2D DOA Estimation of Coherent Signals with a Separated Linear Acoustic Vector-Sensor Array
2024-03-11ShengLiuJingZhaoDechengWuYiwangHuangKaiwuLuo
Sheng Liu ,Jing Zhao,* ,Decheng Wu ,Yiwang Huang ,Kaiwu Luo
1 School of Data Science,Tongren University,Tongren 554300,China
2 School of Automation,Chongqing University of Posts and Telecommunications,Chongqing 400065,China
Abstract: In this paper,a two-dimensional(2D)DOA estimation algorithm of coherent signals with a separated linear acoustic vector-sensor (AVS) array consisting of two sparse AVS arrays is proposed.Firstly,the partitioned spatial smoothing (PSS) technique is used to construct a block covariance matrix,so as to decorrelate the coherency of signals.Then a signal subspace can be obtained by singular value decomposition(SVD)of the covariance matrix.Using the signal subspace,two extended signal subspaces are constructed to compensate aperture loss caused by PSS.The elevation angles can be estimated by estimation of signal parameter via rotational invariance techniques(ESPRIT) algorithm.At last,the estimated elevation angles can be used to estimate automatically paired azimuth angles.Compared with some other ESPRIT algorithms,the proposed algorithm shows higher estimation accuracy,which can be proved through the simulation results.
Keywords: acoustic vector-sensor;coherent signals;extended signal subspace;sparse array
I.INTRODUCTION
Acoustic vector-sensor(AVS)array has important applications in the location of acoustic signals.Being different from the acoustic scalar sensor,the AVS has four components,and therefore can obtain more acoustic field information.Direction of arrival(DOA)of signal is one of the main functions for acoustic vector-sensor (AVS) array.Since the received model [1] of AVS was introduced for DOA estimation,many DOA estimation algorithms have been proposed.Based on the principle of multiple signal classification (MUSIC) [2],many various MUSIC-based algorithms with AVS array have been proposed,such as self-initiating MUSIC [3],successive MUSIC [4],augmented subspace MUSIC [5],root-MUSIC algorithm [6] and so on.Estimation of signal parameter via rotational invariance technique(ESPRIT)[7]is another subspace algorithm with lower complexity than MUSIC algorithm,which has derived many modified ESPRIT algorithms[8-10]based on AVS array.Propagator method(PM)[11]is a computationally efficient algorithm,which has lower complexity than MUSIC algorithm and ESPRIT algorithm.In[12],a DOA estimation algorithm with AVS has been proposed by extending the original PM algorithm.In addition,some other kinds of DOA estimation algorithms including parallel factor(PARAFAC)algorithm[13,14]and sparse representation algorithm[15]based on AVS array also have been proposed in recent years.With the widespread attention of some sparse arrays [16-19],the sparse concept also has been used for vectorsensor arrays.Some improved DOA estimation algorithms based on nested vector-sensor array [10,20]and co-prime vector-sensor array[21]have been proposed.
However,the algorithms mentioned above are based on the assumption that all signals are incoherent.Multipath propagation of signals occurs often,especially in some complicated environments.Hence,the appearance of coherent signals is a universal phenomenon.Coherent signals can cause the rank of signal covariance matrix to be less than the number of signal sources.Spatial smooth (SS) [22],block covariance matrix reconstruction (BCMR) [23,24]and Toeplitz matrix reconstruction (TMR) [25,26]are frequently-used decorrelation techniques.In[27],BCMR technique was used for L-shaped AVS array,and a two-dimensional (2D) DOA estimation algorithm of coherent signals has been proposed.In[28],in order to reduce complexity and achieve automatic matching of parameters,a 2D DOA estimation algorithm based on array manifold matching (AMM) is proposed for coherent signals by using a linear AVS array.This algorithm also used BCMR technique to remove the deficient-rank of signal covariance matrix.In [29],single-snapshot received vector from a linear AVS array is used to construct a Toeplitz matrix,by which the elevation angles and azimuth angles of coherent signals can be estimated by PM algorithm.But the drawback of this algorithm is its low accuracy,despite its low complexity.In[30],a partitioned TMR algorithm with a rectangle sparse acoustic vector-sensor array is proposed to decorrelate the coherency of the received signals,and PM algorithm is used to estimate the 2D DOA.This algorithm involves the construction of high-order matrix,so it has high complexity.As is well known,SS,BCMR and TMR techniques could cause the loss of array aperture.But most direction-finding algorithms based on the above three techniques have no corresponding aperture compensation process.Hence,the performance of these algorithms could be affected by aperture loss.Although the sparse AVS arrays[10,20,21]have advantages in increasing virtual element and expanding array aperture,conventional decorrelation techniques are difficult to be applied to these arrays.
