基于Gazebo 虚拟世界的草莓采摘机器人仿真研究
2024-03-08裴双成
裴双成,钟 波
(1.湖南农业大学机电工程学院,湖南 长沙 410128;2.长沙市开福区福安水利管理所,湖南 长沙 410003)
0 引言
中国草莓的种植面积与总产量一直位居世界前列[1]。草莓作为一种高营养的水果,深受消费者喜爱。然而,草莓的生产成本非常高昂,主要是因为人工采摘的劳动力成本大,这也给草莓产业带来了巨大的经营不确定性[2]。因此,迫切需要提高草莓采摘的自动化水平,以解放劳动力并降低采摘成本。与苹果、柑橘等其他水果相比,草莓的果实更为娇嫩,传统的机械采摘装置很容易造成草莓破损,因此目前基本上只能依靠人工采摘。通过采摘机器人模仿人工的操作,利用机器视觉系统在果园的自然环境中准确识别和定位草莓,并模拟人手的采摘动作完成采摘作业,是提高草莓机械化收获水平的有效途径[3-6]。
草莓采摘机器人的开发研究涉及机械、电控、机器视觉、人工智能等一系列相关系统,具有很大的开发难度和研发周期。为了解决这个问题,应用计算机仿真技术可以在虚拟环境中集成模拟草莓采摘机器人所需的系统和功能,通过进行前期开发试验和算法验证,可以在较短的时间内完成开发工作,从而大大缩短开发周期并降低开发成本。因此,草莓采摘机器人的仿真研究具有重要的意义[6-9]。
通过计算机仿真技术,可以建立一个虚拟的果园环境,在其中模拟草莓植株的生长状态、果实的成熟度和分布情况等。同时,可以集成机器视觉系统,使机器能够准确地识别和定位草莓果实。此外,还可以模拟机器手的动作和力度,以完成草莓的采摘作业。通过对这些系统和功能进行仿真研究,可以评估机器的性能和稳定性,并优化算法和控制策略,以提高草莓采摘机器人的效率和准确性。宁玥利用3Ds MAX软件绘制农机的三维模型,通过Unity3D 软件解析运动及作业流程,并进行了网络化在线展示,对实现设计者和需求者之间的交流交互具有重要的作用[10]。李林峻等采用网络化协同设计的方式对农机发动机进行设计与优化,提高了农机零部件的设计水平,缩短了设计周期,提升了生产效率[11]。马斌强等采用ADAMS 软件对平行四杆机构的液压举升机构进行仿真设计,并验证其性能参数,为实际设计机构提供了依据[12]。于圣洁等利用SolidWorks 建立就地翻土犁数学模型,并通过EDEM 软件构建土壤颗粒离散元模型,模拟土壤耕作试验[13]。
在草莓采摘机器人的仿真研究中,还可以模拟不同的环境条件和任务场景,例如不同的果园布局、不同的草莓品种和果实形状等。通过对这些场景的仿真研究,可以为机器人的实际应用提供指导,并提前解决可能出现的问题。
