风电场AVC系统无功分配方法的探讨
2024-03-08安徽立卓智能电网科技有限公司安静雨
安徽立卓智能电网科技有限公司 安静雨 袁 帅 宋 坤
1 风机以及SVG 控制现况描述
目前,风电场内AVC 系统对于无功源的分配基本有优先级的设置[1],即优先控制某一种无功源,例如优先将无功目标分配给风机机组,当风机机组没有可发无功时,再将多余的无功目标分配给SVG 或者储能。
风机机组在风电场内部的无功源中有台数多、总容量大、可发容量实时变化、低功率时无功控制不稳定等特点,这些特点决定了风机机组是所有无功源中较为难以控制的一种。控制的难度主要在于AVC 系统无法精确地估算风机可发无功容量。大部分AVC系统采用风机台数与单台可发无功容量的乘积作为风机无功可发容量,或者简单设置功率因数,通过功率因数计算风机可发无功容量,这样计算无法做到精确分配,往往存在某些机组无法执行无功目标的问题。
当前,SVG 基本存在一个无功执行的盲区,即当SVG 无功为0时,存在一个正负相对应的区间,当AVC 分配给SVG 的目标无功落在此区间内,SVG 会拒绝执行该指令,且无功保持在0左右,当指令越过盲区后,SVG 又开始执行该指令。
2 基于精确计算风机无功可发容量的单机风机无功控制法
2.1 方法概述
本方法将无功可发容量分为可增有功容量以及可减有功容量,通过加入并网状态和10%功率限制作为判据,对可增有功容量和可减有功容量进行精确计算,以此排除没有并网的机组以及低功率状态机组。排除低风速的风机是为了无功控制的稳定,风机在刚并网时需要由电网吸收无功功率,此时风机虽然已经并网但实际不具备无功调节能力,在低风速下风机无功控制同样不太稳定。通过以上两个判据筛选出参调风机,并由AVC 系统对单台风机直接控制,可解决无功可发容量计算不准导致的响应慢、效果差等问题。

表1 某风场风机已并网有功出力低于10%时无功执行情况

表2 某风场风机已并网有功出力高于10%时无功执行情况
2.2 计算原理
AVC 系统对风机的并网状态进行采集,首先排除没有并网的风机机组。排除实时功率低于10%额定功率的风机机组。对于剩余参调风机,根据现场设置的功率因数计算每台风机可发无功上下限。
其中Qk1为单台风机可发无功上限,则可发下限为-Qk1,cosφ 为现场运行人员设置的功率因数运行限制值,Pr1为单台风机实时的有功出力,Qr1为单台风机实时的无功出力,Qa1为该风机可增无功容量,Qc1为该风机可减无功容量。
对所有符合条件机组的可增、可减无功容量进行叠加,即可获得风场风机机组可增无功容量与可减无功容量:
满足调度要求所需的无功增量为Q,Q 为正值,说明此时无功需要增加,增量与可增机组容量进行比较。若Q <Qa,风机可承担全部无功增量,反之说明风机容量无法满足要求,需要另外的无功源设备补充。
在风机满足要求的情况下,按照等功率因素分配方式,计算总功率因素目标,再根据功率因素目标计算单台风机的无功目标值:
其中cosφtar为总功率因数目标,ΣPr 为参与调节风机实时功率总和,Pr1为单台风机实时功率,Q1tar为单台风机目标无功。
若Q >Qa,说明无功增量已经超出风机可发无功容量,此时AVC 给单台风机下发的无功目标应该是该风机无功可发上限,即Q1tar=Qk1,再计算需要其他设备增补的无功量Δq,只须要将Δq 分配给其他无功源设备即可。
Δq=Q-Qa
对于增量为负值的情况,遵循以上原则进行分配,只是将增量转变为减少的量,计算过程响应相同。
2.3 控制效果试验
某风电场AVC 系统控制顺序为优先控制风机,其通过设置的功率因素以及风机的运行状态计算无功可发容量。该现场风机单机容量为2MW,功率因素设置为0.98,单台风机根据功率因数计算所得的可发无功上限为0.4MVar,可发无功下限为-0.4MVar。
2.3.1 风机存在运行状态和并网状态两种工况
现场6台风机,其中3台处于运行状态,3台处于并网状态。运行状态下的风机由于尚未达到并网状态,所以有功出力为0,无功处于不可控状态。并网状态的风机均在额定功率运行下运行,风机初始无功功率均为0,AVC 分配给风机的无功增量均为1MVar。