In our paper,a sparse AVS array structure consisting of two uniform sparse linear arrays is proposed,by which a subspace extension technique is proposed to compensate the aperture loss caused by decorrelation process.A partitioned spatial smoothing (PSS)method is used to construct a block covariance matrix.Through SVD of this matrix,the signal subspace can be obtained.The signal subspace can be extended to two high-order signal subspaces by using the structural characteristics of the array.Dealing with the two extended high-order signal subspaces in ESPRIT,highprecision elevation angles can be estimated.Using the estimated elevation angles,automatically paired azimuth angles also can be estimated.The main advantages of proposed method are as follows: (1)the minimum internal element-spacing of proposed AVS array can be larger than the half-wavelength of signal;(2)aperture loss can be covered by extending the signal subspace;(3) compared with some existing ESPRIT algorithms,proposed algorithm has much better performance in estimation accuracy due to the extended signal subspaces.
Notation:The symbols (·)T,(·)H,(·)+and⊗are used to signify transpose,Hermitian transpose,Moore-Penrose pseudo-inverse,and Kronecker product,respectively.M(i:j,r:t) represents a submatrix consisting of the common elements of theith row to thejth row and therth column to thetth column of matrixM.IMis used to denote anM-order identity matrix.The main argument operation,expectation operation,rank operation and real operation are expressed byarg(·),E{·},rank(·) andreal(·),respectively.
II.DATE MODEL
A symmetric sparse AVS array consisting of twoMelement uniform linear arrays is shown in Figure 1.Letd=λ/2 be the unit length,whereλis the halfwavelength of incident signal.The internal elementspacing of each sub-array ispdand the spacing between the two sub-arrays isqd,whereq=sp+1 withsbeing a positive integer.
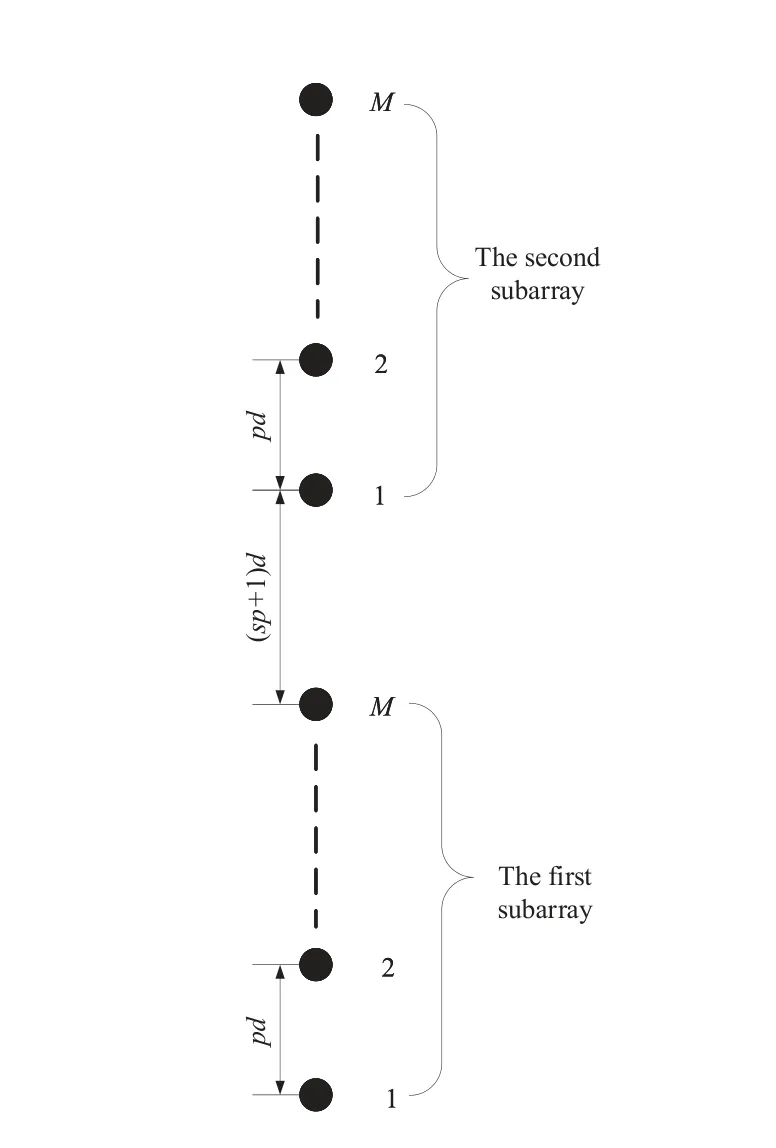
Figure 1.Configuration of the separated linear acoustic vector-sensor array.
