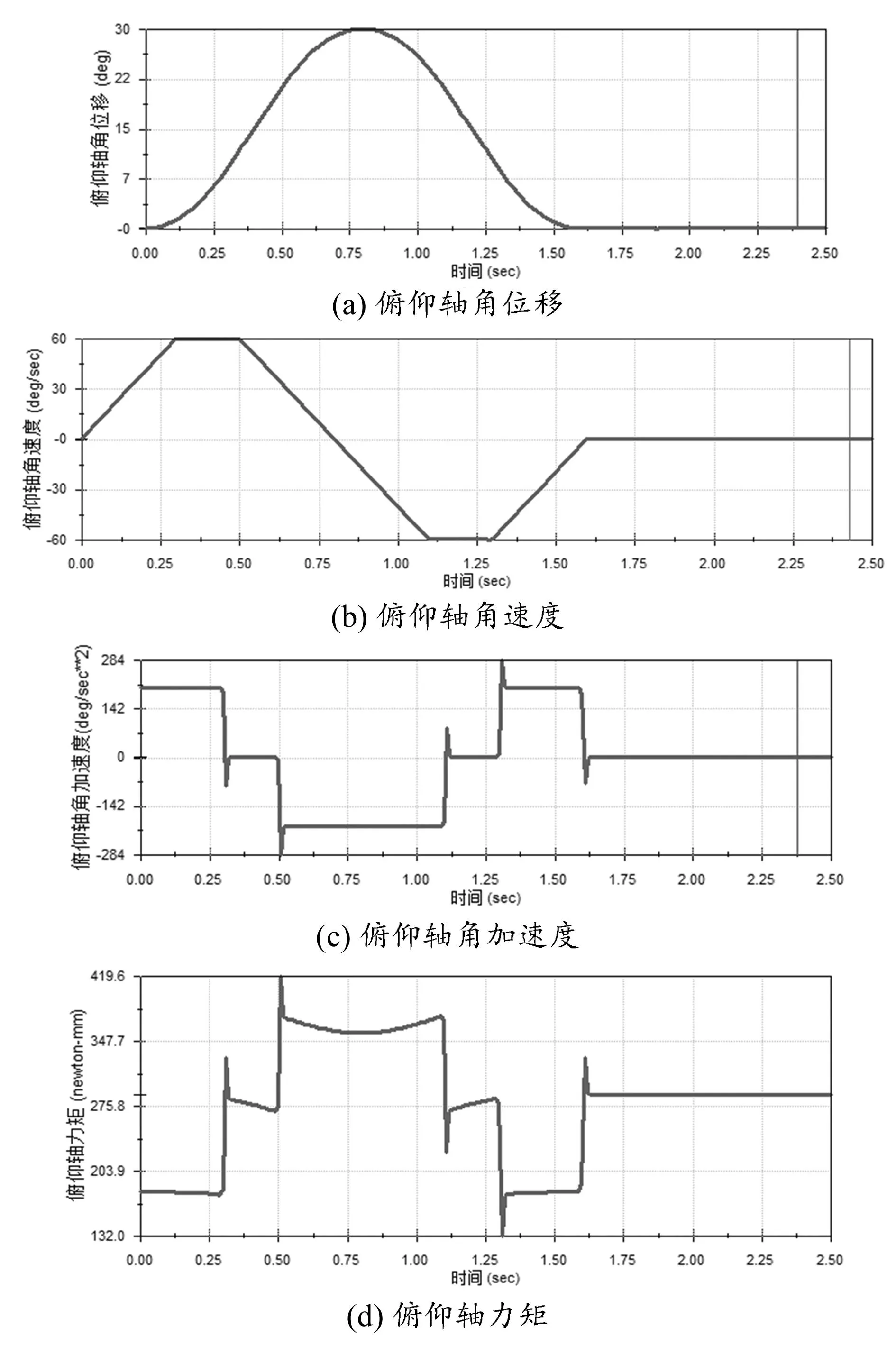
图12 俯仰轴动力学分析
3.2 横滚轴动力学分析
如图13所示,俯仰轴组件、光学遥感仪器(光谱仪)、横滚轴组件三者质心已通过横滚臂调节机构调到与横滚轴回转中心重合。在三维软件SolidWorks中对俯仰轴添加±30°位移驱动,可得出俯仰轴角速度、角加速度及力矩的峰值分别为60(°)/s、284(°)/s2、407 N·mm(图14),仿真结果均在横滚轴关节直驱电机的使用范围内,满足云台使用要求。