1 材料与方法
草莓果实在生长时因重力影响易下垂,较易被周围枝叶遮挡,传统的机器视觉系统在果园环境下难以准确识别成熟的草莓果实。为了解决该问题,本文采用Kinect 相机采集自然环境下的草莓图像,使用YOLOv8 卷积神经网络模型对草莓检测模型进行迭代训练,将最优权重模型作为草莓的实时检测模型用于识别草莓果实与枝叶,同时通过Kinect 相机三维点云数据获得草莓与障碍物的准确空间坐标[14]。针对果园环境下光照度差异对草莓识别影响较大的问题,本文通过增加不同光照度以及顺光和逆光条件下的草莓数据集来优化草莓检测模型。考虑到草莓成熟时间不一致,采摘时拍摄的图像中包含成熟与未成熟的草莓,本文在进行草莓数据集标注时,将成熟草莓与未成熟草莓分别进行标注,并将标签设置为“ripe”与“unripe”。标注完成后随机抽取100 张草莓图像交由果农确定标注的成熟草莓与未成熟草莓是否准确,以增大数据集的可靠性。
2 机构设计
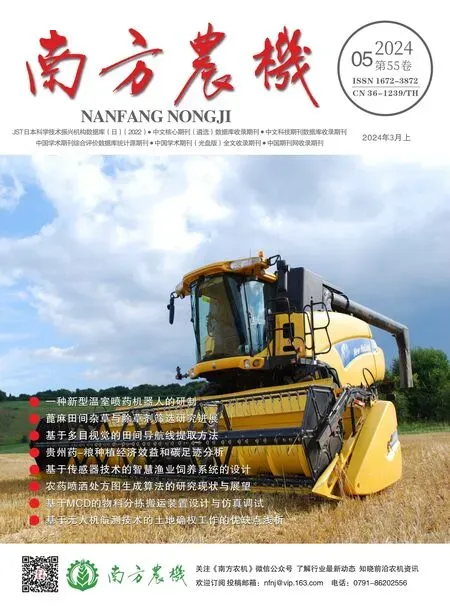
草莓的表皮相对较为脆弱,一旦损坏,草莓的保鲜期将大大缩短,对于销售也不利。因此,在采摘草莓的过程中,需要非常精准地进行操作,以避免对草莓表皮造成损伤。为了满足这一要求,本文设计了一种草莓采摘机器人,主要由Kinect 深度相机、六轴机械臂以及三爪夹持式采摘机械手组成,如图1所示。

图1 草莓采摘机器人
2.1 六轴机械臂设计
本文的六轴机械臂通体由3D 打印部件组成,如图2 所示,轴间驱动采用了伺服电机,配备谐波减速器,可以在充分保证运动精度的同时尽可能降低制作成本[6]。六轴联动下,机械臂末端运动半径最大可达770 mm,完全满足小型辅助采摘设备的基本需求[5]。
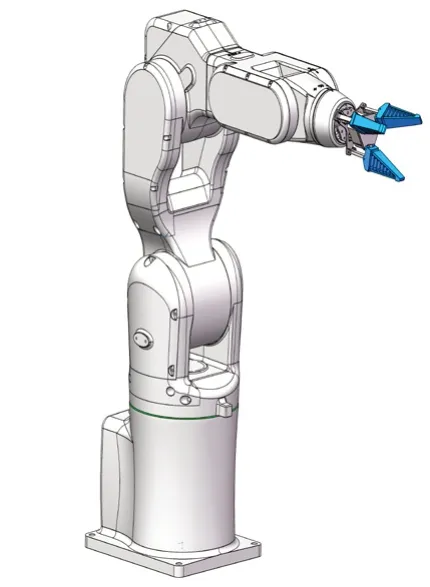
图2 六轴机械臂
2.2 三爪夹持式采摘机械手设计
基于曲柄连杆机构,并仿照人手三指捏合的动作原理,设计了三爪夹持式采摘机械手,并通过42 步进电机驱动底板前后移动,使三指连接的曲柄同时闭合,以牢固夹持草莓,三爪夹持式采摘机械手如图3所示[15]。同时,三指末端采用柔软的橡胶材料,夹持草莓时可按照草莓外表皮进行形变,减小了采摘过程中对草莓表皮的损伤[16]。
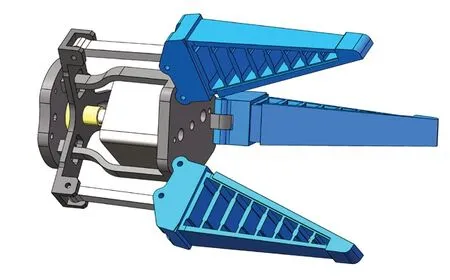
图3 三爪夹持式采摘机械手
3 运动仿真分析