Suppose thatKfar-field signals have been received by the symmetric sparse AVS array,where the firstJsignals are coherent and irrelevant to the residual signals.We assume that the number of signals has been estimated by some detection algorithms of number of sources like[31].Then we let the elevation angle and azimuth angle of thekth signal source beθkandβk,k=1,2,···,K,as shown in Figure 2.The received vector of themth AVS in the first array can be written as[28,29]
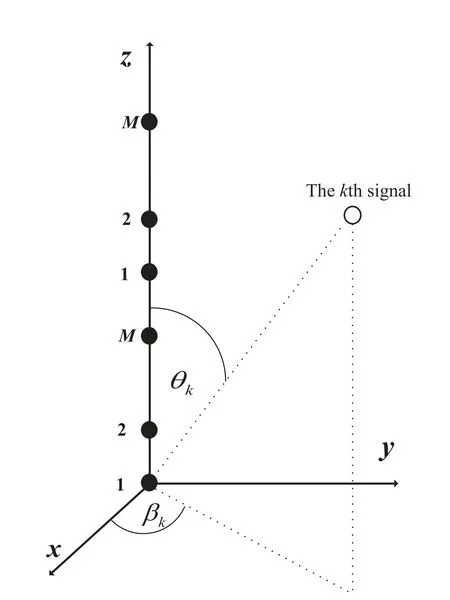
Figure 2.Illustration of elevation and azimuth.
and the received vector of themth AVS in the second array can be written as
whereh(θ,β)=[1,sinθcosβ,sinθsinβ,cosθ]T,sk(t) is thekth signal,e1m(t)∈C4×1is the Gaussian noise vector of themth AVS in the first sub-array ande2m(t)∈C4×1is the Gaussian noise vector of themth AVS in the second sub-array.
with
III.DESCRIBE OF ALGORITHM
3.1 Estimation of Elevation Angles
Denote the total received vector asz(t)=The covariance matrix is denoted asRz=E{z(t)zH(t)},and it is estimated byRzcan be partitioned as
Let the first 4Mrows and last 4Mrows ofRzbeRz1andRz2,respectively.Suppose thatRz1,jconsists of the[4(j-1)+1]th row to the[4(M-J+1)+4(j-1)]th row of matrixRz1andRz2,jconsists of the[4(j-1)+1]th row to the[4(M-J+1)+4(j-1)]th row of matrixRz2,wherej=1,2,···,J.
UsingRz1,jandRz2,j,we can form a block matrix∈C8(M+1-J)×8MJas
When noise is ignored,we have
As[23]and[28],we can know thatrank()=K.
Suppose thatUsconsists of the left singular value vectors ofKmaximum singular values of.LetU1∈C4(M-J+1)×Kbe the first 4(M-J+1)rows ofUs,U2∈C4(M-J+1)×Kbe the last 4(M-J+1)rows ofUs.It’s easy to know that there must be an invertible matrixT∈CK×Kwith
Extract the first 4(M-J) rows and last 4(M-J) rows ofU1to form two matricesU11andU12.Extract the first 4(M-J) rows and last 4(M-J)rows ofU2to form two matricesU21andU22.
According to(7),we can know that
According to(10),we can know that the cumulative error of the estimation ofcan increase ass.Hence,sshould be as small as possible,which can be proved in simulation.
Substituting(7)and(9)into(10),can be expressed as
It was clear that,unambiguous elevation estimation can be obtained by using the eigenvalues of.But,due to the dimensionality reduction of signal subspace,it’s difficult to get high-precision elevation estimation by directly using.
In order to increase the dimension of the signal subspace and improve the estimation accuracy of elevation,we continue to constructpselection matrices
whereei ∈Cp×1is a sparse vector with theith element being 1 and the others being 0.
Then we can construct two matrices∈
Substituting(13)and(14)into(15),can be expressed as
whereγ1,···,γKare the eigenvalues of.