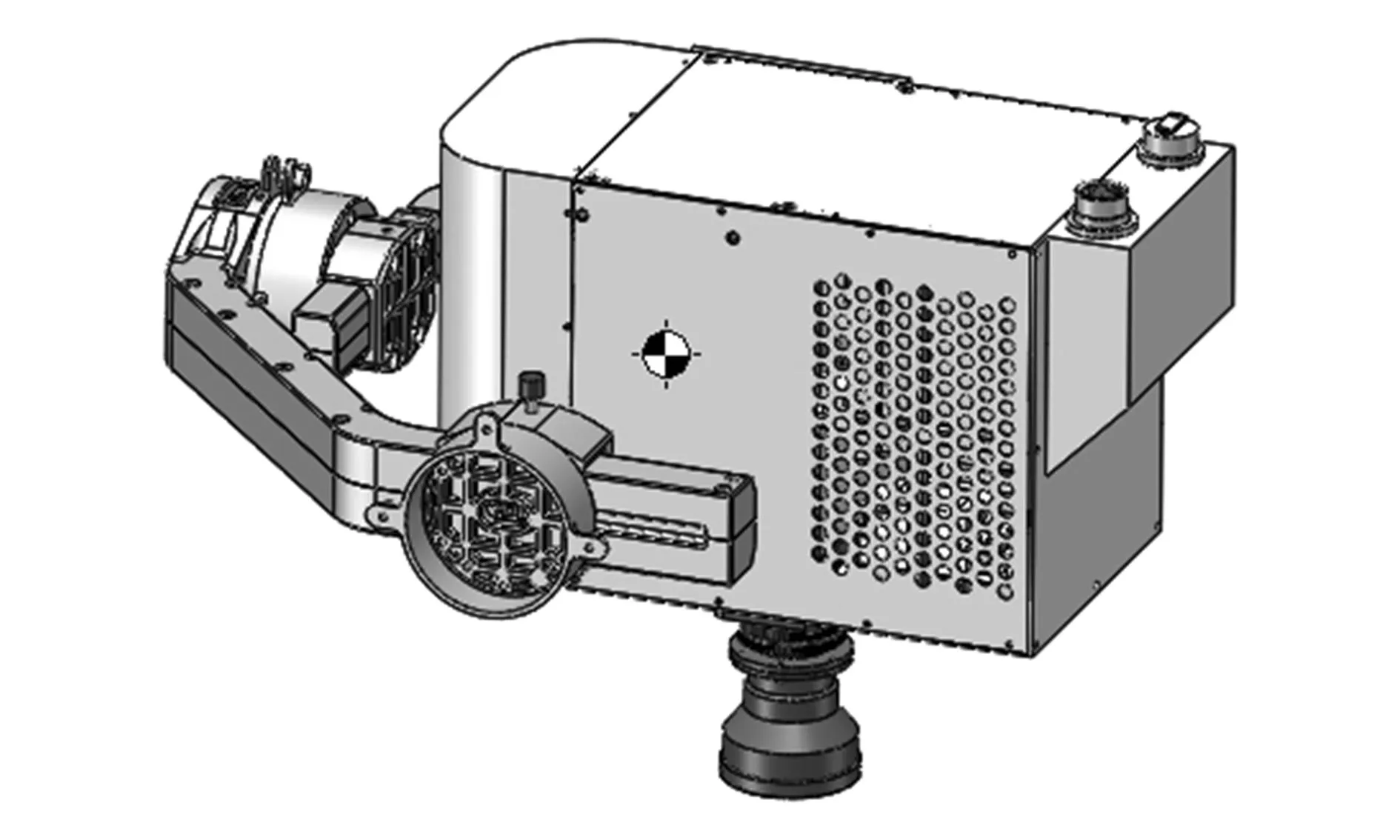
图13 横滚轴带负载示意图
4 样机组装及挂飞
如图15所示,经过设计、加工和组装,云台已与光学遥感仪器(光谱仪)、无人机实现了集成,并完成了室外挂飞试验。光谱仪内部集成了陀螺仪,光谱仪与云台末端的载荷安装座固连,陀螺仪的姿态数据即是云台末端的姿态。光谱仪通过无人机配合云台推扫成像的过程中,要保障光谱仪的望远镜窗口与地面时刻保持平行。