表3 AVC 原有算法的执行效果

表4 新算法的执行效果
AVC 原算法没有将#1~#5台风机剔除运算队列,导致AVC 给风机下发0作为无功目标,而风机无功实际处于不可控状态,导致AVC 原有算法无功增量最终执行0.73MVar,使用本文介绍的新算法将#1~#5台风机剔除运算队列,#1~#5台风机的初始功率将代数叠加到#6~#10号风机,新算法无功增量最终执行1.09MVar。
2.3.2 风机存两种不同有功出力
现场10台风机均为并网状态,其中5台有功出力低于10%额定功率,5台风机额定功率下运行。10台风机的初始无功功率均为0,AVC 分配给风机的无功增量均为2MVar。
AVC 原有算法没有将低于10%额定功率的#1~#5风机剔除运算队列,#1~#5风机无功执行效果较差,原有算法无功增量最终执行1.79MVar,使用本文章介绍的新算法将#1~#5风机剔除运算队列,将所有的无功增量分配给#6~#10风机,新算法无功增量最终执行1.98MVar。
2.3.3 风机均额定功率运行
现场6台风机均处于并网状态下,额定功率运行。6台风机的初始无功功率均为0,AVC 分配给风机的无功增量均为3MVar。不同的算法给单台风机分配的目标以及执行效果见表5。

表5 额定功率状态下AVC 原算法的执行效果

表6 额定功率状态下AVC 新算法的执行效果
在10台风机均为额定功率运行的情况下,两种算法分配一致,原算法无功增量最终执行2.92MVar,新算法无功增量最终执行2.94MVar。
2.4 试验结论
通过设计的三种运行工况下的试验,基本可以得到以下试验结论:一是在风机存在运行状态和并网状态两种工况下,新算法控制精度高于原算法。二是存在功率低于10%额定功率的风机时,新算法控制精度高于原算法。三是在风机都处于额定功率运行时,两种算法分配一致,控制精度基本相同。
3 基于避开SVG 执行盲区的SVG 规避控制法
3.1 方法概述
SVG 在执行无功目标时有很多优点,比如响应快、精度高等,但执行盲区的存在SVG 执行无功精度的主要原因。在实际运行中通过AVC 的计算来规避这一区间是相对简单便捷的做法。
该方法第一步通过试验测算出现场SVG 的执行盲区范围,在AVC 给SVG 分配目标时将该区间参考进去,使AVC 的无功目标落在区间之外,多余的增量则由其他无功源设备弥补。
3.2 计算原理
首先要计算出SVG 的无功执行盲区(-QDZ,QDZ),这需要通过现场对SVG 的反复试验得到。盲区都是以0为中心,正负对称展现。在AVC 给SVG 分配目标前先检查目标是否落在该区间内。若SVG 的目标不在区间内(QSVG≥QDZ或者QSVG≤-QDZ)则直接向SVG 输出目标。若SVG 的目标落在区间内(-QDZ<QSVG<QDZ),则判断SVG 目标无功与实际无功差值的正负
QSVG-QSVG.P=ΔPSVG
其中QSVG.P是SVG 的实时无功,ΔPSVG>0表明此时需要增加无功出力,AVC 直接下发QDZ作为SVG 的目标无功,计算多出的无功增量并分配给其他的无功源设备。
QDZ-QSVG=ΔPSVG.S
其中ΔPSVG.S是多出的无功增量,ΔPSVG<0表明此时需要减少无功出力,AVC 直接下发-QDZ作为SVG 的目标无功,计算多出的无功增量并分配给其他的无功源设备。
|-QDZ-QSVG|=ΔPSVG.S
3.3 控制效果试验
现场使用一台SVG 和两台风机作为试验设备,控制优先级设置为SVG 优先控制,其中SVG 的无功执行盲区为±0.8MVar,风机均在额定功率状态下运行。初始总无功为0.8,AVC 下发增量为-1,风机和SVG 总无功出力需要调节至-0.2,试验数据见表7。
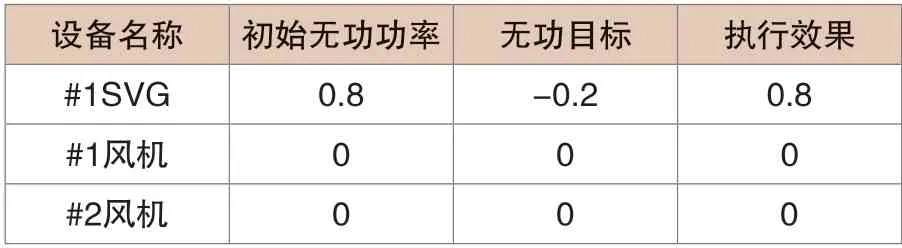
表7 无功目标落在盲区内原算法执行效果
表7中总无功出力没有变化,说明AVC 下发的无功增量无法得到执行,表8中总无功出力执行为-0.23,无功增量得到较好地执行。

表8 无功目标落在盲区内新算法执行效果
通过上述数据可以看出原有算法存在缺陷,当AVC 下发的目标刚好在执行盲区时,指令无法执行,而新算法则规避了这个问题,通过风机与AVG的协作执行了无功目标。