Remark 1.In the ideal state,should be equal to.ButRz is estimated by limited sampling data,so that the estimations ofandwill be different. Since the dimensionality ofandare higher thanand,the estimation ofcontains more accurate angle information than. It is worth stressing that,also is a key matrix for extending the dimension of signal subspace. By using this matrix with the selection matricesMi,we can obtain dimension-raising
3.2 Estimation of Azimuth Angles
In this subsection,we use the estimated elevation angles to estimate the azimuth angles.As [28],we denote two matrices as
whereΦ1=diag{sinθ1cosβ1,···,sinθKcosβK},Φ2=diag{sinθ1sinβ1,···,sinθKsinβK},A(θ)=[a(θ1),a(θ2),···,a(θK)]∈C2M×Kwith
The derivation process about (24) can be found in[28].
According to (24),we can get the estimation ofβkby
IV.COMPLEXITY ANALYSIS
In this section,we compare the complexity of proposed algorithm with the ESPRIT algorithm based on SS (SS-ESPRIT) [8,22],the ESPRIT algorithm based on AMM (AMM-ESPRIT)[28],the successive MUSIC algorithm based on SS (SS-MUSIC)[4,22]and PM algorithm [12].Suppose that the number of sensors isL,Tis the number of snapshots andηis the number of steps for search in SS-MUSIC.The major computational complexities of SS-ESPRIT algorithm,AMM-ESPRIT algorithm,SS-MUSIC algorithm,PM algorithm and proposed algorithm areO{(4L)2T+[4(L-J+1)]3},O{(2L)2T+2LJ[2(L-J+1)]2},O{(4L)2T+[4(L-J+1)]3+2Kη(16(L-J+1)2+4(L-J+1) -K-4(L-J+1)K},O{16K(L-K)T}andO{(4L)2T+4LJ[4(L-2J+2)]2},respectively.Obviously,the complexity of proposed algorithm is close to SS-ESPRIT algorithm,lower than SS-MUSIC algorithm but higher than AMM-ESPRIT algorithm and PM algorithm.LetL=10,K=J=2,η=100,and the complexities of five algorithms versus snapshots are shown in Figure 3.

Figure 3.Complexities of five algorithms versus snapshots.
V.SIMULATION
In this section,some simulation comparison results are presented to prove the effectiveness of the proposed method.Consider that two coherent signals with (θ1,β1)=(65o,30o) and (θ2,β2)=(75o,40o)are received by AVS array in the first three groups of experiments.The root mean square error(RMSE)for 2D DOA estimation is given as
In the first experiment,we compare the proposed algorithm with SS-ESPRIT algorithm,AMM-ESPRIT,SS-MUSIC algorithm and PM algorithm.For proposed algorithm,we used a 10-element array withp=3 andq=p+1.A 10-element uniform array with 3dspacing is used for the other four algorithms.The variation of RMSE along with SNR for the five algorithms is shown in Figure 4,where the number of snapshots is 500.The variation of RMSE along with the number of snapshots for the five algorithms is shown in Figure 5,where SNR is 10dB.The Cramer Rao Bound(CRB)[32]is given according to the proposed array.Comparison results in the two figures can fully prove that the performance of the proposed algorithm is significantly better than SS-ESPRIT algorithm,AMM-ESPRIT,PM algorithm and slightly better than SS-MUSIC algorithm.
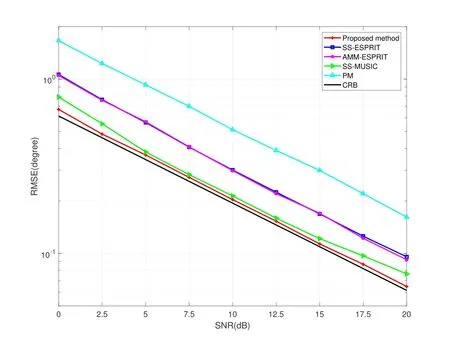
Figure 4.RMSE versus SNR for the five algorithms.
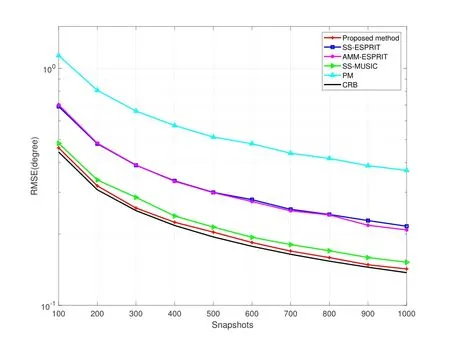
Figure 5.RMSE versus snapshots for the five algorithms.