受气流扰动和无人机本体振动的影响,光谱仪的望远镜窗口与地面间的平行度时刻处于波动中。
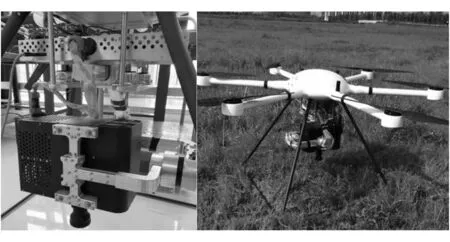
图15 云台样机及挂飞示意图
如图16所示,云台根据陀螺仪记录的姿态变化量控制俯仰轴和横滚轴关节直驱电机动作、修正姿态,保证望远镜窗口尽量与地面平行,减少光谱仪在一个积分时间内成像的几何畸变、增强光谱仪的成像效果。如图17、图18所示,云台外场试验采集的俯仰轴和横滚轴在一个积分周期(12 ms)内的摆动角度达到了0.015°(即稳定精度),满足了光谱仪成像质量要求。
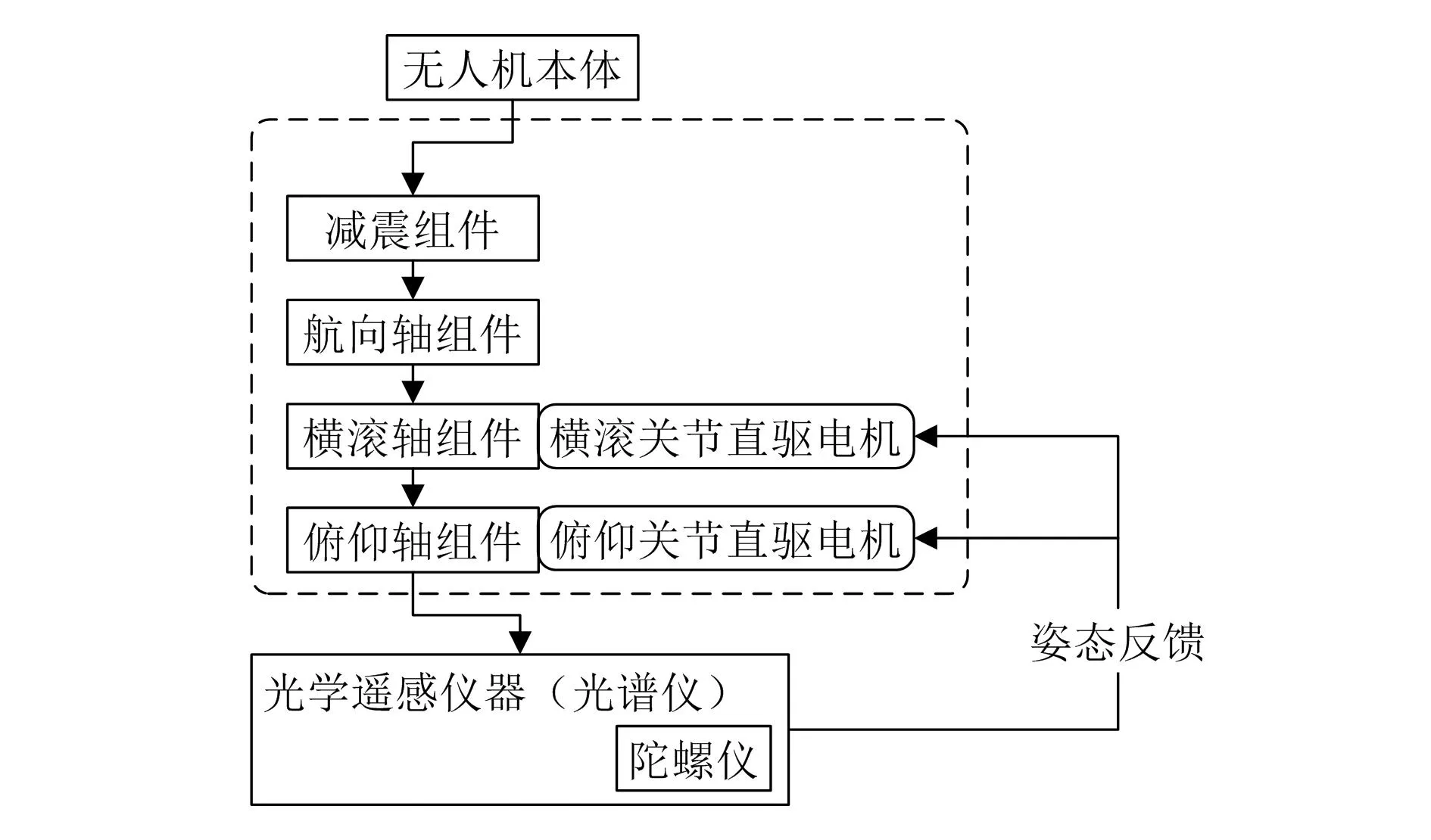
图16 云台姿态闭合控制示意图
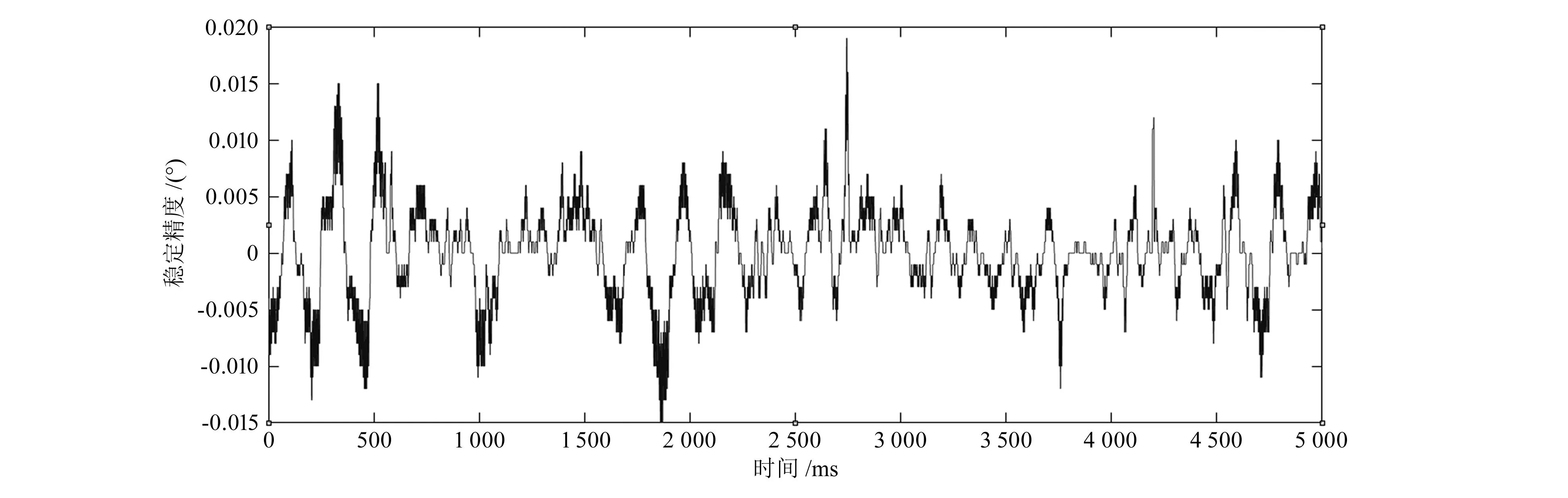
图17 俯仰轴稳定精度
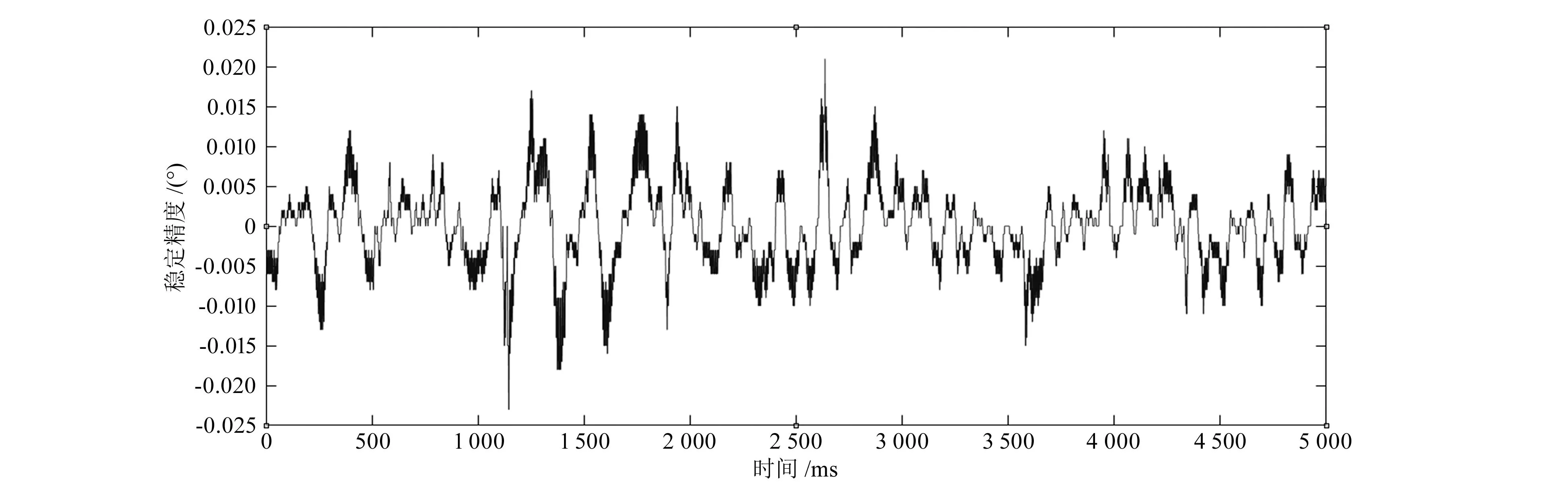
图18 横滚轴稳定精度
5 结束语
由文中的云台结构方案设计、结构静力学仿真、结构动力学仿真可知,云台结构构型、材料选型及关节直驱电机均满足云台稳像功能要求。通过云台样机制造、组装及外场试验挂飞进一步验证了云台方案的合理性,稳定云台成功消除了无人机本体振动和风载荷扰动对光学成像质量稳定性的影响。本文对轻小型、高精度机载稳定云台进行的系统研究方法经实践证明是合理可行的,可为同类型稳定云台研制、迭代升级提供重要参考和借鉴。