将六轴机械臂及三爪夹持式采摘机械手的SolidWorks 模型转换为URDF 模型文件,便于导入Gazebo 环境中。使用Ubuntu 下ROS 的Moveit 插件,导入URDF 文件,构建六轴机械臂在Rviz 三维可视化平台插件中正、逆解的运动规划文件,同时在文件包中配置Gazebo 仿真环境的执行命令。配置完成后,执行roslaunch 文件,打开Rviz 三维可视化平台及Gazebo 仿真环境,草莓采摘机器人的模型同时在Rivz 和Gazebo 中显示,通过Rviz 发送控制信息后,Gazebo 仿真世界中草莓采摘机器人将执行同样的动作,并有实时的三维点云数据与相机画面在Rviz 中显示,如图4所示。
图4 Gazebo世界中的草莓采摘机器人
为真实地还原草莓采摘的自然环境,在Gazebo环境中添加草莓垄和草莓作物,以及作为障碍物的围栏[17]。移动草莓采摘机器人至草莓垄前,Kinect 相机扫描的三维点云数据实时显示在Rviz 中,并获得草莓和障碍物的精确三维空间坐标[18],如图5所示。
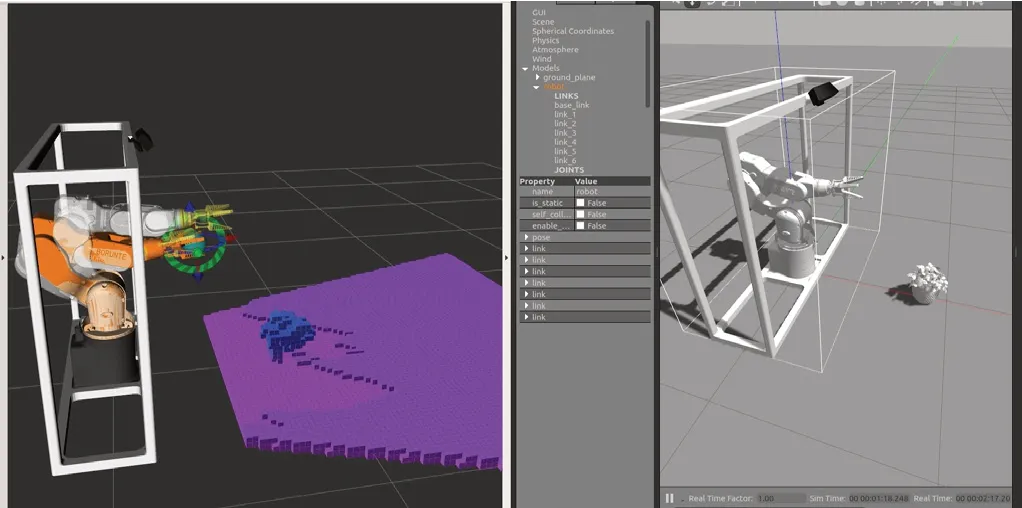
图5 Kinect相机三维点云数据
其中,以六轴机械臂底盘最低面的中心为原点,建立世界坐标系,而草莓果实的三维空间坐标所在坐标系是在Kinect 相机物理坐标系和像素坐标系下构建的,为得到在世界坐标系下正确的草莓果实坐标,需要将三个坐标系进行转换。为便于机械臂接收运动坐标,选择将像素坐标系通过旋转变换及平移变换同步至世界坐标系下。
首先,将像素坐标系转换至相机物理坐标系下,转换公式如式(1)所示:
图像的单个像素在相机物理坐标系的X轴方向和Y轴方向上的大小分别为dx、dy,草莓果实在像素坐标系上的坐标为(u,v)。
变换的公式如式(2)所示:
其中,XW、YW、ZW为草莓果实在机械臂的世界坐标系中的三维坐标,XC、YC、ZC为草莓果实在相机坐标系中的三维坐标,R为旋转矩阵,t为平移矩阵。
转换坐标系后,在Rviz 中输入草莓的空间坐标,六轴机械臂通过Moveit 插件中的运动学求解器IKFAST 进行运动规划。IKFAST 是一种基于解析算法的运动学插件,可以保证每次求解的一致性,并且可以求解任意复杂运动链的运动学方程(解析解),产生特定语言的文件后供使用[19-20];其运动规划比较稳定且速度快,在最新的处理器上能在5 μs内完成单次运动规划的运算。使用该插件的运动规划可以验证机械臂运动到该坐标的可行性,如运动过程中存在障碍,运动规划将中止,并重新规划,如图6所示[21]。
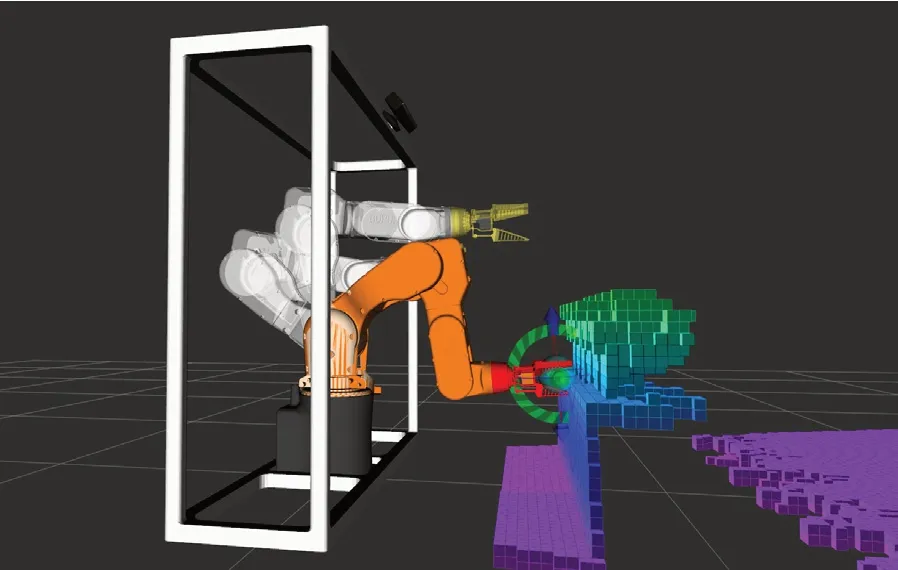
图6 机械臂运动规划