In the second experiment,we fixq=p+1 and compare the performance of the proposed algorithm for differentp.The variation of RMSE along with SNR for the proposed algorithm with differentpis shown in Figure 6,where the number of snapshots is 500.The variation of RMSE along with the number of snapshots for the proposed algorithm with differentpis shown in Figure 7,where SNR is 10dB.The comparison results in Figure 6 and Figure 7 reflect that the performance of the proposed AVS array withp=2 is inferior to the other two AVS arrays.Hence,pshould not be too small.
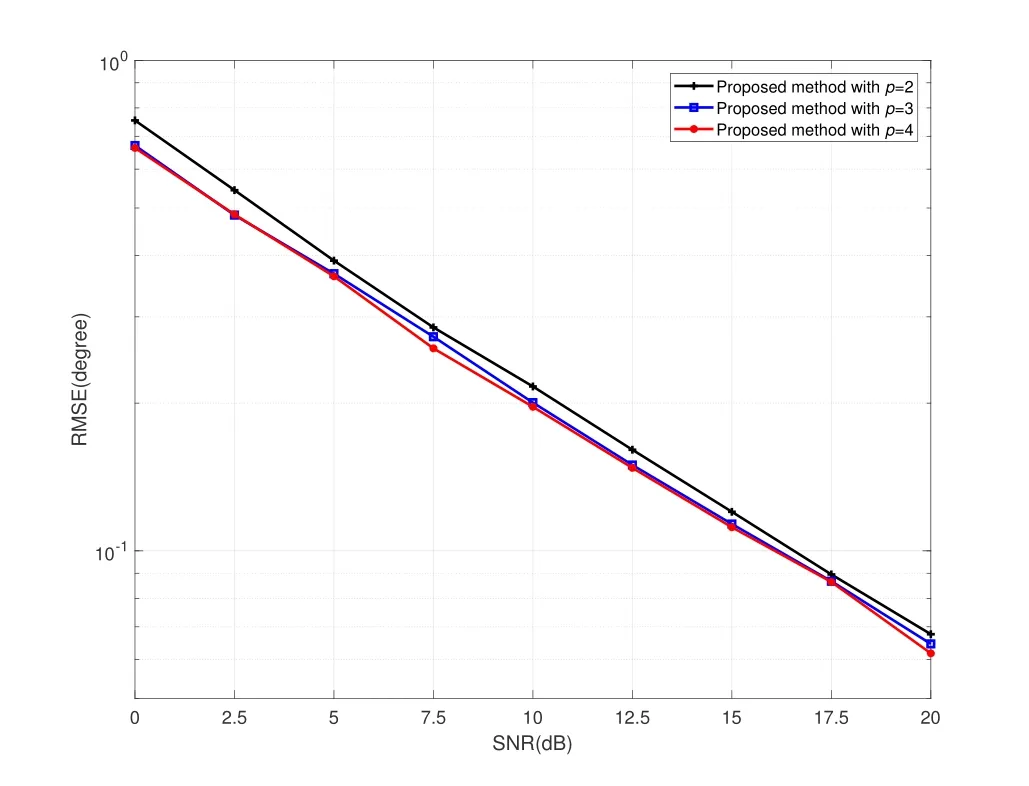
Figure 6.RMSE versus SNR for proposed algorithm with different p.
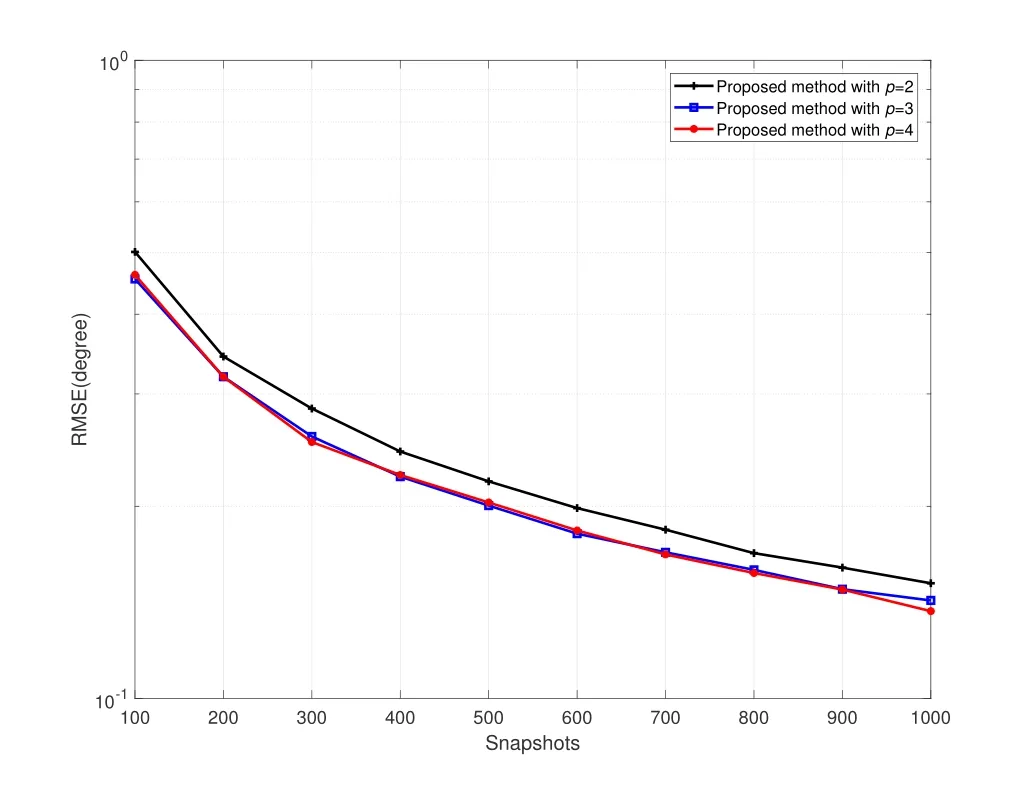
Figure 7.RMSE versus snapshots for proposed algorithm with different p.
In the third experiment,we fixp=3 and compare the performance of proposed algorithm for differents,whereq=sp+1.The variation of RMSE along with SNR for the proposed algorithm with differentsis shown in Figure 8,where the number of snapshots is 500.The variation of RMSE along with the number of snapshots for the proposed algorithm with differentsis shown in Figure 9,where SNR is 10dB.From the two figures,we can find that the performance of the algorithm could degrade whensis larger.
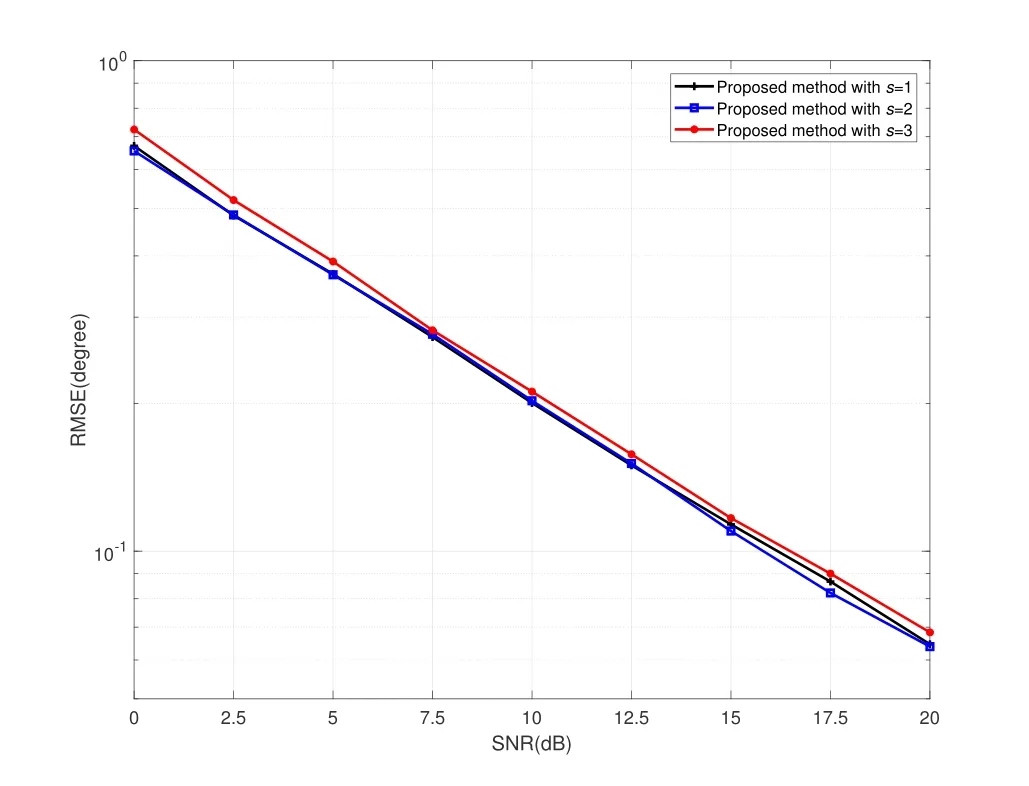
Figure 8.RMSE versus SNR for proposed algorithm with different s.