运动规划完成后,通过Rviz 将六轴的控制信息发送至Gazebo,Gazebo 中的草莓采摘机器人模型按照Rviz 中的运动规划轨迹进行,三爪夹持式采摘机械手移动至草莓果实处,三指闭合,机械手夹持住草莓后,机械臂返回原点,并将草莓根部扯断,完成采摘。
在Rviz 中将生成草莓采摘机器人的末端运动轨迹,可用于分析机械臂运动规划的合理性及轨迹算法的研究,为运动避障提供准确的运动数据,如图7 所示。同时,Kinect 相机的三维点云数据也将记录运动过程的位姿变化,便于草莓采摘机器人的调整[22]。
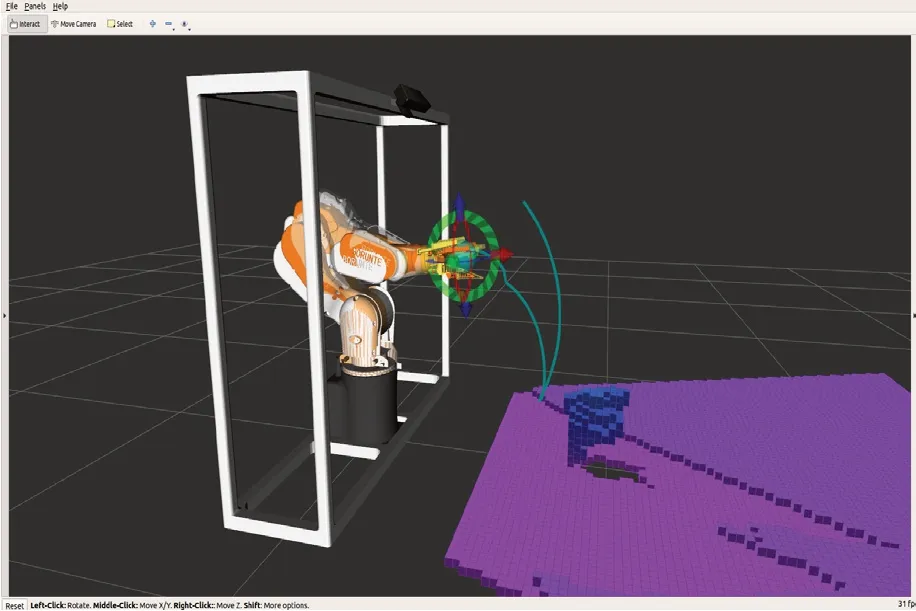
图7 Rviz可视化末端机械手运动轨迹
4 讨论
首先,本文使用了G a z e b o 仿真环境,较SolidWorks 等软件,能更真实地还原草莓采摘的自然环境,包括垄道、作物、栅栏、枝叶等,对验证草莓采摘机器人的方案可行性具有直观的效果。
其次,在Rviz 中可生成可视化的末端运动轨迹,可为六轴机械臂或其他多轴运动机械的运行轨迹设计提供准确的实验数据,并且可与修改后的机械运动轨迹进行对比,更好地确定机械运动的关键参数。
再次,本文结合了Kinect 相机进行仿真,可实时获取周围的环境信息,三维点云数据的应用可将环境感知融入到仿真研究中[23-24]。
最后,本文设计了一种基于曲柄连杆机构的三爪同步夹持式采摘机器人,仿照人手三指捏合的动作,采摘草莓时更加自然,末端的橡胶材料则能保证尽可能无损采摘草莓,并结合六轴机械臂进行了仿真采摘研究。
5 结论
本文基于Gazebo 虚拟世界对自制的草莓采摘机器人进行了仿真研究。为了更贴近现实的仿真效果,本文充分模拟了草莓采摘的自然环境。在Gazebo 虚拟世界中,创建了一个果园场景,包括草莓植株的生长状态、果实的成熟度和分布情况等。通过这样的模拟,可以更加真实地评估草莓采摘机器人的性能和稳定性。
在仿真过程中,融合了Kinect 相机,用于感知外界环境。Kinect 相机可以生成三维点云数据,能够准确地感知Gazebo 虚拟世界中的物体。通过对这些点云数据进行处理,可以为草莓采摘机器人提供准确的坐标信息,帮助机器人精确地定位和采摘草莓。同时,在仿真过程中记录了草莓采摘机器人的可视化末端运动轨迹。这些数据对于后续的避障算法和路径规划非常有帮助。通过分析这些运动轨迹,可以了解机器人在采摘过程中可能遇到的障碍物和困难,从而优化机器人的动作和控制策略,提高采摘的效率和准确性。
通过基于Gazebo虚拟世界的仿真研究,可以在较短的时间内完成草莓采摘机器人的开发工作,并降低开发成本。同时,还可以在虚拟环境中模拟不同的任务场景,例如不同的果园布局和果实形状,以提前解决可能出现的问题,并为机器人的实际应用提供指导。