Figure 9.RMSE versus snapshots for proposed algorithm with different s.
In the fourth experiment,we test the estimated performance of the proposed method for the spatiallyclosed signals.We fix SNR at 20dB and the number of snapshots at 500.The array withp=3 ands=1 is used to estimate the 2D DOAs of signals.Firstly,we consider two coherent signals with (θ1,β1)=(65o,30o) and (θ2,β2)=(67o,32o).Then,we consider three signals with (θ1,β1)=(65o,30o),(θ2,β2)=(67o,32o) and (θ3,β3)=(69o,34o),where the first two signals are coherent.Figure 10 and Figure 11 list 100 estimated results by the proposed algorithm in the two cases,respectively.The estimated results in the two figures can show that the proposed algorithm has better angle resolution.
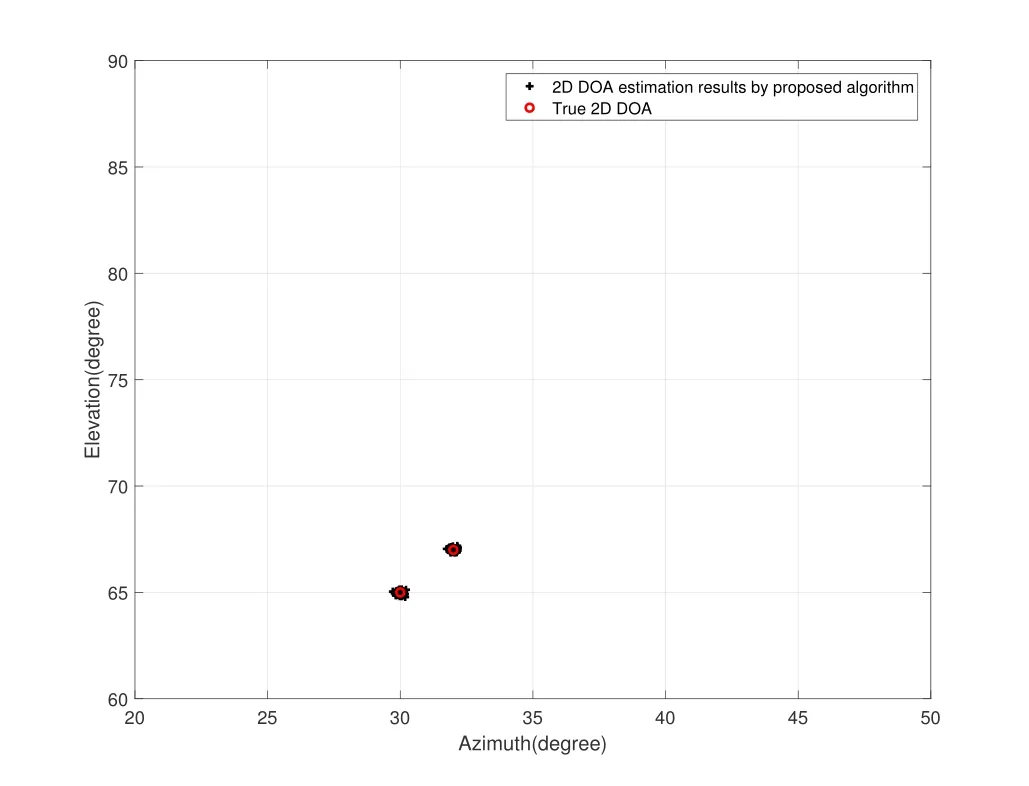
Figure 10.Estimated results of 2D DOA for two spatiallyclosed signals.
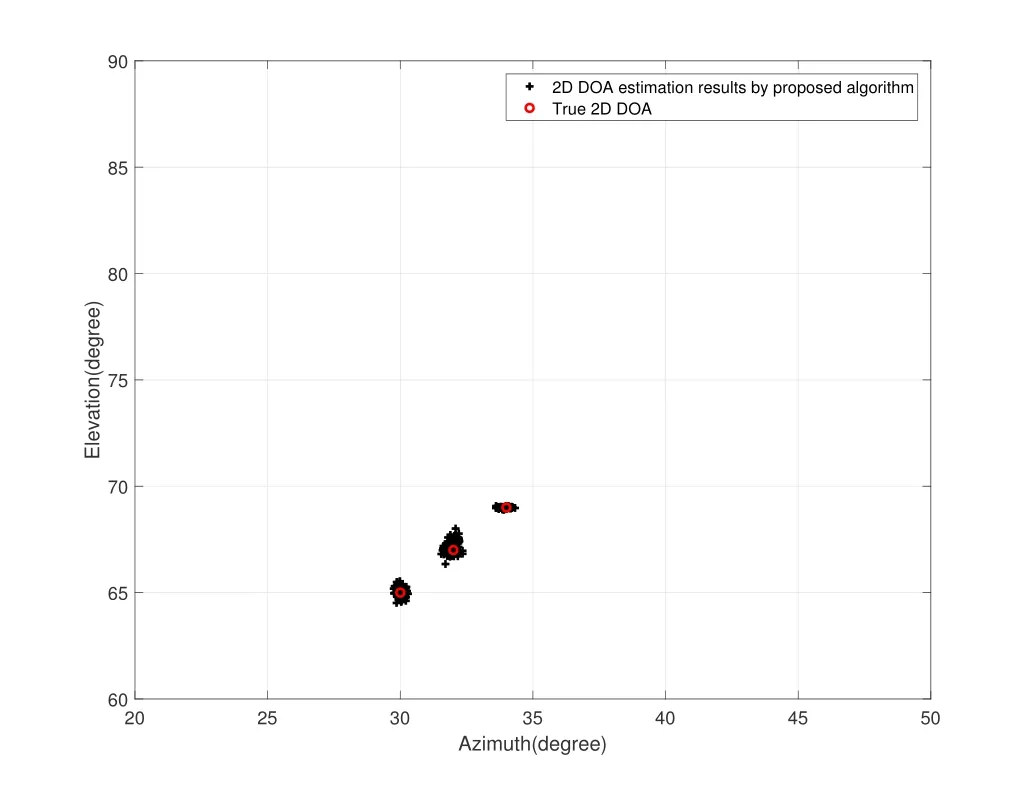
Figure 11.Estimated results of 2D DOA for three spatiallyclosed signals.
VI.CONCLUSION
In this paper,we have proposed a 2D DOA estimation algorithm of coherent signals in a separated linear AVS array.The used AVS array consists of two sparse uniform arrays.The element spacing of arbitrary two sensors can exceed half-wavelength of signal.The influence of coherent signals is removed by a PSS technique,and two high-order signal subspaces are got to cover the aperture loss.Sequently,2D DOAs of all signals can be estimated.Simulation results show that the proposed algorithm has markedly higher estimation accuracy than the other two ESPRIT algorithms and the RMSE of DOA estimation by proposed algorithm is in close proximity to CRB,which can fully prove the effectiveness of the proposed algorithm.
ACKNOWLEDGEMENT
This work was supported by the National Natural Science Foundation of China (62261047,62066040),the Foundation of Top-notch Talents by Education Department of Guizhou Province of China (KY[2018]075),the Science and Technology Foundation of Guizhou Province of China (ZK[2022]557,[2020]1Y004),the Science and Technology Research Program of the Chongqing Municipal Education Commission (KJQN202200637),PhD Research Start-up Foundation of Tongren University (trxyDH1710) and Tongren Science and Technology Planning Project((2018)22).
杂志排行

China Communications的其它文章
- An Efficient Approach to Escalate the Speed of Training Convolution Neural Networks
- Reliability Assessment of a New General Matching Composed Network
- Cooperative User-Scheduling and Resource Allocation Optimization for Intelligent Reflecting Surface Enhanced LEO Satellite Communication
- Flight Time Minimization of UAV for Cooperative Data Collection in Probabilistic LoS Channel
- Joint Optimization of Resource Allocation and Trajectory Based on User Trajectory for UAV-Assisted Backscatter Communication System
- Cooperative Anti-Jamming and Interference Mitigation for UAV Networks: A Local Altruistic Game Approach